Собираем разбираем краши/отказы коптеров

В общем гекса с такими моторами со взлетным весом 3.400, с грузом 3.200 … мне кажется, Вы что-то напутали с расчетами. Если калькулятор говорит, что можно нагрузить 3400 то это не значит, что еще можно на него повесить этот вес. Вроде как расчет оптимальный это газ 50% и сколько он может на таком газе поднять вес, а не пиковый в 2 кг к примеру. Если мотор на 50% газа тянет 600гр то для гексы вес всего коптера со всеми потрохами будет оптимальный 3600гр. А Вы подняли 6600гр и , ясен пень, моторы были в ахуе и перегрелись. /Даже, так понял, регуляторы даже выдержали такую перегрузку.
а что за мотор кстати?
В “перекал” можно моторы для самолета расчитывать. Там макс нагрузка только на взлете, в полете она не достижима. Для коптера моторы должны быть расчитанны в 0 “макс ток соответсвует макс - газу” желательно даже “продолжительному” а не “до 15 сек”. Регуль с 20% запасом минимум, а лучше с 50.
ясен пень, моторы были в ахуе и перегрелись. /Даже, так понял, регуляторы даже выдержали такую перегрузку.
Ну не знаю. Вы хотите сказать если я нагружу свой коптер так что он не сможет взлететь то моторы должны сгореть? Ерунда какая-то.
У меня коптер по несколько минут на 100% газа летает и нечего не горит.
Я считаю неверным то что моторы от этого горят. Такое может произойти если моторы или регуль неисправны, или если их пиковая мощность на пределе, то-есть максимально допустимый *S банок. Если конечно автор сгоревшего мотора так сделал то мне нечего сказать. Аппарат нужно рассчитывать на все режимы в том числе и максимальный, что-бы движки при полном газе не нагревались выше 40-50 градусов.
Вот табличка мотора 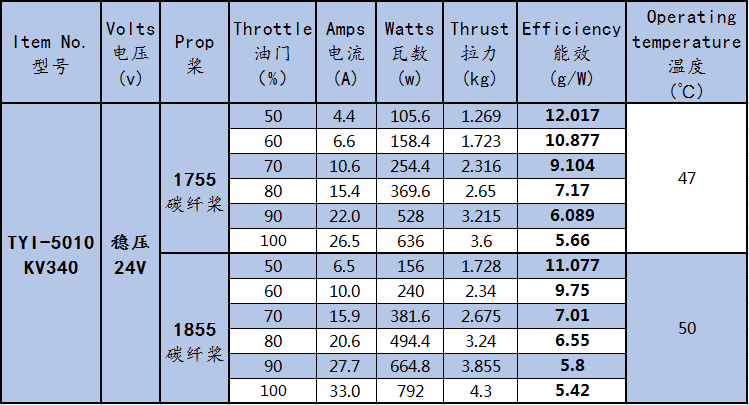
Посмотрите, как по букварю 3.200 + 3.400 + 2х2.000 = 10.600
10.600 / 6 = 1.76кг на мотор
Что соответствует 50-51% от заявленной производителем тяги.
по амперам регулей нечего даже говорить стоят xrotor 40a
ну да… вроде тяги ОЧЕНЬ МНОГО! Закоротило тогда/ остается…
Добрый день. Кто знает почему коптер летит в перед со снижением? Как добиться ровного полета, что бы он не проваливался по высоте? Контроллер НАЗА.
Как добиться ровного полета, что бы он не проваливался по высоте? Контроллер НАЗА.
Поддавать больше газу.
А если в режиме удержания высоты то накрыть барометр губкой и сам контроллер защитить от попадания встречных потоков воздуха.
Поддавать больше газу.
А если в режиме удержания высоты то накрыть барометр губкой и сам контроллер защитить от попадания встречных потоков воздуха.
Не встречал на форуме, что бы НАЗУ в паралон закутывали. Это больше к АПМу относится. Но я все ревно заткнул все щели. Разници нет. В перед летит со снижением, задом летит ровно. Так же в право со снижением, в лево ровно.
Добрый день. Кто знает почему коптер летит в перед со снижением? Как добиться ровного полета, что бы он не проваливался по высоте? Контроллер НАЗА.
гейны по вертикали добавь. Или выведи их на крутилки и крути их.
гейны по вертикали добавь. Или выведи их на крутилки и крути их.
Гейны добавлял. Доводил их до максимума. Коптер начинает себя не одекватно вести, а высоту при полете так и не держит.
