Собираем разбираем краши/отказы коптеров

Даже небольшой отказ в электроники в воздухе весьма неприятен для коптера.
1 XАircraft Х450 в стандартной конфигурации, аппаратура futaba 9c с модулем спектрум, приемник AR7000 с сателлитом.
2 На удалении 150м и высоте 50м на секунду отключились моторы, в результате не запланированная бочка. Повреждений нет сел штатно.
3 Возможно приемник словил фаилсейв, хотя на земле проверял на расстоянии 1.5км по прямой связь была нормальной.
Бренд приемника и ВЧ части
Turnigy 9X. ВЧ-блок нормально работает. Приемник разобрал, внутри ничего не отвалилось. По шине обмена данными между EEPROM и процессором ничего не идет. Возможно, после удара микротрещины возникли в чипах. Либо он вырубился в полете. Плюс расстояние большое, видимость не особо, отсутствие опыта. Заказал FRSky, делаю “АрдуКоптер порт на Ардуино” с GPS, сонаром и прочими плюшками, чтоб само летало)
MK квадрик, нави, компас, gps.
Находился в режме pos. hold, на приличном удалении затем gps переклинило и квадрик стало сносить в сторону. При включении возврата домой квадрик наклонился еще сильней и скрылся из виду. Был найден метрах в 500 от точки взлета - 2 винта на выброс и антенна ру.
Причина досих пор не выяснена.
МК коптер в конфигурации квадро, аппаратура HITEC ECLIPSE7 , версия платы MK 2.0 (самоделка) под гиры ADXRS610 - при проверке на компе всё ок! Регуляторы самодельные, но подтяжка шины I2C как в оригинале у немцев, на плате полётной по 1Ком, на регуляторах подтяжка портов по 100Ком, платы заказал на производстве - покрытие на платах иммерсионное золото.
11 полётов по 30 минут на отлично, на 12 полёте было подвисание на высоте пару метров, затем падение (упал удачно в снег). Причина сразу не обнаружена. На следующем полёте повтор, причём при сбросе газа и снова при увеличении тяги глюк пропадал. Начал разбираться, всё перепаял, переткнул. Затем обнаружил, что кончился один из подшипников двигателя DT-700. Подшипник заменил, пока летал хорошо.
Затем пробовал активный полёт, в меню МК-тоол включил мёртвую петлю, но забыл отключить акселерометр - итог раздолбанный в дребезги квадрик. После выполнения переворота он гад сам дал полный газ и тут же отрубил движки…
Так карьера пилотажника на долгое время закончилась.
Собрал новую раму, новые регуляторы на платах с той же серии, летал пока нормально, но в одном из полётов резкий кувырок, полная остановка и клин мотора. (поломал один винт), затем несколько полётов нормально и опять переворот…
Причина: - отвалилось иммерсионное золото от меди на плате одного из регуляторов, после изучения под микроскопом понял что покрытие - полное “г…но”. Сделано в прямом смысле халявно, я смог спокойно оторвать вывод дросселя в этой плате регулятора, хотя припаян вывод сверху был добротно. Плохая технология видимо и стала причиной отказа.
Аппарат переделал в гексу.
Развёл новые регуляторы, заказал платы с лужением ПОС-63 у другого производителя, пока проблем нет. НО если честно боязно уже, боюсь летать в людных местах. Вдруг на человека упадёт…
Ещё в плате 2.0 немцев переделал подтяжку I2C. Пока ошибок шины в терминале нету. В полётной плате по 10Ком, далее 100 ом последовательно и на каждом регуляторе 27Ом последовательно и по 12ком подтяжка, шина не перегружена. Ввёл источник опорного напряжения на основе AD780 вместо шатного “г…на”, теперь напряга держит 3.005В стабильно… (это тракт Vref)
21-ого июля 2011 летал в зоне работы РЛС аэропорта Саратов ( около 2 км от РЛС на малой высоте 20 метров), хотя не знаю работала ли РЛС или нет, нечем было регистрировать, но гекса отлетала без сбоев. Проверял специально на глюки.
p.s Сейчас в связи с этими крашами, а также с жалобами пользователей по МК решаю вопрос о выборе другой начинки, и параллельно в команде ведём работу по разработке своего ПО с управлением по шине CAN, I2c на ARM с поддержкой GPS, барометра, телеметрии, сопроводительно софта, наземной станции. Время покажет.
