Проблема с калибровкой ESC c контроллером APM 2.8

Михаил, а прочитать внимательно мой первый пост и внимательно посмотреть картинки ПЕРЕД ответом - это Вы сделали? Там есть картинка - “Мотор Тест 100% 30 секунд”
В вашем первом посте вообще не понятно что за проблема и какой вопрос.
При нажатии мотор тест - все оутпуты одинаковые. Так и должно быть.
При газе 100 процентов - все оутпуты разные. Это тоже нормальное поведение квадрокоптера. Будучи привязанным он пытается выровнять свое положение. В бетафлае аналогичное поведение.
Но это если моторы в нужную сторону вращаются. Проверьте.
Мне показалось что мотор 2 вращается не правильно.

- Я думал, что Одесский маяк на моей аватарке знают все. 😊 Если был излишне самоуверен - у всех прошу прощения.
- Программы, лучше eCalc (для коптеров), я не нашёл. До этого все свои модели (более 20) просчитывал в лицензионной версии Motocalc - весьма точно получалось.
- Я нежно газую на этом “пауке”. Но замеры RPM На полном газе (рук не хватаем, чтобы и управлять, и снимать, и замерять) показали - разбег по моторам составил 3600 - 6400 об/мин Максимум был на обоих передних.
- У меня схема HEXA X , нумерация моторов у меня вот такая
- Для интересующихся - вот расчёт и для LiPo 4S, и для Li-Ion 4S4P
- У меня схема HEXA X
На ваших картинках видно что моторы 1,3 и 5 увеличивают обороты а моторы 2, 4 и 6 уменьшают. значит контролер пытается остановить вращение квадрика по вертикальной оси. Причина вращения может быть в том один из моторов вращается в неправильном направлении.
Посмотрите на правый мотор на видео. Это мотор номер 2? Он должен вращается по часовой.
- У меня схема HEXA X
Посмотрел повнимательнее. Не важно какая схема. Они имеют одинаковое вращение моторов. Проверьте мотор номер 1.
Михаил, спасибо за долготерпение! Проверю и сделаю видео.😊 Но, всё же позвольте вопрос? А то, что на стенде моторы не набирают 100% оборотов при 100%-м стике газа - к этому как относиться? Это тоже норма? Не понимаю…
А то, что на стенде моторы не набирают 100% оборотов при 100%-м стике газа - к этому как относиться?
Стенд это то что на видео? Как вам уже говорили квадрик пытается выровнять свое положение в горизонт и увеличивает тягу на стороне которая ниже. Одновременно может пытаться остановить вращение по вертикальной оси путем замедления трех моторов которые вертятся в одну сторону и увеличивая обороты других. Тем более все моторы, винты, esc разные. Так что не может быть 100 процентов на всех моторах одновременно.
И снова - СПАСИБО. Благодарен за конструктивный диалог. Направление винтов проверил - всё ОК. Планирую проверить RPM и тягу каждого мотора в режиме THROTTLE 100% и в режиме MOTOR TEST 100%. Как сделаю - отпишусь. Кстати. В мозги APM 2.8 программа Mission Planner (крайняя версия 1.3.81) позволяет мне загрузить прошивку для гексакоптера не новее 3.2.1. Пробовал более старые версии Mission Planner и Firmware - не помогло.
Проанализировав всё вышесказанное прихожу к выводу.
- Если АПМ, регули, моторы (не балансировал) и пропеллеры (все отбалансированы) - работают корректно, то придётся признать ОЧЕНЬ большую погрешность eCalc (обещали ± 15%).
- Менять моторы, регули и пропеллеры? Или что-то ещё можно сделать с этими? На регулях написано - 4S. А вот моторы (уточнял у продавца) - только до 3S.
Посмотрел повнимательнее. Не важно какая схема. Они имеют одинаковое вращение моторов. Проверьте мотор номер 1.
Посмотрел внимательно своё видео.
Понял причину - тогда порядок моторов был другой, где-то в инструкциях была вот такая нумерация.
Хотя это, похоже, ничего не меняет.
Скоро потеплеет - вынесу всё на улицу, подвешу коптер с “пауком” за центр к потолку своей беседки и буду исследовать.😊
Хотя это, похоже, ничего не меняет.
по мне порядок моторов это самое главное 😄
проверьте каждый мотор по отдельности нажимая Test motor A, Test motor B и так далее.
