Walkera QR-X350 Pro

А надо ли как-то настраивать радиомодем? Или воткнул там и тут, да полетел?
Сам еще не подключил, осваиваю все поэтапно, сначала телеметрия, потом радио 😃
С настройками по умолчанию будет нормально работать. Один нюанс, мощность по умолчанию 30%. Если хотите нормальной дальности, надо мощность поднять на максимум.
Владислав, Вы платы лаком с 2-х сторон покрывали?
Здравствуйте!!! Эдуард, подскажите, сколько команд настроили на Футабе?
Всего подано 8. Приемник 8 каналов. 4- управление, 2- режимы и 2- управление подвесом (наклон по тангажу и по крену).
Если хотите нормальной дальности, надо мощность поднять на максимум.
А можно раскрыть секрет этой процедуры? Только полностью, а не по капельке 😃
На будущее буду покупать модем, поэтому заранее прошу. Думаю, многим это будет интересно.
Хотя, может быть это описано в мануале? Не держал в руках,- не знаю.
Заранее благодарю за полную информацию.
С настройками по умолчанию будет нормально работать. Один нюанс, мощность по умолчанию 30%. Если хотите нормальной дальности, надо мощность поднять на максимум.
Есть подозрение, что надо подключаться к бортовому модулю через FTDI адаптер и там будут видны настройки. Через МП (Init.Setap/Opt.Hard./3DR) подключиться к настройкам 3DR не удалось, хотя он работает, связь есть и с интерфейсом МП и с DP. Букварек тут.
На моем модуле это трудно - провода с разъема запаяны в контроллер. Другого разъема для подключения в FTDI нет пока (хотя можно попробовать через запараллеленный под OSD…).
Всего подано 8. Приемник 8 каналов. 4- управление, 2- режимы и 2- управление подвесом (наклон по тангажу и по крену).
Я и имел ввиду режимы. Приемник тоже 8 каналов, но никак не соображу, как бы режимов побольше сделать. Все упирается в 3-х позиционник и 3 режима.
Эти бы заставить нормально работать. Вон, при включении Loiter валька просто грохнулась. Хотя бы альтхолд сработал. Так нет же…
А больше режимов можно получить только микшированием. Будет 3+3. Вторым тумблером можно переключать. Но я даже не стал пока в это лезть.
С настройками по умолчанию будет нормально работать. Один нюанс, мощность по умолчанию 30%. Если хотите нормальной дальности, надо мощность поднять на максимум.
Где поднимать? В МП видел есть пункт 3DRadio.
UPD уже выше понаписывали всякого, будем изучать.
Спасибо, тогда и я не полезу пока.😃
Есть подозрение, что надо подключаться к бортовому модулю через FTDI адаптер и там будут видны настройки. Через МП (Init.Setap/Opt.Hard./3DR) подключиться к настройкам 3DR не удалось, хотя он работает, связь есть и с интерфейсом МП и с DP. Букварек тут.
На моем модуле это трудно - провода с разъема запаяны в контроллер. Другого разъема для подключения в FTDI нет пока (хотя можно попробовать через запараллеленный под OSD…).
Я все делал через МР: выбираем порт модема “initial setup->optional he->3dr”, делаем “load settings”.выбираем на обеих сторонам “tx power” максимальное, делаем “save settings”.
Все.
Через МП (Init.Setap/Opt.Hard./3DR) подключиться к настройкам 3DR не удалось, хотя он работает
Семен Семеныч! Я в него ломился через подключенный порт на МП! Не надо было волшебную кнопочку до позеленения нажимать. Просто подключить ground usb и load setting.
Но максимум мощности надо бы осторожно ставить. Тут как на Tomato WIFI можно пожечь сразу.
В продолжении моей проблемы: сегодня пробовал в третий раз “пытаться” летать с камерой и подвесом. Замечено, что с камерой все таки ловятся спутники, но как то хреново. Если мигает 3 раза, то следущее подмигивание может быть 2 раза, а то и вообще замолчать. Частота подмигивания какая то не стабильная. Вобщем больше 3 подмигиваний правого диода никак не удается выдавить. Отключаем камеру и подвес, в течение минуты ловится 5-6 миганий, минимум 4, но сек за 10 становится 5-6. И точку держит великолепно в воздухе, а с 3мя полетел с камерой, висит конечно но чудит периодически. Явно что то мешает GPS а вот что не понятно. Буду писать в китай раз тут мало кто поддержит 😦.
Ну вот, вернулся я из своего 2-х недельного отпуска… а на почте меня ждал новый контроллер! Это конечно хорошо, однако… В общем, собрал я наконец-то коптер, попробовал полетать с GPS u-blox-7M. Кошмар! Вообще, как будто нет никакого GPS. Вот тебе и двухсистемный. Уносится в сторону, притом каждый полёт в произвольную. Вернул “родной” u-blox 6M. Стало лучше, но не намного. Коптер при включении удержания исполняет “унитазинг”. То есть, начинает носиться вокруг точки удержания кругами с возрастающим креном. Упал, сломал ногу с компасом… Зла не хватает! Временно отменяю полёты (пока злиться не перестану).