а что за жалобы на МК? А то мы часто МК боготворим, может зря? 😃
Если честно, то в родном МК тракт I2c типа самопальный, в атмеге реализован некорректно. Это мне объяснил человек, который очень много времени провёл над переделкой и доработкой программы и электроники МК. В нашей команде тоже при попытке подружить ARM и AVR были ошибки по шине I2c, пришлось полностью переписывать софт… но пока в стадии отработок и испытаний.
А так у шины I2c немцев есть большой касяк - при зависании любого регулятора виснет вся шина. Попытку это исправить впервые применил Расти с форума РЦ групс - это применение защиты на основе LTC4304. Я себе тоже опробовал - реально при зависании или подвешивании шины (SDA и SCL) на землю - LTC отрубала этот тракт, остальные не висли, аналогично работает горячее включение выключение регуляторов. Но не работает кз SDA на SCL (друг на друга) - виснет вся шина, так что как и говорил Расти защита помогает не во всех случаях. Да и микруха LTC4304 дороговата - 4 евробакса за штуку. Мы у себя переделали немного протокол шины I2c - теперь можно производить горячее включение выключение без защиты - шина перезагружается за 20мс и аппарат не успевает даже слегка дрогнуть. Но как говорил выше пока всё на стадии испытаний и проект будет коммерческий. Задачу ставили чтобы “мозги” аппарата и исполнительные механизмы не отказывали никогда - слишком дорог ремонт мультикоптеров, и люди пострадать могут. А многие уже МК для съёмок на свадьбах используют где сами понимаете народу тьма и падать некуда.
А так мне МК нравится, хоть и с детскими болезнями.
Сейчас для работы на зрителя делаю мозги с управлением по PPM протоколу, чтобы вероятность отказа минимизировать… это всем известный КуК, но и по нему вопросы есть. Это уже в другом разделе опишу.
Виктор Vis с форума multicopter.ru (ветка обсуждения) тоже занимается своей системой на ARM, судя по видео, летает аппарат у него мегастабильно:
Спасибо за ссылку, я там зарегистрирован, так что слежу внимательно за всем. 😉
p.s Народ, а ещё кто что про МК напишет? А то действительно разговоров много про отказы… а денег МК много стоит.
p.s2 На том же форуме мультикоптер полно сообщений по крашам, но статистика не ведётся…
квадрик с фишкой 90, при взлете дал полный газ и улетел восвояси, думал фишка- оказалось у футабьего приемника отвалилась антенна. приемник заменил, больше тьфу тьфу не повторялось
А как нашли? Он же на полном газу фиг знает куда улететь может. Или маяк стоял?
У моего друга собран коптер с форума аиркам.ру, версия платы - та что перед Xavr была. Передатчик у друга Турниджи на 2.4гц ( модель с дисплеем), ну и более менее отрегулировав и потренировавшись дома друг запустил аппарат на улице. Итог - коптер в открытом поле начал набирать тягу и устремился в сторону держа горизонт, затем немного тягу сбросил и как бы завис, т.е такое ощущение будто летел по барометру, в итоге нашли коптер почти в километре от точки старта. Он пиликал моторами… Причина неизвестна, я сначала предположил что он барометр включил при старте, но оказалось нет… Аппаратура тоже нормально работала, отказа по связи не было. На следующей неделе в выходные будем опять пробовать поднимать.
Виктор Vis с форума multicopter.ru (ветка обсуждения) тоже занимается своей системой на ARM, судя по видео, летает аппарат у него мегастабильно
Судя по видео, висит на уровне новой Гайки, ну может чуть хуже )))))))))))))))))))))))))))))
p.s Народ, а ещё кто что про МК напишет? А то действительно разговоров много про отказы… а денег МК много стоит.
Да ХЗ что писать, у меня квад пару раз падал в начале, но я думал о нарушении контакта между регулем и движком, зафиксировал термоусадкой сверху. С тех пор падаю только по собственной глупости.
А я сегодня решил в Питере парк (у СКК) снять повыше, на камеру #11. Аппарат - гайка 330, ветер не очень сильный, но чувствуется. Передатчик - Futaba 2.4Ггц, приемник Orange RX.
Итак, загоняю квадрик повыше, уже и лучи плохо видно, высота метров 50 наверно, но недалеко от себя, тут чувствую что квадрик не слушается управления, а еще через 1-2 секунды со все возрастающей скоростью летит вниз. От удара выскочили все 4 движка, камера #11 больше не включается, также в минус - все 4 пропеллера, плюс раскололся корпус на мозгах. Корпус мозгов склеил, пропеллеры дело наживное, а вот что было - хз. По ощущениям, похоже на потерю сигнала, но почему понять бы причину.
