Cheerson CX-20 клон квадрокоптера DJI Phantom

Возможно слетела прошивка с регуля. Это надо ставить все моторы и пробовать калибровать все регули, хотя бы по методу “Все сразу”
Cheerson CX-20/Quanum Nova ESC Calibration
Если не помогло, то сбрасывать на дефолд настройки, по новой залить сток и заново все калибровать, в том числе регули как по ссылке выше.
Если и это не помогло тогда можно попробовать перепрошить регули rcopen.com/blogs/249571/22386
По моему мнению, сразу купить другие что из racerstar или xrotor, да и много других есть достойных. Они и шьются без проблем и настраиваются. Вот так!!!😃
Кстати, у тебя какой версии регули? 1.6 или 2.4b? А управляющий провод у тебя подключен? Правильно ли Правильно? Попробуй воткни управляющий в соседний разьем.
Всем ещё раз привет! Мне наконец-то дошел мотор, установил, попробовал откалибровать этот пищащий ESC, естественно он нифига. Ну, благо ардуина есть, перепрошил как по ссылке от Алекса, теперь он пищит по другому и только при старте.
Вопрос в следующем. Нужно ли прошивать остальные 3 ESC? UPD, запустил все крутится-вертится. 😃 Но наверное, прошивать нужно все, крутится по разному, у прошитого мотор резко стартует и резко выключается, думаю при старте может и перевернуть, если не аккуратно газануть.
Нужно ли прошивать остальные 3 ESC? UPD, запустил все крутится-вертится. 😃 Но наверное, прошивать нужно все, крутится по разному, у прошитого мотор резко стартует и резко выключается, думаю при старте может и перевернуть, если не аккуратно газануть.
конечно надо шить все
Спасибо! Я так и предполагал, по поведению мотора, но надеялся на простой исход. 😃 Лень она матушка. Буду шить. Надеюсь уже после этого наконец-то смогу подняться в небо.
Всем ещё раз привет! Мне наконец-то дошел мотор, установил, попробовал откалибровать этот пищащий ESC, естественно он нифига. Ну, благо ардуина есть, перепрошил как по ссылке от Алекса, теперь он пищит по другому и только при старте.
Вопрос в следующем. Нужно ли прошивать остальные 3 ESC? UPD, запустил все крутится-вертится. 😃 Но наверное, прошивать нужно все, крутится по разному, у прошитого мотор резко стартует и резко выключается, думаю при старте может и перевернуть, если не аккуратно газануть.
Кстати в прошивки BLHELI в конфигураторе можно отлигулировать мощность мотора при старте и много ещё чего.
Да, я уже попробовал потыркать там, спасибо! Но пока оставил как в его рекомендациях. У меня ещё вопрос, есть ли разница в последовательности подключенных ESC к АПМ? Я просто не заметил последовательность, пока ковырялся, сейчас все кое-как.
Да, я уже попробовал потыркать там, спасибо! Но пока оставил как в его рекомендациях. У меня ещё вопрос, есть ли разница в последовательности подключенных ESC к АПМ? Я просто не заметил последовательность, пока ковырялся, сейчас все кое-как.
Каждый esc подключается в определённый выход апм, смотреть распиновку мозга чирика, если идёт речь о сигнальных проводох.
Startup power отвечает за мощность при старте. Ставь 0.25 и будет плавнее запускаться.
У меня ещё вопрос, есть ли разница в последовательности подключенных ESC к АПМ?
конечно.
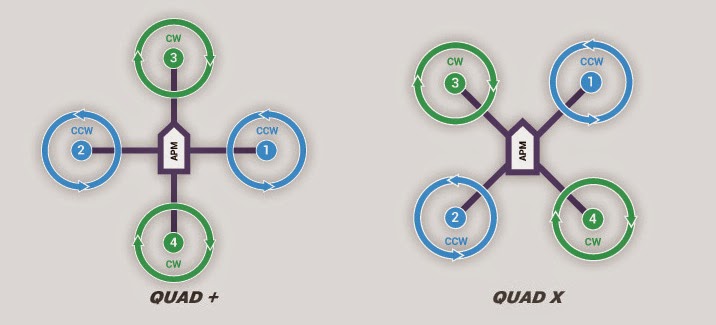
порядок моторов таков (см. QUAD X):
чего так, настало полное разочарование в pixhawk’е?
Нет, я бы сказал так - ожидал большего отличия от APM, а его по сути нет вообще! Поэтому хочу попробовать NAZA, для FPV думаю лучший вариант, если не брать в расчет современные аппараты DJI.
