Cheerson CX-20 клон квадрокоптера DJI Phantom

улетел в выходные на 2 км. пока это мой личный рекорд. дальше наверно и буду пытаться. по времени вышло туда-обратно 8 минут, без остановок. в принципе, на своей батарее летаю 16 минут, поэтому 3 км, думаю, батарея позволит осилить, но уже на пределе
Круто! Может быть когда нибудь и я доведу свой чирик до такого уровня
Ребят. Купил квадр, немного полетал. После краша коптер стал странно себя вести:
Взлетаю в стабилайзе, правый нижний двигатель дает максимальный газ.
Если взлетать в лоитере, то взлетает, но “туалетит”.
Грешил на регуль, но при калибровке он крутит нормально. Двиг тож проверил. Проблема в мозгах.
Но телеметрия показывает что он стоит ровно, поэтому “выпрямится” он не пытается. А что он делает?
Что может быть? Куда рыть?
Лог прилагаю, я по нему ничего не смог понять.(не взлетал, просто газовал, правый нижний вращается почти на максимум).
Какие внешние повреждения после краша?
У меня походу старая версия, вот такая:
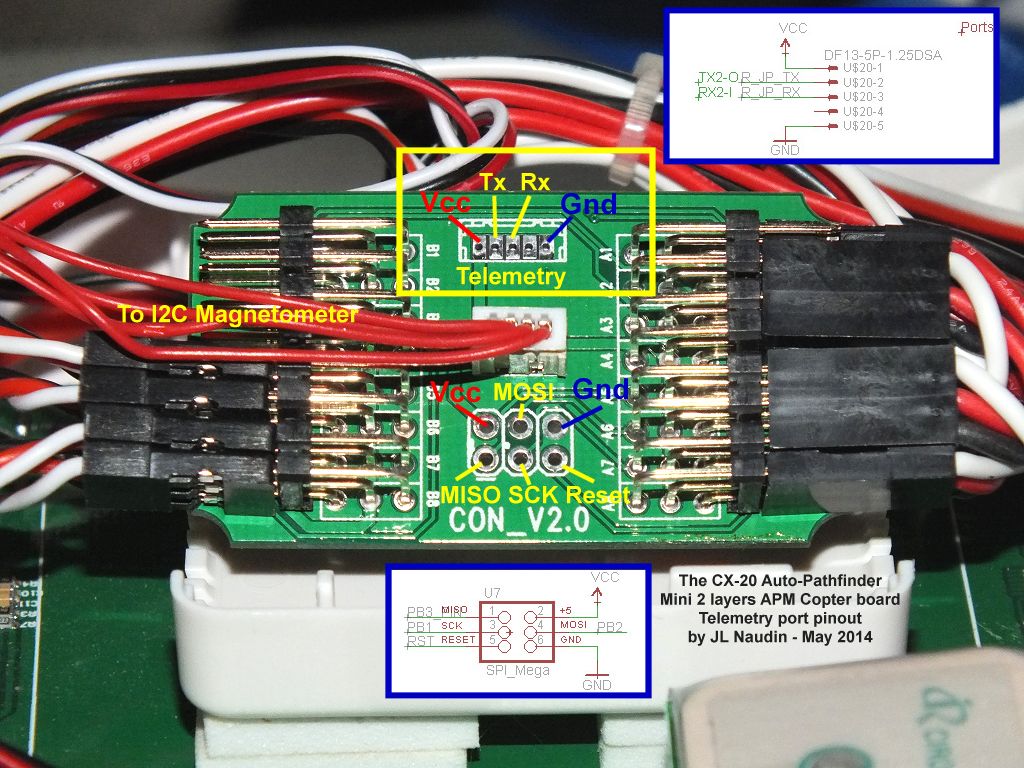
телеметрию припаивал
Какие внешние повреждения после краша?
Повреждено крепление двигателя. Но я его восстановил.
UDP заменил логи. Теперь с RCOUT.
Повреждено крепление двигателя
Какого? тот который дурит?
Сегодня был первый (в жизни)взлет. Откалибровал компас как в инструкции, заармился, и…в ручном режиме при отрыве от земли коптер переворачивается на левый бок, иногда назад. Кое как взлетел, в воздухе дико несёт в левый бок… В gps режиме немного стабильней, но всеравно носит.
В mission planner сильно завален горизонт +10 вверх и 10 вправо. Полетный контроллер стоит ровно, уровнем проверял.
Сегодня был первый (в жизни)взлет. Откалибровал компас как в инструкции, заармился, и…в ручном режиме при отрыве от земли коптер переворачивается на левый бок, иногда назад. Кое как взлетел, в воздухе дико несёт в левый бок… В gps режиме немного стабильней, но всеравно носит.
В mission planner сильно завален горизонт +10 вверх и 10 вправо. Полетный контроллер стоит ровно, уровнем проверял.
Ну дык… калибруй аксели и взлетай рывком, а не как оху@#$%^ий вертолетчик-ас и все будет ! 😃
У меня походу старая версия
тогда только к ножке, если хочется получать показания напряжения
Какого? тот который дурит?
Да. Но двиг и регуль в порядке. Проверял. Крепление восстановил, двиг сидит ровно и жестко.
У меня походу старая версия, вот такая
у меня такая же. пришлось и датчик напряжения к ножкам подпаивать - ювелирная работа. после пайки залил все термоклеем. уже 1,5 года летаю без проблем
ювелирная работа
Можно попробовать, но стоит ли лезть без опыта?
Валяется вот такой мозг рабочий