Вы хотите сказать если я нагружу свой коптер так что он не сможет взлететь то моторы должны сгореть? Ерунда какая-то
Почему ерунда? Никогда не смотрели видео, как моторы горят на стенде под максимальной нагрузкой?
Никогда не смотрели видео, как моторы горят на стенде под максимальной нагрузкой?
Нет но вижу надо, вообще что-бы надежный квадрик был надо рассчитывать все с запасом а не в притык, это не автомодель где сгорит движок да и фиг с ним, тут будет фарш…
Решил из остатков коплектухи собрать дешёвенький коптер. Но видать после зимней спячки никак проснуться не могу. То не так моторы подключил, то пропеллеры местами перепутал, но в итоге удалось взлететь пару раз.
Первый раз взлетел на стоковых пидах inav’а, колбасит жуть, стал преземляться коптер перевернуло на земле, сломал один проп.
Подкрутил в меньшую сторону пиды на 5 едениц.
Пошёл опять тестить, взлёт в принципе не плохой, но почему-то газа надо было дать много.
Взлетел, стал потихоньку газ опускать, коптер заколбасило и перевернуло.
Сетап конечно фуфел, но тем не менее, на таких я видел летают лихо.
SP F3 Acro
Baro BMP280
Регули XXD 30A
Моторы XXD A2212/T10 1400KV
Пропы Gemfan 8038 разлетаются в щепки)
Рама F330
Т.к. на раме нет отверстий и стоек, контроллер в корпусе приклеен на двухсторонний скотч и затянут тремя стяжками.
С пидами не дружу, по этому хз что крутить и на сколько.
Здравствуйте, имеется вот такая конфигурация 650 рама, 3508 700 kv gartt,регули 40 А, naza v2, летал раз 20 все было нормально, но последний раз появились звуки странные и коптер начал себя вести странно прибавил газу и все выровнялось сел нормально, при проверке дома все вроде работает без посторонних звуков моторы холодные регули чуть теплые, определить неисправность не смог, может по звуку кто подскажет?my.mail.ru/mail/a.kaldin/video/_myvideo/2.html
Парни, всем привет!
Помогите найти причину регулярных RX LOSS . Пульт Таранис Плюс. Прошивка свежая, ВЧ прошивка для Америки. Приемник X4RS REV 1.1 , так же прошит под Америку.
За 107 вылетов уже раз пять ловил потерю сигнала. Два раза она восстановилась. 3 раза падал. RSSI в момент отказа был от 49 и выше. Вчера поймал предупреждение всего в 30 метрах от себя.
Конкретно это падение, что на видео, произошло на удалении не более ста метров.
Повезло, упал вообще без болезненно! Даже пропы не погнул и не сломал и батарея не выдернулась и не сместилась. Упал вверх ногами плошмя. На видео слышно как раскручивались пропы от авторотации, что видимо и погасило часть скорости и смягчило удар об мягкую землю и короткую траву. Подошел, осмотрел, проверил на наличие повреждений и полетел дальше! Еще два аналогичных отказа случились на высоте около метра, так что тоже пережились лишь испугом. Но это начинает напрягать и пораждает недоверие к технике.
Куда копать и что проверять? Провода спаяны надежно. Разъемы все зафиксированы термоклеем, платы покрыты силиконом в два слоя, в том числе и приемник. Может ли быть виноват сам Таранис? Был случай, когда при очередной замене батареи на следующую, включаю пульт, подключаю питание квадра, а он начинает пищать, будто потеря сигнала, как при фейлсефе. Выключаю и снова подключаю питание квадра - тоже самое. Тогда выключаю питание квадра и выключаю пульт, включаю все заного и ничего не пищит. Отлетал батарею без проблем.
KAIMAN
По таранисам лично не скажу а вот косяки с контактами стоит проверить, даже сами антенны стоит посмотреть, может где-то залом например, у моего коптера так было, антенна почти сломалась, вовремя заметил место надлома.
У меня на турниге модуль передатчика FrSky сидел с зазорами и от тряски иногда отходили контакты. На таранисе тож болтается, но вроде контакт не теряется.
Народ, нужна ваша помощь.
Полгода назад собрал два почти одинаковых сетапа.
Рамы 110 и 145.
Airbot Ori32 + Airbot Nano V6 + Caddx Turtle V2 + AKK FX3 + Micro DSM2/DSMX
Летал на них всю зиму без проблем.
