Cheerson CX-20 клон квадрокоптера DJI Phantom

Опять же обеспечить видеолинк на такую дальность это уже задача.
Любой 600mw передатчик с нормальной антенной обеспечит 2-3км легко.
Ты еще пролети эти 2-3 км и вернись обратно.
С аккумом 5200mah тоже не проблема.
Как узнаешь когда спутников достаточно для удержания?
В конфигурации установить минимальное кол-во спутников для арма в Loiter и армить в Loiter. Если заармился, значит минимум есть.
В конфигурации установить минимальное кол-во спутников для арма в Loiter и армить в Loiter. Если заармился, значит минимум есть.
На осд еще можно настроить, что б HDOP отображался.
SJ Cam только для записи или с видеовыходом на передатчик?
По видео вроде SJ4000, у него есть видео выход. Включать нужно его в менюшки.
Вижу LC видео фильтр на входе передатчика. Помогает?
конечно, иначе зачем этот лишний вес 😃 такая индуктивность весит однако
много ерунды убирает, такой же фильтр перед MinimOSD, без него изображение может мигать (цифробуквенная часть самого MinimOSD)
SJ Cam только для записи или с видеовыходом на передатчик? Не увидел проводов.
провода зелёный с чёрным на фото вид снизу
для записи и с неё также выход AV на MinimOSD и затем на TS832
С аккумом 5200mah тоже не проблема.
есть подозрение, что и меньшей ёмкости хватило бы, так как время в одну сторону чуть более 4 минут составило на 2.5 км, на обратном пути разгонял до около 80 км/ч по ветру и время ушло ещё меньше
На MinimOSD 12 вольт подается? Это то напряжение что видно на скрине? Там перемычку какую-то вроде нужно распаивать?
На MinimOSD 12 вольт подается? Это то напряжение что видно на скрине? Там перемычку какую-то вроде нужно распаивать?
apmcopter.ru/…/minimosd-proshivka-nastroyka-podkly…
вот еще deamonclub.ru/?p=1282
У меня чирик не выдает напряжение питания в телеметрию, вернее, выдает температуру на экваторе Марса. Нужна какая-то доработка или настройка?
На MinimOSD 12 вольт подается? Это то напряжение что видно на скрине? Там перемычку какую-то вроде нужно распаивать?
Minimosd питается от 5В, перемычки запаяны, встроенный преобразователь на minmosd с 12В на 5В не используется
У меня чирик не выдает напряжение питания в телеметрию, вернее, выдает температуру на экваторе Марса. Нужна какая-то доработка или настройка?
напряжение с самодельного делителя нужно заводить на одну из ног atmegи, на некоторых версиях полётного контролера нужные сигналы есть на разъёмах
Погуглив немного, понял что есть 2 версии контроллера - с распаянным делителем на 84 ноге, но неподключенным входом 12В, и с нераспаянным. Делитель спаять не проблема, сложновато для меня будет припаяться к 84 ноге. Зато можно будет реализовать Failsafe по питанию, например задействовать режим Land? Надо проверить какая у меня. В штатной реализации APM ничего не знает о напряжении питания, контролирует напряжение вторая плата, которая задействует пищалку и моргание огней на лучах.
сложновато для меня будет припаяться к 84 ноге.
чаще всего незачем, она выведена на разъём (в последних версиях так точно), смотрите пост выше фотографию с разъёмами ADC V С GND, так вот V и С это и есть обведённые две ноги
на V - подать напряжение с делителя
в новых версиях не надо паять ни на какую ногу, я на разъем ADC паял, и потом подстраивал в мп в соответствии с показаниями тестера
Ты еще пролети эти 2-3 км и вернись обратно.
улетел в выходные на 2 км. пока это мой личный рекорд. дальше наверно и буду пытаться. по времени вышло туда-обратно 8 минут, без остановок. в принципе, на своей батарее летаю 16 минут, поэтому 3 км, думаю, батарея позволит осилить, но уже на пределе
улетел в выходные на 2 км. пока это мой личный рекорд. дальше наверно и буду пытаться. по времени вышло туда-обратно 8 минут, без остановок. в принципе, на своей батарее летаю 16 минут, поэтому 3 км, думаю, батарея позволит осилить, но уже на пределе
Круто! Может быть когда нибудь и я доведу свой чирик до такого уровня
Ребят. Купил квадр, немного полетал. После краша коптер стал странно себя вести:
Взлетаю в стабилайзе, правый нижний двигатель дает максимальный газ.
Если взлетать в лоитере, то взлетает, но “туалетит”.