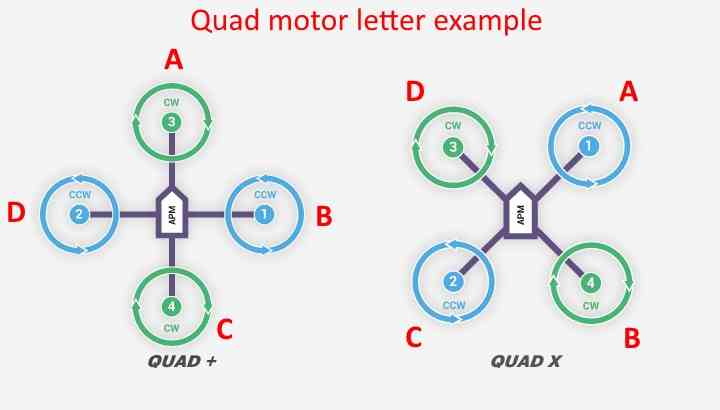
мотор А это передний правый. мотор B - следующий расположенный по часовой стрелке.
The first motor to spin will be the one located directly forward in the case of + configuration, or the first motor to the right of straight forward in the case of X configuration. The motor test will then proceed in a clockwise rotation.
проверьте каждый мотор по отдельности нажимая Test motor A, Test motor B и так далее.
мотор А это передний правый. мотор B - следующий расположенный по часовой стрелке.
Делал. Всё было ОК. Едиственная непонятка - при попытке сделать Motor Test Sequence - включается только первый мотор, сколько на кнопку не нажимал.
Провёл тест на RPM и тягу одного мотора.
- Источник управляющего сигнала - сервотестер.
- Мотор - Readytosky 930 kV
- Винт - 1045 SF
- Аккумулятор - 4400 mAh, 3S (2 штуки по 2200 в параллель)
Полученные результаты при 100% газа:
- обороты - 6270
- ток - 9,8 А (один мотор, 58,8А - вся гекса)
- тяга - 490 гр (один мотор, общая тяга при 100% газа - 2 940 г)
Всё достаточно точно соответствует расчётам в eCalc и Motocalc. Тяга немного меньше расчётной, предполагаю, что из-за просадки старых аккумуляторов (на максимальном газе - менее 11 Вольт)
Ещё раз благодарю всех участников обсуждения. Думаю - тему можно закрывать?
Сегодня провёл натурные исытания своего гексакоптера. Свёл 2 видео в один файл, со звуком не удалось справиться - просто убирайте громкость. На видео всё видно, в комментариях описал тоже всё подробно. Удачи всем! Учитесь на чужих ошибках!😊
думаю можно попробовать взлететь 😈
ну так попробовал же, не взлетело.для того, чтобы взлететь надо нормальные аккумуляторы и отвязать табуретку, если уж так сильно хочется “тренировочные шасси”, сделайте крестовину из звеньев от удочки
если уж так сильно хочется “тренировочные шасси”,
Вес “тренировочного шасси” был равен = гироподвес + камера + видео передатчик + аккумулятор 3S 1500 mAh для всего этого. Так что взлёт ВМЕСТЕ с шасси дал бы гарантию нормального полёта в полной комплектации. Даже 4S 2200 мач 30С LiFe аккумулятор - с задачей не справился. А нормальный акумулятор - увы! - мне, пенсионеру, пока не по карману. Будем ждать чистого мирного неба!
LiFe никогда не были силовыми батарейками, а кроме того у LiFe напряжение на банке значительно меньше 4,2В
и просаживаются они значительно сильнее чем LiPo и LiIon/
4S 2200 мач 30С LiFe аккумулятор - с задачей не справился.
30C 2200мач как раз и должен отдавать 60А (в идеале). Так что всё равно на пределе, даже хороший. Тот, что на вашем видео, судя по просадке, явно просится на пенсию и место им на свалке либо на вспомогательной работе - наземку запитывать и т.д. …
P.S. Может и не моё дело, но зачем собирать гексу под подвес, если для него потом нет денег на нормальный акк?
LiFe никогда не были силовыми батарейками
Ой, да вы что? Они немного тяжелее при той же ёмкости - это да, а вот и по нагрузочной способности и по долголетию вполне себе ничего… И токи держат прекрасно, и живут почти вечно.
При этом проседают под нагрузкой значительно сильнее LiPo,
при прочих равных
LiFePo под нагрузкой проседают до 3,3В, 4S при этом составит ~13В, при токе 60А мощность составит чуть больше 700Вт
для сравнения LiPo 4S просядет до 3,8В, т.е. до 15В при токе те же 60А, мощность составит 900Вт.
30C 2200мач как раз и должен отдавать 60А (в идеале).
даже Генсы ЛиПо с трудом выдают максимально заявленные (по рейтингу) токи,
про китайцев я вообще молчу )