Купил другую модель, подешевле ( за 19$). Вот это вещь! И летает классно и никаких заморочек.

Семен Семеныч! Я в него ломился через подключенный порт на МП! Не надо было волшебную кнопочку до позеленения нажимать. Просто подключить ground usb и load setting.
Я воткнул просто в комп в ЮСБ, винда не находит драйвер(
UPD драйвера нашел, в винде определился. Как теперь попасть в его настройки?
МП к нему не подключается.
Купил другую модель, подешевле
Ту что справа или слева? 8-DDD
попробовал полетать с GPS u-blox-7M. Кошмар! Вообще, как будто нет никакого GPS. Вот тебе и двухсистемный. Уносится в сторону, притом каждый полёт в произвольную. Вернул “родной” u-blox 6M. Стало лучше, но не намного…
Эх. Я уже мысленно щелкнул хвостом и примерял его на MiniAPM. Может в параметрах надо напилинг применить?
А мелочь пузатая хороша. И справа с характером. Вот такой паррот там тоже присмотрел.
при подключениик коптеру и ОSD и радиомодема, на видеоэкране все значения получаю ноль. Стоит только отключить радиомодем - все значения восстанавливаются.
Из-за чего может быть конфликт?
При подключении модема в планшет, в дроид планнер, он коннектится, зеленый диод горит постоянно, т.е. связь есть.
Но ничего более сделать нельзя. Никаких данных он не получает и не передает.
Нет у вас связи. Красный должен мигать, подтверждая передачу и обмен пакетами.
Так-с. В МП все-так подключился.
Нужно выбрать правильный порт, и НЕ нажимать на вилочку “connect”. А на вкладке 3DRadio нажать Load Settings. Если радиомодем на коптере включен, то в МП считаются настройки с модема-мастера, и модема-слейва. Тут же и выставляется мощность передатчика.
Нет у вас связи. Красный должен мигать, подтверждая передачу и обмен пакетами.
Когда в DP нажимаю connect, начинает с постоянной амлитудой мигать красный диод. Все данные телеметрии при этом по нулям, горизонт не работает.
Если отсоединяюсь, красный диод тухнет, а на видеоэкране No MAV DATA.
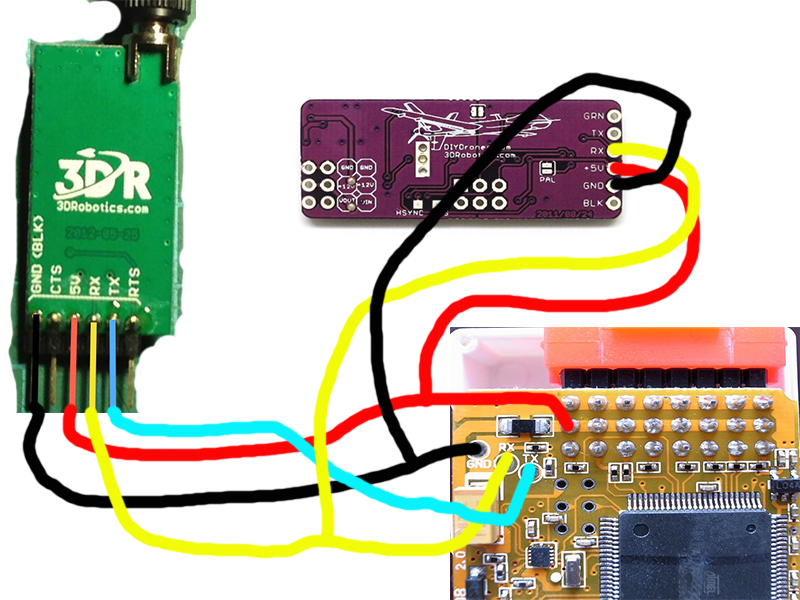
Подключал все по этой схеме.
Ну вот, вернулся я из своего 2-х недельного отпуска… а на почте меня ждал новый контроллер! Это конечно хорошо, однако… В общем, собрал я наконец-то коптер, попробовал полетать с GPS u-blox-7M. Кошмар! Вообще, как будто нет никакого GPS. Вот тебе и двухсистемный. Уносится в сторону, притом каждый полёт в произвольную. Вернул “родной” u-blox 6M. Стало лучше, но не намного. Коптер при включении удержания исполняет “унитазинг”. То есть, начинает носиться вокруг точки удержания кругами с возрастающим креном. Упал, сломал ногу с компасом… Зла не хватает! Временно отменяю полёты (пока злиться не перестану).
Купил другую модель, подешевле ( за 19$). Вот это вещь! И летает классно и никаких заморочек.
А что говорит МП?
Если отсоединяюсь, красный диод тухнет, а на видеоэкране No MAV DATA.
А не попутаны ли у вас rx tx? Посмотрите в wiki правильную рукописную схему подключения. Она отличается от стандандарта в APM.
А что говорит МП?
МП говорит, что всё в порядке. Похоже, компасс некачественный попался. Надо попробовать заменить вместе со сломанными ногами…