Cheerson CX-20 клон квадрокоптера DJI Phantom

У меня чирик не выдает напряжение питания в телеметрию, вернее, выдает температуру на экваторе Марса. Нужна какая-то доработка или настройка?
На MinimOSD 12 вольт подается? Это то напряжение что видно на скрине? Там перемычку какую-то вроде нужно распаивать?
Minimosd питается от 5В, перемычки запаяны, встроенный преобразователь на minmosd с 12В на 5В не используется
У меня чирик не выдает напряжение питания в телеметрию, вернее, выдает температуру на экваторе Марса. Нужна какая-то доработка или настройка?
напряжение с самодельного делителя нужно заводить на одну из ног atmegи, на некоторых версиях полётного контролера нужные сигналы есть на разъёмах
Погуглив немного, понял что есть 2 версии контроллера - с распаянным делителем на 84 ноге, но неподключенным входом 12В, и с нераспаянным. Делитель спаять не проблема, сложновато для меня будет припаяться к 84 ноге. Зато можно будет реализовать Failsafe по питанию, например задействовать режим Land? Надо проверить какая у меня. В штатной реализации APM ничего не знает о напряжении питания, контролирует напряжение вторая плата, которая задействует пищалку и моргание огней на лучах.
сложновато для меня будет припаяться к 84 ноге.
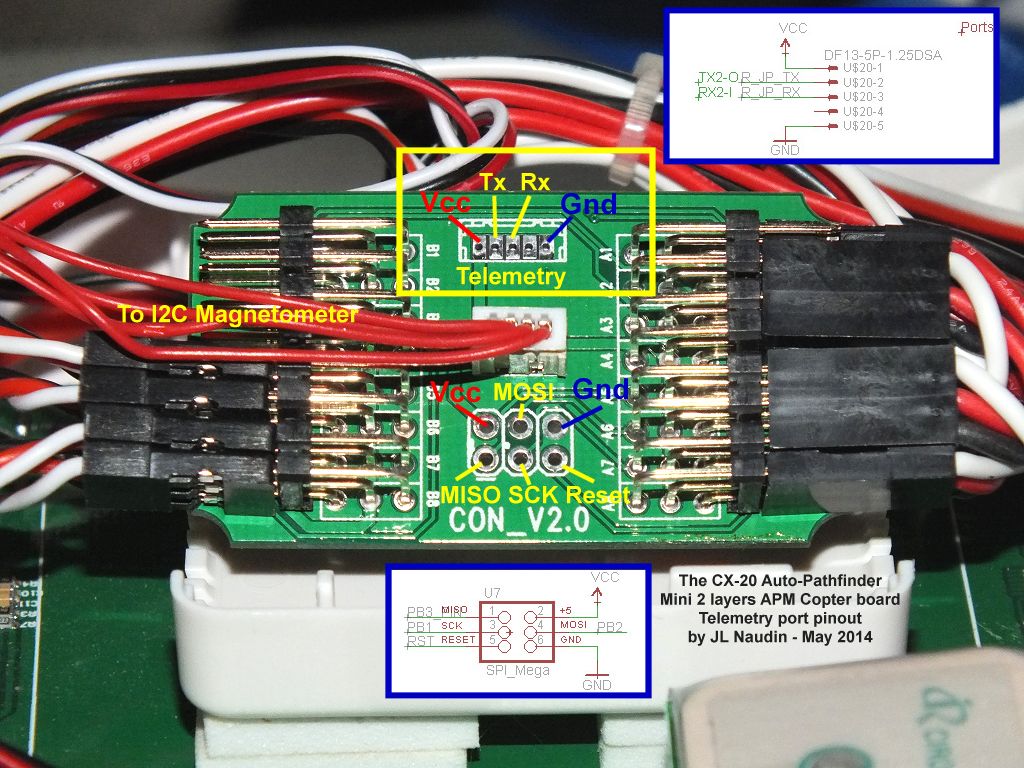
чаще всего незачем, она выведена на разъём (в последних версиях так точно), смотрите пост выше фотографию с разъёмами ADC V С GND, так вот V и С это и есть обведённые две ноги
на V - подать напряжение с делителя
в новых версиях не надо паять ни на какую ногу, я на разъем ADC паял, и потом подстраивал в мп в соответствии с показаниями тестера
Ты еще пролети эти 2-3 км и вернись обратно.
улетел в выходные на 2 км. пока это мой личный рекорд. дальше наверно и буду пытаться. по времени вышло туда-обратно 8 минут, без остановок. в принципе, на своей батарее летаю 16 минут, поэтому 3 км, думаю, батарея позволит осилить, но уже на пределе
улетел в выходные на 2 км. пока это мой личный рекорд. дальше наверно и буду пытаться. по времени вышло туда-обратно 8 минут, без остановок. в принципе, на своей батарее летаю 16 минут, поэтому 3 км, думаю, батарея позволит осилить, но уже на пределе
Круто! Может быть когда нибудь и я доведу свой чирик до такого уровня
Ребят. Купил квадр, немного полетал. После краша коптер стал странно себя вести:
Взлетаю в стабилайзе, правый нижний двигатель дает максимальный газ.
Если взлетать в лоитере, то взлетает, но “туалетит”.
Грешил на регуль, но при калибровке он крутит нормально. Двиг тож проверил. Проблема в мозгах.
Но телеметрия показывает что он стоит ровно, поэтому “выпрямится” он не пытается. А что он делает?
