Walkera QR X350

задавай тут
тут же тема не только по тушке валкеровской;-)
Меня интересует как привязвать в настройках переключатели к той или иной команде. Конкретно к включению камеры. Так же я пока не проверил, потому что в помещении, работу переключателя MIX, который должен по умолчанию работать на зависание и возврат. Где эти настройки в пульте я знаю, но это у меня пока вызывает затруднение. Хочется конкретно разобраться. И как настроить чтобы таймер работал, который слева вверху. Таймер камеры работает, а включаю камеру пока принудительно кнопкой на ней.
Включение камеры можно сделать через седьмой канал AUX2 на приемнике. На аппе на один из свободных тумблеров посади этот канал.
Кста, я свою ДЕВО7 осваиваю по русской инструкции ДЕВО 8s 😉
Всем доброго! Присоединяюсь к владельцам 350-й Валкеры, и сразу благодарность за всё написанное здесь. Осилил тему за 2 дня, многое прояснилось, но остались вопросы.
Сначала о комплектации: заказал на ХК, БНФ, привязал к аппе ЖР9 ДСМ2, приёмник 6110, вопросов не возникло, всё работает. Но к сожалению я понял, что приёмник придётся менять, так как у него нет настраиваемого фейлсейва и возврат при пропадании сигнала не будет работать:( ( Я в тайне надеялся, что он “нюхает” РРМ, но напрасно).
Есть вот такой вопрос: как узнать версию прошивки?
И второе, скорее проблема. несколько раз уже было. При начале моргания левого светодиода ( конец батареи) он начинает подниматься, и ручкой его опустить не удается. Сбрасываю газ почти до нуля - но он не снижается, до отключения моторов сбрасываю - он начинает падать, я чууууть добавляю газ - он опять вверх уходит. Потом просто отрубает моторы и камнем вниз. А иногда при начале моргания просто снижается и сам садится. Возвращается он на точку взлёта или нет не знаю, летаю на маленьком пятачке, где и взлёт и посадка и висение в одном месте. Было подозрение , что он “сдвигает” точку старта пока летает, но он также делал дома в комнате, когда спутников не было. Но тогда я грешил, что он сам себе нагнал давление в нижней части комнаты (дует то неслабо) и пытается “посадится” где-то выше, чем взлетал:) как вы думаете - в чём реальная причина такого поведения?
Зачем ему настраивать фейлсейв? У него предусмотрено то, что при пропадании сигнала он сам идет на точку взлета. Точкой взлета (как тут писали) котпер считает ту точку где были активированы моторы.
С автопосадкой у него есть проблеМММы. Иногда когда активирую “возврат домой” он просто летит домой, а иногда идет довольно высоко вверх (больше 20 метров) и я его вручную возвращаю вниз. Иногда после автопосадки он скачет на точке взлета и не может остановиться. Иногда после автопосадки он сам не отключает моторы.
Так, с настройками DEVO F7 практически разобрался. Только подскажите, вот к этому “седьмому каналу AUX2” это внутри квадрокоптера надо подсоединяться что бы камеру с пульта назначеной кнокой включать?
А это действительно, что надо активировать фиксированное ID для возврат? Тогда пульт сможет опять связать сигнал с квадрокоптером при его возвращении в точку взлета?
Про инструкцию pinco СПАСИБО!
Да, если открыть люк батарейного отсека, то справа у боковой стенки видны провода подключенные к приемнику. Вам нужен второй с низу ряд ножек (3 шт.). Это и есть AUX2. См. инструкцию к коптеру. Я умудрялся пинцетом вставить в них разъем даже без вскрытия корпуса коптеры;-)
Про ID не скажу. После автопосадки обычно заканчивал полет и отключал батарею.
www.youtube.com/watch?v=wKM02__DLmM&feature=youtu.…
Рабочие видео)))
Зачем ему настраивать фейлсейв?
Да потому, что без фейлсейва приёмник при пропадании сигнала газ сбрасывает в ноль, а гоу хоум не включает. Два в одном. Расстрел через повешение:)))
А наш коптер это воспринимает как призыв к суициду:)))
У меня на ДЕВО7 для SAFE во всех каналах установлено HOLD и коптер при выключении аппа летит на точку взлета.
А у меня, к сожалению, при выключении аппы газ сбрасывается в ноль, безопасность такая самолётная. А канал управления сбрасывается в мануал.
После проведенных исследований, сделано заключение: включить через тумблер пульта режим записи на камере DV04, установленной на QR X350, невозможно. ИМХО.
Исследования нужно продолжить;-)))
vic-cont.ru/…/primenenie-videokameryi-dv04-dlya-po…
Так как можно увидеть версию прошивки? И почему квадр прыгает при окончании батарейки?
Кстати по батарейке пичалька: на 1800мач летает 4.5 минуты, выжирает всего 700 мач. Надо делать мод. Но вот кстати по моду - на рцгрупсе и на видео - разные резисторы паяют, где правда?
Нет правды одной на всех.
Каждому нужно подбирать индивидуально.
Есть выход.
Как показано на рцгрусе: закоротить провода и вааще отказаться от автоотсечки, а летать по пищалке, которую настроить на минимальное напряжение на любой из банок. Пищалки громкие. На сто метров точно слышно.
А у меня, к сожалению, при выключении аппы газ сбрасывается в ноль
А какая аппаратура у Вас? У меня Спектрум 7, если биндить с вставленной в приемник перемычкой, то газ сбрасывается в ноль, даже если при бинде газ стоит на 50%. А если перемычку вытащить из приемника после того как замигал светодиод, и уже потом включить передатчик и сбиндить с приемником, то все нормально, газ не сбрасывается.