Из того что приходит в голову:
- Антенну передатчика (2.4) я забыл повернуть вертикально, она так и стояла боком. Могло ли это сильно повлиять на уровень сигнала?
- Летал почти над головой, не помню диаграмму направленности штатного штыря, может попал в мертвую зону, хотя хз
- Усы приемника торчали оба вбок, хотя рекомендуется под 90 градусов, но никогда не заморачивался с этим на квадрике, думал что на таких дистанциях разницы никакой. Могло ли повлиять затенение от корпуса/аккума?
- Парк в городе, может диапазон 2.4ГГц более сильно загажен чем в поле. Хотя до домов вроде было не менее полукилометра.
После всего такого, не поняв причину, страшно на квадрик хорошие камеры вешать, ладно гайку не особо жалко, а был бы более дорогой аппарат…
С антенной у Вас всё нормально было, мертвая зона над штырём. Я бы грешил на приёмник, т.к. если пропадает приём, оранж держит теже обороты, при восстановлении связи они не меняются. Могли конечно и мозги съехать.
Я failsafe в передатчике отключил, а в приемнике на “0” настроил, т.к. начитан уже историй с оранжами, как модели улетали 😃 Лучше уж пусть упадет, чем улетит…
Мозги у Гайки простые но надежные, случаев их глюков я не слышал, так что 99% все же потеря сигнала, но вот почему, хз. Может банально затенение антенны корпусом/аккумом, фиг знает.
Вчерашний стресс. Так толком и не понял почему упал. Отделался легким испугом.
сегодня решил полетать с новой прошивкой 1.8
понравилось, на лету брал коптер в руки и швырял, летел стабильно
и так несколько раз, прошивка конечно радует
в последний момет швырнул его повыше, но как то не сообразил в какую сторону его накренило, и еще больше дал крен, в общем влетел я в железный забор прямо мотором (не помогла мне рама с защитными лучами и шасси, весь удар прошел мимо них), вот результат
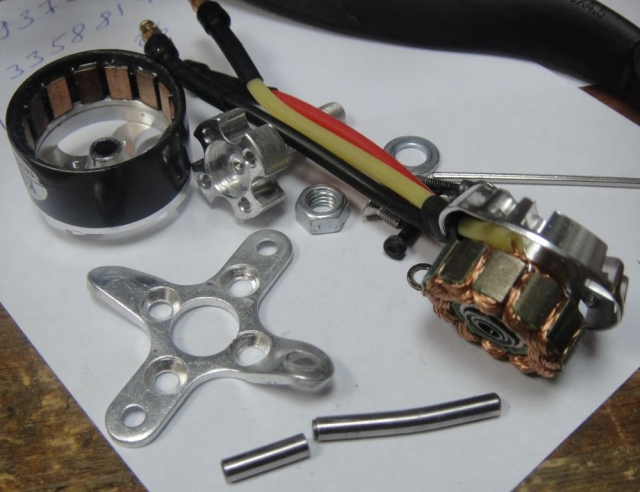
походу мотору кабздец
пошел заказывать новый…
ох, на месяц полеты закончились 😦
через пару дней придет вал, возможно починю, хотя вряд ли с такими повреждениями
Вот тут я уже писал про краш своего квадрика на базе FY90Q rcopen.com/forum/f123/topic215193/131
но продублирую сюда для общей коллекции.
В общем пришел к выводу, что взлетел с легка поврежденным мотормаунтом от Пираньи, который надломился во время полета, что и привело к падению
Мотормаунты штука хорошая, но оказалась уж слишком хрупкой, все поломал при незначительных ударах.
Советую ознакомится и не говорите потом что не читали rcopen.com/forum/f4/topic244298
Я failsafe в передатчике отключил, а в приемнике на “0” настроил, т.к. начитан уже историй с оранжами, как модели улетали
Можно поподробнее?
Отказ аппы TurnigY 9X со стоковой прошивкой, Y4, КУК, КУК активировал всё как положено даю газ потихоньку никаких реакций, пытаюсь дезактивировать КУК нет реакции, кидаю взгляд на аппу пишет на дисплее пожалуйста подождите (на английском естественно), тут же аппарат заводит все движки на максимум подскакивает - кувырок и со всей дури в планету - и ревёт движками как беженый в землю роется (на аппу никак не реагирует) кое как подобрался батарейку сдёрнул, итог 2 подшипника все четыре пропа погнутые валы и т.п. КУК не пострадал. АППА сбросила все настройки в дефаульт все модели с названиями и т.п. естественно и расходы и реверсы 😦