Поэтому хочу попробовать NAZA
типа такую www.aliexpress.com/item/…/32322622107.html
чтобы можно было перешить не в lite ?
чтобы можно было перешить не в lite ?
Ну естественно lite - сразу перешью в v2! Но только я решил взять полный комплект с GPS, а то у меня лишнего нет.
Итак попробовал размагничивание компаса разными методами, и по спирали подводить и уводить, и просто подержать на размагничивателе потом медленно по спирали убирать, и без спирали убирать. Итог опять оси Y и Z практически по нулям, ось Х -72 (±2). Какие мысли?
Итак попробовал размагничивание компаса разными методами, и по спирали подводить и уводить, и просто подержать на размагничивателе потом медленно по спирали убирать, и без спирали убирать. Итог опять оси Y и Z практически по нулям, ось Х -72 (±2). Какие мысли?
Так это очень даже неплохой результат. Калибруй и летай - проблем быть не должно.
Так это очень даже неплохой результат. Калибруй и летай - проблем быть не должно.
Ну так интересно почему ось Х то не стремится к нулю по-ближе. Какие могут быть причины.
А какой лучше компас выбрать внутренний или внешний если со стоковым летать?
Ну иначе выходило-бы, что калибровка вовсе не нужна - просто размагнитить и всё?!
Ну иначе выходило-бы, что калибровка вовсе не нужна - просто размагнитить и всё?!
Сейчас облетал, унитазинга нет в лоитере. Есть не точность удержания позиции.
Михаил, ты опытный коптеровод, у тебя уже третий контроллер!!! Подскажи, что еще можно сделать что бы улучшить удержание позиции. И еще нервно дергается в том же лоитере, это наверно пид, подскажи какой пид за это отвечает?
А какой лучше компас выбрать внутренний или внешний если со стоковым летать?
без разницы. главное правильно выставленные параметры его расположения.
Настройки компаса для АПМ.
Параметр COMPASS_EXTERNAL. Имеет значение 0 или 1. Есть еще два, но нас это не интересует в контектсе чирсона.
В случае значения “0”, независимо от того где и как физически стоит компас (на плате ли АПМ, в комбо-модуле GPS или вообще отдельно) АПМ принимает, что компас ориентирован также как ориентирована основная плата полетного контроллера АПМ, ориентация которой задается командой AHRS_ORIENTATION. И в чирсоне сх-20 она имеет значение “0” (про варианты установки можно почитать тут например).
Если же COMPASS_EXTERNAL выставить “1”, то расположения компаса будет обрабатываться полетником отдельно от расположения основной платы, и расположение компаса задается командой COMPASS_ORIENT.
В стоке на чирсоне компас хоть физически и выносной, но стоит в такой же позиции как и полетник, т.е. ориентирован на нос коптера и не перевернут ни по одной из осей. Поэтому в стоке и стоит как internal (в параметрах COMPASS_EXTERNAL = 0). При желании можно на стоковом компасе поставить его как external (COMPASS_EXTERNAL = 1), но при этом убедиться, что rotation = none (COMPASS_ORIENT = 0), будем иметь аналогичный результат.
А вот имея выносной компас на комбо-модуле ГПС+компас, в частности на многими любимом BN880 (aka Neo-M8N), и установив его как положено (т.е. антенной вверх и по направлению носа коптера), мы будем иметь компас на нижней стороне модуля, т.е. перевернутым на 180 градусов по роллу, а значит параметры нужно будет выставить: COMPASS_EXTERNAL = 1 и COMPASS_ORIENT = 8 (ну или если через визард, то компас external и orientation roll 180).
Ну так интересно почему ось Х то не стремится к нулю по-ближе. Какие могут быть причины.
как вариант: погрешности производства и не обязательно, что все оси взаимно перпендикулярны друг к другу, вот и получаются какие-то смещения, после применения которых контроллер стремится к правильному центру
Ставил назу лайт, как поставил так и снял. Из “коробки” как пишут многие, она достойно не летает, без танцев с бубном не обойтись. После танцев из приимуществ перед апм, реально держит точку как прибитая.
На этом все.
Ну так для fpv и нужно чтобы точку держало, а летает всё примерно одинаково. Настраивать нужно абсолютно всё.
Ставил на чирика?
Подскажите если кто знает, есть ли нюансы по установке такого модуля GPS, достается почти даром. 
есть ли нюансы по установке такого модуля GPS
Насколько я понимаю, в нём компас есть? Если так, то какие там нюансы-то - подключай в нужные разъемы и вперёд!