как привязвать в настройках переключатели к той или иной команде. Конкретно к включению камеры.
На аппе на один из свободных тумблеров посади этот канал.
я понял, что приёмник придётся менять, так как у него нет настраиваемого фейлсейва и возврат при пропадании сигнала не будет работать
Зачем ему настраивать фейлсейв? У него предусмотрено то, что при пропадании сигнала он сам идет на точку взлета.
Игорь, не в обиду, но зачем дезинформировать людей?
Чтобы обеспечить при использовании сторонней аппаратуры РУ автовозврат домой при пропадании сигнала, надо, чтобы приемник поддерживал функцию файлсейва, и настроить в нем канал газа на 50%, а пятый канал на 100%. Иначе, при пропадании сигнала коптер выключит двигатели и рухнет камнем.
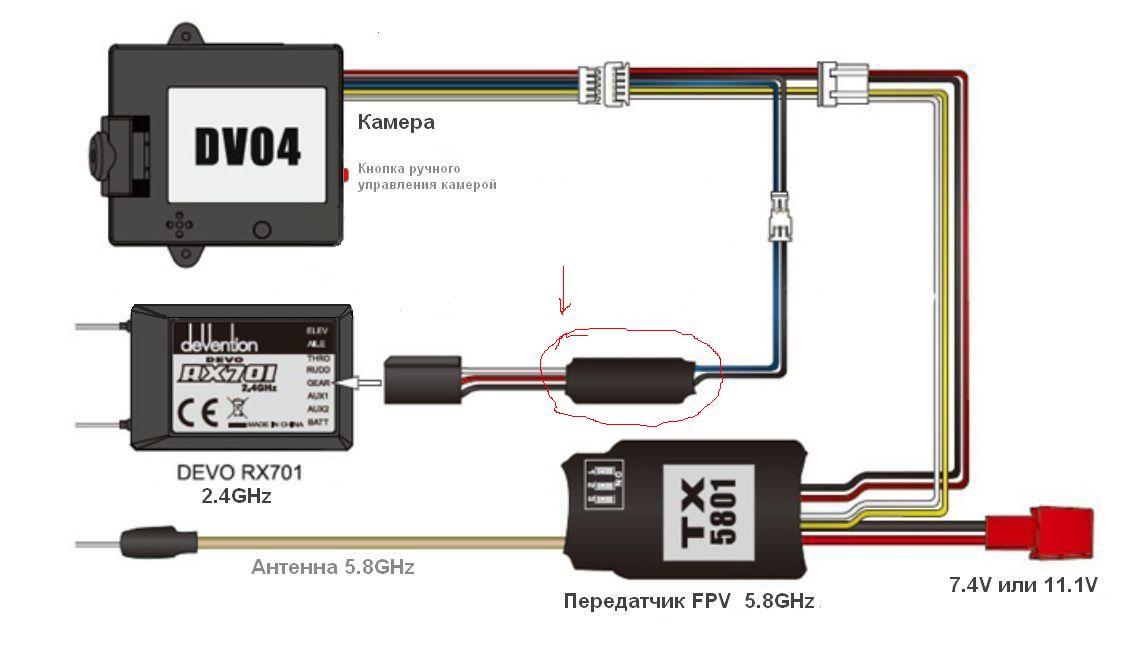
Что касательно камеры DV04, то управлять ею, просто подключив синий провод к приемнику не получиться. Приемник выдает управляющий ШИМ сигнал. А камере надо подать минус питания на синий провод для включения. То есть нужен ещё инвертированый свич, который встроен в валкеровский пучок проводов для ФПВ. Можно его купить отдельно или спаять самому, в инете куча схем.
Так как можно увидеть версию прошивки?
Увы, никак. Если в комплекте к квадру шел шнурок в шестом канале, значит версия1.0. Если не шел, то 0,9. По любому, рекомендую сразу прошиться на 1,3.
И почему квадр прыгает при окончании батарейки?
Потому, что эта функция у него коряво реализована. Рекомендую сделать мод с полным отключением автопосадки по отсечке питания, и летать по таймеру, либо контрольной пищалке вольтажа. Заодно и с временем полета все будет решено.
Игорь, не в обиду, но зачем дезинформировать людей?
Да, я недосмотрел шо там сторонняя аппа.
А про камеру я и не писал шо только синего провода хватит.
Наоборот, давал ссылку на министатейку со схемой подключения.
Рабочие видео)))
И какое оно имеет отношение к теме про Walkera QR-X350?
Да, газ настроил, но управляющий канал не настраивается. Остаётся там где и был при отключении аппы. Решил сделать газ 40%, чтобы при пропадании сигнала он просто сел на ноги, может грубо, но не кувырком
Потом просто отрубает моторы и камнем вниз. А иногда при начале моргания просто снижается и сам садится. …как вы думаете - в чём реальная причина такого поведения?
В старых прошивках очень коряво работает посадка при отсечке по питанию. В новой чуть лучше, но все-таки лучше мод.
Да, газ настроил, но управляющий канал не настраивается. Остаётся там где и был при отключении аппы.
Это приемыш 6110 виновник. У него файлсейв только по каналу газа.
Я использую с Spektrum DM9 приемыш с Хоббикинга OrangeRx R710 с сателлитом OrangeRx R100. Недорого, настраиваемый файлсейв по всем каналам, Дальность приема более 2км.