Проблема с калибровкой ESC c контроллером APM 2.8

Приветсвую сообщество!
Хочу предложить обсудить проблему, возникающую довольно у многих при калибровке регуляторов в связке с контроллером APM 2.8
Прежде чем выкладывать здесь свои исследования этого вопроса, я по максимуму изучил информацию на наших и зарубежных форумах, списывался с производителями контроллеров в ESC и автором прошивки г-ном Simon Kirby.
К сожалению, решить проблему не удалось.
Если у кого-либо была подобная ситуация, есть конструктивные идеи, либо есть решение проблемы - прошу отозваться.
Проблема калибровки ESC c платой APM 2.8
Отключите гироскоп. Вы же на столе проверяете, контроллер “хочет” “выровнять” коптер.
ОПС! Первое сообщение! Сапасибо. Мысль - конструктивна.
- Как отключить?
- А разве калибровки компаса/акселлерометров/GPS в неподвижном сосотоянии - не гарантируют работу моторов?
Геннадий, тема достаточна специфична. А если я предложу обсудить в личной переписке, а потом обнародовать результат? Мне кажется, что пользователей APM 2.8 очень мало осталось, особенно тех, кто копает глубоко
Я его не только “на столе” 😊
Стенд - ГЕКСА
Тахометр подтвердил - обороты моторов отличаются офигительно!
Хорошо, хоть на поле не потащил модель.
А те, кто не проверяя потащил - наблюдали чудесный “кувырок”
а с чего вы взяли, что обороты должны быть одинаковы?апм пытается выровнять коптер, вот и меняет обороты, а так как вы к нему табуретку привязали, то обороты большие, а взлететь не может
Геннадий, тема достаточна специфична. А если я предложу обсудить в личной переписке, а потом обнародовать результат? Мне кажется, что пользователей APM 2.8 очень мало осталось, особенно тех, кто копает глубоко
У меня нет и никогда не было АРМ,
собственно говоря у меня и квадров никогда не было,
просто я знаю логику работы полетных контроллеров.
Еще со времен полетов на вертолете.
Если полетник считает, что положение модели отличается от “номинального”,
он будет стремится модель привести к “номинальному”.
Различие в оборотах моторов не является показателем не правильной работы полетника.
В общем совет, заканчивайте с экспериментами “на табуретке”
и попробуйте “по маленьку”, никуда не спеша взлететь.
- Как отключить?
теоретически должен быть режим MANUAL, но есть ли он в Вашем ПК я не в курсе
А те, кто не проверяя потащил - наблюдали чудесный “кувырок”
у Вас через один мотор, так что “кувырок” просто исключен
- Да я и собрал эту приблуду, чтобы без травм настроить гексу! А первый раз на полу она ТАК рванула вперёд - пришлось хватать за лучи - по пальцам пропом получил.
- В квадрокоптерах невозможно “отключить гироскоп”. Это не самолёт и даже не вертолёт, которому и одного гироскопа достаточно. В АРМ 2.8 стоит 3-осевой гироскоп + 3-осевой акселерометр + магнитный компас + бародатчик. И если хоть что-то отключить - тогда лучше и не взлетать.
- Логику работы полётных контроллеров (моего и вертолётных) я тоже изучил неплохо. Но мне нужен совет опытного пользователя АПМ, а не тех, кто “АПМ-а не было, квадрика не было, но я СЧИТАЮ…” Уж извините за прямоту.
Вы видео с “тренировочным шасси” видели? Вес коптера - около 2 кг, вес этого “паука” - 1300 г. Расчтная полная тяга копитера должна быть около 4 кг. А он на полном газу даже приподнять этот “паук” не может, плюс - сильно кретин впереёд. И Вы тоже хотите предложить мне взлетать? 😊
А на видео из первого поста как моторы управляются? От радио?
А какое поведение моторов при нажатии кнопки Test all motors (на вкладке Motor test)?
- А первый раз на полу она ТАК рванула вперёд - пришлось хватать за лучи - по пальцам пропом получил.
ОФИГЕТЬ, ДАЙТЕ ДВА.
Это как же надо себя не любить, что бы в квартире гексу пытаться поднять.
Я 120 вертолет только через пол года полетов на улице рискнул поднять и повисеть в квартире,
а полетать между комнатами так и не решился.