Что может быть? Куда рыть?
Лог прилагаю, я по нему ничего не смог понять.(не взлетал, просто газовал, правый нижний вращается почти на максимум).
Какие внешние повреждения после краша?
У меня походу старая версия, вот такая:
телеметрию припаивал
Какие внешние повреждения после краша?
Повреждено крепление двигателя. Но я его восстановил.
UDP заменил логи. Теперь с RCOUT.
Повреждено крепление двигателя
Какого? тот который дурит?
Сегодня был первый (в жизни)взлет. Откалибровал компас как в инструкции, заармился, и…в ручном режиме при отрыве от земли коптер переворачивается на левый бок, иногда назад. Кое как взлетел, в воздухе дико несёт в левый бок… В gps режиме немного стабильней, но всеравно носит.
В mission planner сильно завален горизонт +10 вверх и 10 вправо. Полетный контроллер стоит ровно, уровнем проверял.
Сегодня был первый (в жизни)взлет. Откалибровал компас как в инструкции, заармился, и…в ручном режиме при отрыве от земли коптер переворачивается на левый бок, иногда назад. Кое как взлетел, в воздухе дико несёт в левый бок… В gps режиме немного стабильней, но всеравно носит.
В mission planner сильно завален горизонт +10 вверх и 10 вправо. Полетный контроллер стоит ровно, уровнем проверял.
Ну дык… калибруй аксели и взлетай рывком, а не как оху@#$%^ий вертолетчик-ас и все будет ! 😃
У меня походу старая версия
тогда только к ножке, если хочется получать показания напряжения
Какого? тот который дурит?
Да. Но двиг и регуль в порядке. Проверял. Крепление восстановил, двиг сидит ровно и жестко.
У меня походу старая версия, вот такая
у меня такая же. пришлось и датчик напряжения к ножкам подпаивать - ювелирная работа. после пайки залил все термоклеем. уже 1,5 года летаю без проблем
ювелирная работа
Можно попробовать, но стоит ли лезть без опыта?
Валяется вот такой мозг рабочий

Может заменить на него? Будет и датчик напряжения, и тока и разъемы все стандартные, и failsafe нормальный, и обновить прошивку можно. В моей версии обновить нельзя, перестанет работать телеметрия.
Пока вижу только одну проблему - штатные светодиоды и светодиоды подсветки лучей. Первые вроде можно заменить такой стандартной сборкой

А светодиодами в лучах как управлять?
А светодиодами в лучах как управлять?
они управляются отдельным микроконтроллером, который установлен на распределительной плате питания, он также отвечает и за писк штатного зуммера
Ну тогда нормально.
Вот ссылки где MFer рассказывает как инсталировать такой полетник в чирик
rcopen.com/forum/f135/topic353590/7271
Вот про диоды rcopen.com/forum/f135/topic353590/9203
По этим ссылкам делал на своем чирике, все отлично работает, спасибо ему.