Пару недель назад словил RX LOSS в 100 метрах от себя на 145.
К счастью failsafe сработал адекватно. Даже ничего ремонтировать не пришлось.
Сегодня опять словил RX LOSS, но на 110. В 80 метрах от себя.
Уже не так удачно. В море. 😢 Минус регуль, минус полетник. 😢
В общем эта проблема меня сильно напрягла. 😃
В какую сторону копать?
Прошивка, приемник?
Читал, что начиная с BF 3.0.0 появились глюки со спектрумовскими приемниками.
Даже на youtube нашел пару видео с RX LOSS.
Неужели это так?
Кто-нибудь сталкивался с подобным глюком?
Прошивка 3.3.0. Передатчики DX7 gen2 US Version, DX6 gen3 US Version.
UPD.
Видео с крашем:
Добрый день. Помогите выяснить причину краша.
С пяти метров начал терять высоту, тяга на полную - не вытянуло, хотя напряжение было ещё около 10 вольт. Подозрение или на батарею или на АПМ. tlog прилагаю, краш после 80%-го процента.
ТТХ такие, APM, вес 1300, моторы 920kv, пропы 1047, аккум 3s4p Samsung INR18650-35E 3450mAh - 10A.
Судя по логам, ампераж в пиках доходит до 50, это нормально?
50А при напряжении 10в…м.б. и АКБ…но х.з.,меня iNav или АКБ вчера то же впечатлили…примерно похожая картина,но сел благополучно.
Пару недель назад словил RX LOSS в 100 метрах от себя на 145.
Да легко, у меня на frsky XSR приемнике связь рвалась уже на удалении в 30 метров. Зависит от локации, расположения антенн приемника/передатчика. Для проверки дальности лучше выехать куда-нибудь за город где диапазон 2.4 ГГц не так сильно забит.
Проверяйте хорошо ли затянута линза курсовой камеры, перед установкой на коптер.
А то я не проверил, получился упс…
Всем добрый день.
Вчера разбил свой дальнолет. Может кто подскажет по видео, что могло случиться. Сам пока склоняюсь к тому, что с гирой что то случилось.
Сначала летел прямо, потом заметил, что кренит влево, развернулся, начал снижаться, в метрах 30 от земли чуть поддал газку, в результате краш.
Не укладывается в версию с гирой то, что когда начал кувыркаться линия горизонта тоже начала положение менять вместе с землей… Да и перекос не настолько большой был, чтобы его в пике отправить
В общем, ум на раскоряку, и черный ящик без файлов оказался 😦
У меня такое было из-за просадки АКБ,еще варианты:может где плохой пропай контактов,сверить настройки всех регулей,осмотреть пропы,сильнее затягивать пропы,вибрации (даже небольшая трещинка в основании маунта GPS может сводить с ума пооетник),помехи от мощных передатчиков в виду плохой настройки антенны (были удивительные глюки) АПМ и Naza более устойчивы к большинству недугов в сравнении с iNav. И ещё раз ,если iNav,он особо чувствителен к вибрациям,НИЧЕГО НЕ ДОЛЖНО КОЛБАСИТСЯ НА БОРТУ! -рано или поздно даст о себе знать.
Не покупайте самые дешевые компоненты,намучаетесь,они портят хобби первое время сам сильно мучался,но когда пересчитал потраченные время…оно не стоит того.
…500м помехи,странный долголет,не проще mavic или simu 8 взять? По мне,долголет это от 10ки км.
…500м помехи,странный долголет,не проще mavic или simu 8 взять? По мне,долголет это от 10ки км.
Помехи появились когда повернулся к точке взлета, в этом положении стойка GPS т.к расположена не высоко и с экраном, у меня может перекрывать антенну видео.
Просадки по напряжению не было- стояли 2 li-ion сборки, да и летел спокойно. Передатчик на 400вт стоял, не думаю, что в нем дело, антенна Foxeer. Комплектация не самая дешевая и не самая дорогая, ПК Matek f405 ctr, моторы racestar 2207-1600kv, регули littlebee 30a. На 3,5км связи хватает с X8R. Рама 283мм, 7 пропы. Так что для меня он больше долголет. Пропы все были затянуты. В настройки регулей лез только когда вращеие менял у 2 моторов , остальное все по умолчанию.
Насчет непропая - буду смотреть… заметил особенность, что глюк с гирой вылезает если до этого уже активно полетал. Такое ощущение, что что то пререгревается и начинает глючить. На холодную все нормально всегда было.