Вопросы по iNav

Господа моделисты приветствую. Никого нет с Уфы кто возьмется настроить мне этот айнав на крыле? Понимаю что звучит бредово, но к майским хотелось бы взять крыло на дачу, поосваивать, боюсь не успею я айнав хотя бы кривобоко настроить… Времени совсем нет осваивать мануалы и инструкции к прошивке и настройке. АП матек 405 стр, крыло z84. В лс если есть кто пожалуйста
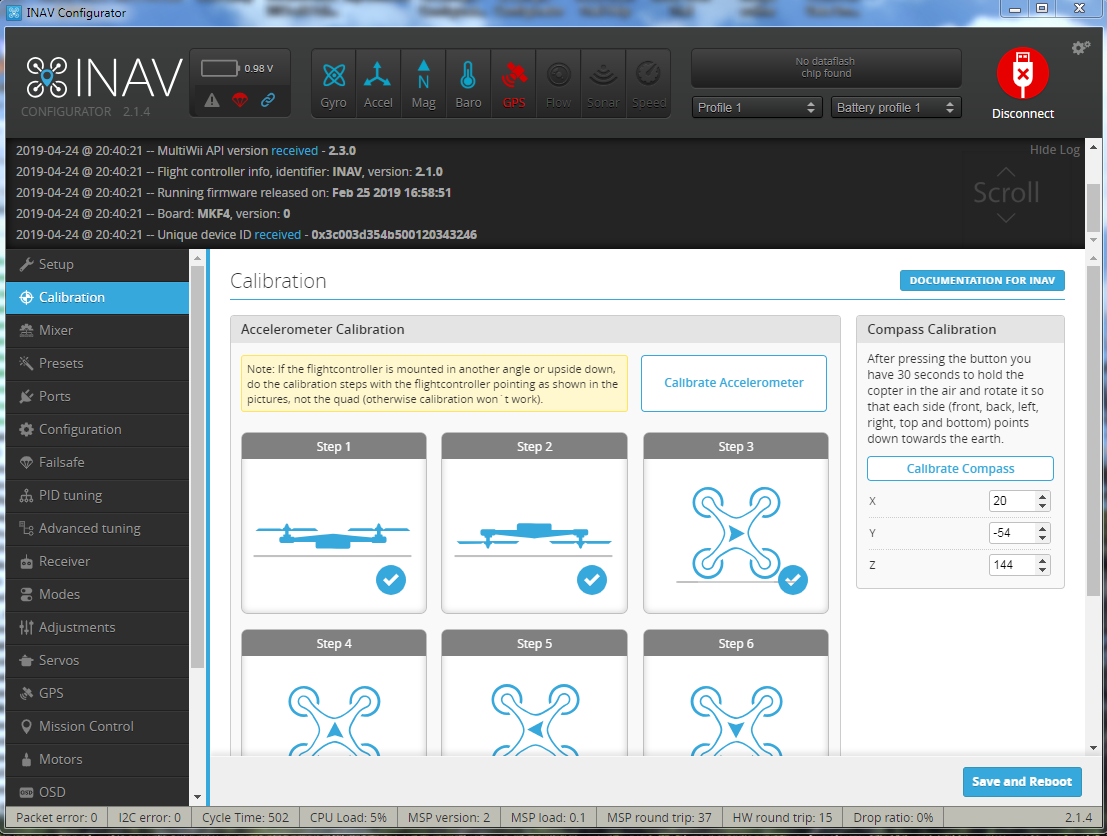
В конфигураторе Inav 2.1.4 нет кнопки калибровки компаса.
Как откалибровать компас?
В конфигураторе Inav 2.1.4 нет кнопки калибровки компаса.
Не ерундите
Как откалибровать компас?
Например, комбинацией стиков (мануал в помощь).
Попробуй прошится на 2.1 ибо в 2.0 была эта проблема решена,если нет то нужно будет увеличивать навигационные пиды хотя сейчас оно и в стоке норм летает
Дмитрий, а почему вы решили, что жпс пиды надо повышать? Вообще-то когда идет перекомпенсация (промах) с последующим демпфированием и снова перекомпенсацией (возврат с очередным промахом) надо понижать навигационный П пид и увеличивать навигационный Д пид.
Собрал и настроил квадрик. Полетник Matek 405ctr работает под Inav2.1.4. GPS
Радиолинк TS100. Квадрик без проблем летает в режиме акро и горизонт. GPS ловит 10-12 спутников. В режиме ALTHOLD и POSHOLD квадрик вообще не держит позицию, улетает резко вбок. Компас развернул на 270 градусов и откалибровал на улице. В чем может быть проблема?
Не надо ничего разворачивать. Компас поставить стрелкой вперед, в конфигураторе выбрать ориентацию компаса CW270FLIP. Тогда все полетит.
В режиме ALTHOLD и POSHOLD квадрик вообще не держит позицию, улетает резко вбок.
В альтхолде он и не должен держать позицию - только высоту.
Улёт в позхолде - это неправильная настройка компаса либо неправильная калибровка компаса либе наводки на компас (металл, магнит, ВЧ от HD-камеры)
Компас развернул на 270 градусов и откалибровал на улице.
А адеквастность работы после всего этого проверяли? Поставить на землю, поворотом добиться “севера” по OSD или телеметрии, проверить на совпадение с реальным севером, повернуть на восток, юг, запад и проверить получающиеся азимуты (90-180-270). Если крутятся не в ту сторону - нужен flip в параметрах ориентации компаса. Если сдвиг на “кратно 90” - опять же поправить его в параметрах ориентации. Если показания неадекватны - разбираться с наводками от “железа” или ВЧ.