Грешил на регуль, но при калибровке он крутит нормально. Двиг тож проверил. Проблема в мозгах.
Но телеметрия показывает что он стоит ровно, поэтому “выпрямится” он не пытается. А что он делает?
Что может быть? Куда рыть?
Лог прилагаю, я по нему ничего не смог понять.(не взлетал, просто газовал, правый нижний вращается почти на максимум).
Какие внешние повреждения после краша?
У меня походу старая версия, вот такая:
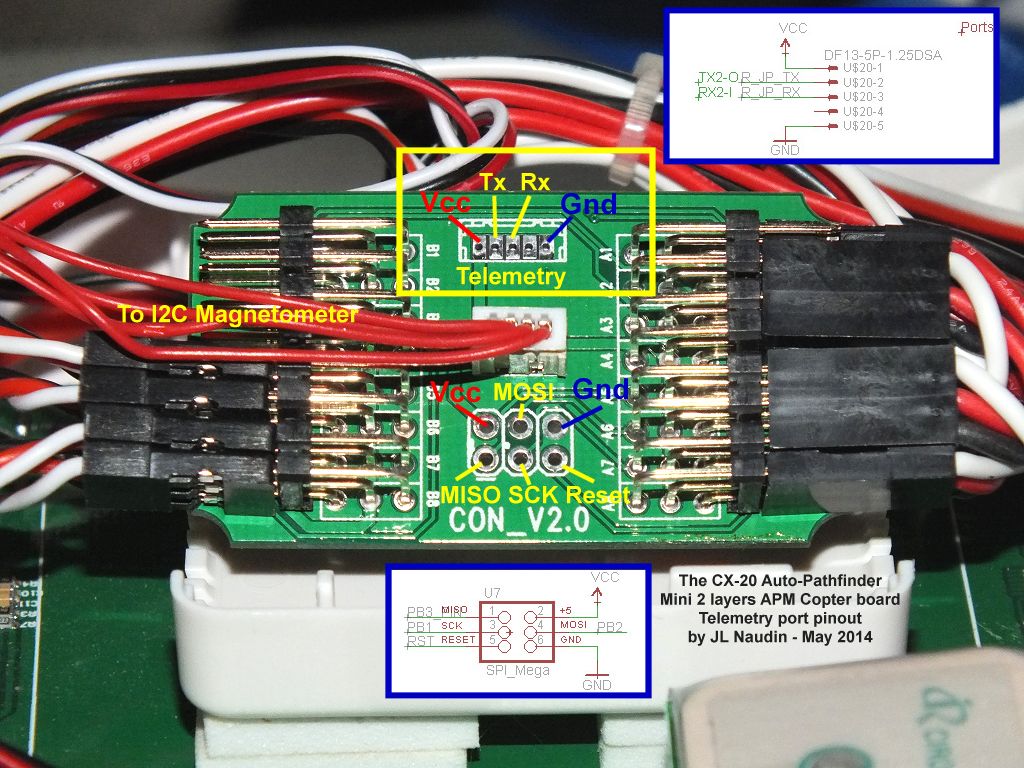
телеметрию припаивал
Какие внешние повреждения после краша?
Повреждено крепление двигателя. Но я его восстановил.
UDP заменил логи. Теперь с RCOUT.
Повреждено крепление двигателя
Какого? тот который дурит?
Сегодня был первый (в жизни)взлет. Откалибровал компас как в инструкции, заармился, и…в ручном режиме при отрыве от земли коптер переворачивается на левый бок, иногда назад. Кое как взлетел, в воздухе дико несёт в левый бок… В gps режиме немного стабильней, но всеравно носит.
В mission planner сильно завален горизонт +10 вверх и 10 вправо. Полетный контроллер стоит ровно, уровнем проверял.
Сегодня был первый (в жизни)взлет. Откалибровал компас как в инструкции, заармился, и…в ручном режиме при отрыве от земли коптер переворачивается на левый бок, иногда назад. Кое как взлетел, в воздухе дико несёт в левый бок… В gps режиме немного стабильней, но всеравно носит.
В mission planner сильно завален горизонт +10 вверх и 10 вправо. Полетный контроллер стоит ровно, уровнем проверял.
Ну дык… калибруй аксели и взлетай рывком, а не как оху@#$%^ий вертолетчик-ас и все будет ! 😃
У меня походу старая версия
тогда только к ножке, если хочется получать показания напряжения
Какого? тот который дурит?
Да. Но двиг и регуль в порядке. Проверял. Крепление восстановил, двиг сидит ровно и жестко.