Walkera QR-X350 Pro

Может 3.0 В на банку? Т.к. зарядники в программе “Разряд” разряжают акк до 3.0 В на банку.
Да и в рекомендациях пишут - не разряжать менее 3.0 В на банку.
Сколько занимаюсь хобби - следую этим инструкциям и есть живые аккумуляторы с 2008 - 2009 года.
А хранить можно. Хуже хранить разряженными.
Зарядник по программе Разряд разряжает в ноль. При эксплуатации надо оставлять 10-15% емкости, чтобы акку долго жил.
При хранении полностью заряженым акку раздувается, деградирует и теряет емкость. Уж лучше разряженным. Долговременно хранить надо при напр. 3,8В на банку.
Спорить не собираюсь, в этой теме это оффтоп, есть отдельные темы по липо акку на форуме.
Без компаса при включение направление на север принимается направление носа, и дальше по акселю отслеживается поворот.
Воооот, по акселю. То есть по идее даже закручивания не должно происходить.
Честно говоря я вобще очень смутно понимаю для чего нужен компас. В стабилайз, он не нужен, в Loiter если только, и то как вспомогательное средство, ибо если есть gps координаты (x, y), то зачем ему знать где юг где север.
Компас не задействован только в режиме Акро. Даже в Стабилайз он работает, для исключения дрейфа и рыскания по руддеру. Это даже заметно, при переключении из Акро в Стабилайз коптер чуть дергает носом.
Честно говоря я вобще очень смутно понимаю для чего нужен компас. В стабилайз, он не нужен, в Loiter если только, и то как вспомогательное средство, ибо если есть gps координаты (x, y), то зачем ему знать где юг где север.
Классической системой с отрицательной обратной связью в доме является смывной бачок в туалете. Нажимается кнопочка, вода льется, поплавок отрицательно воздействует на клапан, который закрывается. В коптере все немного сложнее и проще одновременно. Контроллер при повороте вокруг оси должен контролировать угол, скорость и высоту. Соответственно, в алгоритм работы заложены отрицательные воздействия компаса, акселерометра и барометра. Кратко, на пальцах, GPS используется для получения направления и координат, которые сравниваются с показаниями компаса по той же схеме отрицательной обратной связи. Если компас не работает, то вода льется до полного краша. Вот так они вместе и работают.
Ребят а кто нибудь использовал стоковый передатчик iLook на 200мвт, метров на 300 будет связь?
Стоковый откровенное дерьмо, если метров 300 и будет, то это потолочный максимум
короче на разъеме молекс нужно искать 12 вольт ,там самый высокий ампераж
сколько банок в аклиматоре?мне зарядка показала в режиме заряда баланс 2600(подозреваю Ач) 37минут при токе 1.1А напряжение 11.9 вольт(возможности адаптера) или я заблуждаюсь?
сколько банок в аклиматоре?
3
или я заблуждаюсь?
В чем?
3
В чем?
3 умножить на 2600? емкость 5200 …
Здравствуйте!!!Может не в тему но как можно прошить DEVO-M полноценной прошивкой ардукоптер ?
3 умножить на 2600? емкость 5200 …
- Акк у вас недозаряжен!
- Его емкость 5200?
- Влилось в него 2600 всего. Не Ah, а mAh.
- Емкость не умножается на количество банок.
- Что за зарядка?
Вопрос свой написать более понятно можно?
т.е. зарядное устройство по факту показывает сколько залило, а как тестировать какое напряжение и емкость? ЗУ imax B6 mini
Здравствуйте!!!Может не в тему но как можно прошить DEVO-M полноценной прошивкой ардукоптер ?
На плате контроллера есть шесть контактных площадок- это SPI интерфейс Atmega2560. Цепляем к нему USBAVR программатор, прошиваем бутлоадер Ардупилота, затем заливаем саму прошивку.
Оригинальный бутлоадер Валкеры при этом будет затерт, и возврат к родной прошивке невозможен.
А какой смысл сего? Чем оригинальная прошивка не угодила?
а как тестировать какое напряжение и емкость? ЗУ imax B6 mini
- Зарядите акк в режиме балансировки. Напряжение должно быть 12.6 В
- Разрядите аккумулятор в режиме Разряд. Крайняя нижняя правая цифра и будет емкостью батареи.
- Читайте мануал и материалы по ЛиПо!!!
ЗЫ: это тут ОФФ. Есть темы про зарядки и аккумуляторы.
Проблема стыковки с МП обнаружилась по входящим данным. Коптер тупо не готов как устройство plug-n-play. Но после калибровки в квадрике самого порта под данные программы и совместив ее с Win ХР, МП проглотил с аппетитом , Чем Я и доволен!
Может кому еще поможет, удачи в небе!!
На плате контроллера есть шесть контактных площадок- это SPI интерфейс Atmega2560. Цепляем к нему USBAVR программатор, прошиваем бутлоадер Ардупилота, затем заливаем саму прошивку.
Оригинальный бутлоадер Валкеры при этом будет затерт, и возврат к родной прошивке невозможен.
А какой смысл сего? Чем оригинальная прошивка не угодила?
ну режим пост хольд например есть авр как турнигу шют подойдет? А распиновку можете сказать?или скриншот вапще былобы супер!!!просто дастался дево м после прям не краша а я бы сказал апокалипсиса сейчас жду к нему запчасти бародатчик как абычно в апм стаб на 3,3 в и пахоже на ppm инкодер кстате находил тему по впайке радио телеметрии и есть вопрос те ризисторы с какой целью меняются?? Простите за такой руский дизлексия мать её не как не магу перебороть хатя уже пешу и распазнаю некоторые ашибки а так как хреново до этого писал авто исправлялка тож приболела позапаминав маи ошибки и взяв их за идеал.За ранние спасибо большое за помощь.
авр как турнигу шют подойдет?
А распиновку можете сказать?
есть вопрос те ризисторы с какой целью меняются?
1- да, подойдет.
2-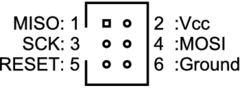
3- с целью понизить уровень логического сигнала с 5В до 3,3В.
спасибо!!! А где буладер взять?
Проблема стыковки с МП обнаружилась по входящим данным. Коптер тупо не готов как устройство plug-n-play. Но после калибровки в квадрике самого порта под данные программы и совместив ее с Win ХР, МП проглотил с аппетитом , Чем Я и доволен!
Может кому еще поможет, удачи в небе!!
Да парень… даже не знаю что сказать. Отвечу в вашем стиле: Видимо дело в том что мужик поливает себя кефиром, а велосипед за углом.