- которому и одного гироскопа достаточно.
Вы плохо себе представляете современные “мозги” вертолетов.
Вы видео с “тренировочным шасси” видели?
видел. и в том видео я не наблюдаю стремления к опрокидыванию
кроме того, что такое “рассчетная тяга”, как Вы ее рассчитали,
Как Вы например учли реальный рейтинг АК и реальную мощность Китайских моторов?
а кроме того, при весе квадра 3300, надо тяги иметь минимум пять килограмм.
- Но мне нужен совет опытного пользователя АПМ, а не тех, кто “АПМ-а не было, квадрика не было, но я СЧИТАЮ…”
ок, удачи в поисках.
Михаил, а прочитать внимательно мой первый пост и внимательно посмотреть картинки ПЕРЕД ответом - это Вы сделали? Там есть картинка - “Мотор Тест 100% 30 секунд”
Отвечаю по порядку.
- Там не видно, что я живу в Одессе? Это не та Одесса, что в Америке, это - в Украине. И за включение радио и полёты - можно очень прилично огрести… И я уже однажды огрёб.
- Я настраивал 4 вертолётных полётных контроллера - V-BAR Turnigy 600, KDS Fly Mentor, Align 3GX, Tarot ZYX-S2 и Ardu Heli на этой же плате. Второй - стоит у меня на вертолёте 450, 3-й и 4-й - летают у друга. Причём я настроил Тарот на бензиновом вертолёте 26 сс с ОБРАТНОЙ схемой автомата перекоса (тяга элеватора - впереди). А вот от вас внятных технических советов я что-то не слышу.
- Тягу я рассчитывал на известном сайте Есть телеметрия QUANUM для замера напряжения и тока батареи. Есть оптический тахометр для замера RPM. Я разве писал, что вес гексы (не квадра !) 3300 ? Я вроде писал - около 2 кг.
- Спасибо за сообщения, но… ээээээээ… и Вам удачи!
- Там не видно, что я живу в Одессе?
а я должен был посмотреть ?
- Я вроде писал - около 2 кг.
вес этого “паука” - 1300 г.
~2000 + ~1300 = ~3300
- Тягу я рассчитывал на известном сайте
eCalc дает весьма условный результат, исключительно для предварительной оценки.
практика показывает, что реальные результаты (на самолетах) могут отличаться до 10 процентов в обе стороны)
- А вот от вас внятных технических советов я что-то не слышу.
внятный технический совет я Вам дал, повторю
на видео отсутствует склонность с нырянию Вашей мульти-роторной системы (так пойдет ?),
пока она “привязана с стулу” смотреть на обороты моторов дело пустое,
просто потому, что мозги стремятся привести “мульти-роторную систему” в только им известное положение.
Михаил, а прочитать внимательно мой первый пост и внимательно посмотреть картинки ПЕРЕД ответом - это Вы сделали? Там есть картинка - “Мотор Тест 100% 30 секунд”
В вашем первом посте вообще не понятно что за проблема и какой вопрос.
При нажатии мотор тест - все оутпуты одинаковые. Так и должно быть.
При газе 100 процентов - все оутпуты разные. Это тоже нормальное поведение квадрокоптера. Будучи привязанным он пытается выровнять свое положение. В бетафлае аналогичное поведение.
Но это если моторы в нужную сторону вращаются. Проверьте.
Мне показалось что мотор 2 вращается не правильно.

- Я думал, что Одесский маяк на моей аватарке знают все. 😊 Если был излишне самоуверен - у всех прошу прощения.
- Программы, лучше eCalc (для коптеров), я не нашёл. До этого все свои модели (более 20) просчитывал в лицензионной версии Motocalc - весьма точно получалось.
- Я нежно газую на этом “пауке”. Но замеры RPM На полном газе (рук не хватаем, чтобы и управлять, и снимать, и замерять) показали - разбег по моторам составил 3600 - 6400 об/мин Максимум был на обоих передних.
- У меня схема HEXA X , нумерация моторов у меня вот такая
- Для интересующихся - вот расчёт и для LiPo 4S, и для Li-Ion 4S4P
- У меня схема HEXA X
На ваших картинках видно что моторы 1,3 и 5 увеличивают обороты а моторы 2, 4 и 6 уменьшают. значит контролер пытается остановить вращение квадрика по вертикальной оси. Причина вращения может быть в том один из моторов вращается в неправильном направлении.