P.S. Одновременные альтхолд и позхолд не имеют смысла, так как в 2.х.х позхолд включает в себя альтхолд (доки читать надо!).
Проблема может быть связана с тем что компас прикреплен к раме под углом?
И еще у меня не включен режим стабилизации( есть только акро и горизонт).
Собрал и настроил квадрик. Полетник Matek 405ctr работает под Inav2.1.4. GPS
Радиолинк TS100. Квадрик без проблем летает в режиме акро и горизонт. GPS ловит 10-12 спутников. В режиме ALTHOLD и POSHOLD квадрик вообще не держит позицию, улетает резко вбок. Компас развернул на 270 градусов и откалибровал на улице. В чем может быть проблема?
Жпс модуль надеюсь на стойке не менее 10 см от рамы?
Горизонт тоже стабилизация.
И как вы представляете себе альтхолд в акро? 😃
Жпс модуль надеюсь на стойке не менее 10 см от рамы?
Это необязательно. У меня на тестовой змрке модуль приклеен на скотче к верхней палубе между hd-камерой и аккумом, а компас (отдельный модуль) также на скотче приклеен к “брюху”, где прекрасно заэкранирован карбоном двойной нижней палубы от помех электроники и “железа” литионных банок.
От магнитной составляющей карбон не защитит.😃
И как вы представляете себе альтхолд в акро?
ви таки же будете смеяться, но он работает.
Очень страшно и “неожиданно”, но работает
Ребят посоветуйте.Настроил ПИДы на квадрике,прошивка 2.0. Как летает в принципе нравится.Настраивал по видео гайду “май хобби лог”. Смущает только одно,есть мелкая тряска по питчу. Особо заметна в ветер .Тут уже видимо нужна тонкая подстройка.Поскажите,при такой мелкой тряске,что и куда подкрутить можно ?
ви таки же будете смеяться, но он работает.
Очень страшно и “неожиданно”, но работает
Я не сомневаюсь, что он пытается работать - я как раз и имею в виду непредсказуемость работы а этом режиме. 😁
От магнитной составляющей карбон не защитит.😃
И тем не менее - именно при таком варианте компоновки компас начал работать стабильно. А вот встроенный в bn-880 и находящийся на pla-площадке, вынесенный на 8 см на нейлоновых стойках, глючил что при смене аккума с липо на литион что при включении hd-камеры.
непредсказуемость работы а этом режиме.
это даже трудно назвать непредсказуемостью - пока коптер более менее в горизонте, то все ОК.
но если дать газу и сделать флип, то, как только коптер оказывается вверх ногами, айнав дает газу, и аппарат не просто падает, а долбит планету и сверлит ее.
По идее, то же самое будет и при попытке флипа в horizon+althold - ну тут уж против странных желаний пилота автопилот бессилен, он честно отрабатывает то, на что запрограммирован. 😁
честно отрабатывает то, на что запрограммирован.
ну херово запрограммировали.
если коптер перевернут вниз головой, надо не газу давать, а просто ничего не делать хотя бы.
ну херово запрограммировали.
“Дело было не в бобине” 😁
если коптер перевернут вниз головой, надо не газу давать, а просто ничего не делать хотя бы.
В режиме акро показания акселерометра не используются (его можно вообще отключить) - так что аппарат не знает куда он там “головой”.
Я просто толсто намекаю, что нефиг включать альтхолд параллельно с “пилотажными” режимами (акро и горизонт) и наивно полагаю, что вы не из тех пользователей, для которых в инструкциях пишут “микроволновка не предназначена для сушки домашних животных” 😉
В режиме акро показания акселерометра не используются (его можно вообще отключить) - так что аппарат не знает куда он там “головой”.
Ну так пусть используются в альтхолде.
Я просто толсто намекаю, что нефиг включать альтхолд параллельно с “пилотажными” режимами (акро и горизонт)
Понятно, что сочетание некоторых режимов просто абсурдно, но тем не менее каждый режим должен проходить минимальное тестирование на тупизну.
Например, функция, которая делает в строке первую букву заглавной, должна сначала проверить, не пустая ли строка вообще.
Ну и вот есть функция, которая удерживает высоту. Коптер падает? Надо дать газу. А что, если коптер перевернут? Все равно дать газу? Зачем? Если незачем, соответствующее поведение нужно запрограммировать.
Ну и вот есть функция, которая удерживает высоту. Коптер падает? Надо дать газу. А что, если коптер перевернут? Все равно дать газу? Зачем? Если незачем, соответствующее поведение нужно запрограммировать.
подозреваю, что все просто - чтобы наладить логику этого режима, нужно написать километры кода, для которого нужно убить время и выделить место.
а пользоваться этим будет… никто
Ну так пусть используются в альтхолде.
Альтхолд - не самостоятельный режим, а “опция”. Акро - основной “базовый” режим.
Ну и вот есть функция, которая удерживает высоту. Коптер падает? Надо дать газу. А что, если коптер перевернут? Все равно дать газу? Зачем? Если незачем, соответствующее поведение нужно запрограммировать.
Кому “надо” альтхолд в акро - тот пускай под себя код прошивки и пишет. Думаю, такие оригиналы только в Красной книге встречаются. 😃
Максимум в плане “защиты от дурака” можно было бы попросту игнорировать включение альтхолда в режимах акро и горизонт. Но, полагаю, и в этом случае найдутся “недовольные” 😁