Может заменить на него? Будет и датчик напряжения, и тока и разъемы все стандартные, и failsafe нормальный, и обновить прошивку можно. В моей версии обновить нельзя, перестанет работать телеметрия.
Пока вижу только одну проблему - штатные светодиоды и светодиоды подсветки лучей. Первые вроде можно заменить такой стандартной сборкой

А светодиодами в лучах как управлять?
А светодиодами в лучах как управлять?
они управляются отдельным микроконтроллером, который установлен на распределительной плате питания, он также отвечает и за писк штатного зуммера
Ну тогда нормально.
Вот ссылки где MFer рассказывает как инсталировать такой полетник в чирик
rcopen.com/forum/f135/topic353590/7271
Вот про диоды rcopen.com/forum/f135/topic353590/9203
По этим ссылкам делал на своем чирике, все отлично работает, спасибо ему.
Можно ли на стоковой аппе сделать подпружиненный стик?
Хочу увеличить дальность на аппе, вот только условие что не чего торчать с нее не будет, бустер и питание внутри хочу разместить.
Может кто посоветует какой именно купить и как запитать?
Вот про диоды Cheerson CX-20 клон квадрокоптера DJI Phantom
Если я правильно понял, родные светодиоды можно подключать к АПМ напрямую (красный и зеленый) после небольшой манипуляции с проводами. Токоограничивающие резисторы уже распаяны на платах индикатора?
Желтый светодиод будет не задействован также как и режим auto-trim от родной прошивки?

Стоял ±5% ровно. Акселерометру кридык? Какие в среднем значения должны быть?
Приветствую всех. Можете поздравить меня сегодня с первым успешным полетом.
Что было сделано:
- Перепрошил на 3.2.1 по этой инструкции с этими настройками.
- Заменил GPS на BN 880
- Установил Power Module
- Поднял плату питания на 8 мм.
В городе на небольшом футбольном поле GPS видит 18 спутников, сколько было до замены не знаю, но сейчас вроде не плохо. GPS никак не настраивал, только калибровка коптера по туториалу.
В ручном режиме коптер безбожно сносило по ветру, когда включил Loiter режим, позицию держал +/- 1 м, но при порывах ветра 7-13 м/с коптером сильно мотыляло со стороны в сторону. (на стоковой прошивке в Лоитере коптер уводило от меня в разные стороны).
В целом пока доволен.
А почему рекомендуют взлетать/садится в ручном режиме? При таком ветре какой был сегодня, очень сложно было взлетать в ручном, взлетал в Лоитере - намного проще и безопасней же…(в ручном режиме ветер попросту переворачивал квадрокоптер возле земли)
А почему рекомендуют взлетать/садится в ручном режиме?
Потому, что если поймаете GPS глитч в неудачный момент, то его резко поведёт в сторону и уронит.
Может кто посоветует какой именно купить и как запитать?
banggood.com/FPV-2_4G-2W-2000mW-Mini-Radio-Signal-… для запитки надо перейти на аккумулятор, ибо батарейки в аппе он моментом выжрет, а может и не включится от них.
А почему рекомендуют взлетать/садится в ручном режиме?
я вообще в руку ловлю, т.к. ровно он крайне редко садится и любит кувыркаться перед землей