Посмотрите на правый мотор на видео. Это мотор номер 2? Он должен вращается по часовой.
- У меня схема HEXA X
Посмотрел повнимательнее. Не важно какая схема. Они имеют одинаковое вращение моторов. Проверьте мотор номер 1.
Михаил, спасибо за долготерпение! Проверю и сделаю видео.😊 Но, всё же позвольте вопрос? А то, что на стенде моторы не набирают 100% оборотов при 100%-м стике газа - к этому как относиться? Это тоже норма? Не понимаю…
А то, что на стенде моторы не набирают 100% оборотов при 100%-м стике газа - к этому как относиться?
Стенд это то что на видео? Как вам уже говорили квадрик пытается выровнять свое положение в горизонт и увеличивает тягу на стороне которая ниже. Одновременно может пытаться остановить вращение по вертикальной оси путем замедления трех моторов которые вертятся в одну сторону и увеличивая обороты других. Тем более все моторы, винты, esc разные. Так что не может быть 100 процентов на всех моторах одновременно.
И снова - СПАСИБО. Благодарен за конструктивный диалог. Направление винтов проверил - всё ОК. Планирую проверить RPM и тягу каждого мотора в режиме THROTTLE 100% и в режиме MOTOR TEST 100%. Как сделаю - отпишусь. Кстати. В мозги APM 2.8 программа Mission Planner (крайняя версия 1.3.81) позволяет мне загрузить прошивку для гексакоптера не новее 3.2.1. Пробовал более старые версии Mission Planner и Firmware - не помогло.
Проанализировав всё вышесказанное прихожу к выводу.
- Если АПМ, регули, моторы (не балансировал) и пропеллеры (все отбалансированы) - работают корректно, то придётся признать ОЧЕНЬ большую погрешность eCalc (обещали ± 15%).
- Менять моторы, регули и пропеллеры? Или что-то ещё можно сделать с этими? На регулях написано - 4S. А вот моторы (уточнял у продавца) - только до 3S.
Посмотрел повнимательнее. Не важно какая схема. Они имеют одинаковое вращение моторов. Проверьте мотор номер 1.
Посмотрел внимательно своё видео.
Понял причину - тогда порядок моторов был другой, где-то в инструкциях была вот такая нумерация.
Хотя это, похоже, ничего не меняет.
Скоро потеплеет - вынесу всё на улицу, подвешу коптер с “пауком” за центр к потолку своей беседки и буду исследовать.😊
Хотя это, похоже, ничего не меняет.
по мне порядок моторов это самое главное 😄
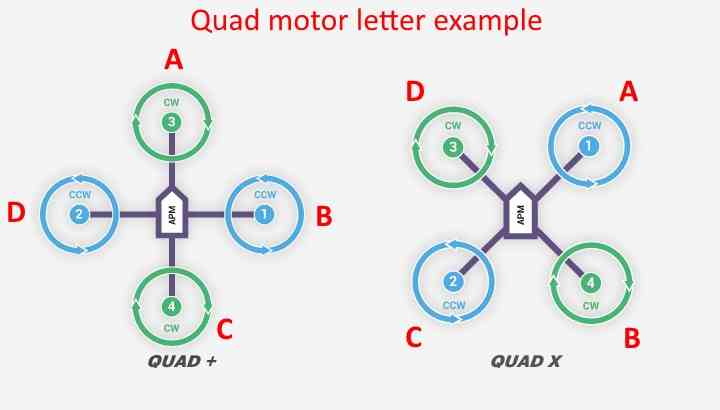
проверьте каждый мотор по отдельности нажимая Test motor A, Test motor B и так далее.
мотор А это передний правый. мотор B - следующий расположенный по часовой стрелке.
The first motor to spin will be the one located directly forward in the case of + configuration, or the first motor to the right of straight forward in the case of X configuration. The motor test will then proceed in a clockwise rotation.
проверьте каждый мотор по отдельности нажимая Test motor A, Test motor B и так далее.
мотор А это передний правый. мотор B - следующий расположенный по часовой стрелке.
Делал. Всё было ОК. Едиственная непонятка - при попытке сделать Motor Test Sequence - включается только первый мотор, сколько на кнопку не нажимал.