Walkera QR-X350 Pro

Ты совсем не трогал управление? Просто иногда костер резко поворачивается и интересно кто это делает?
Когда запишешь видео подготовки к такому полету, хотя бы из 3 точек?
Страшно сделать что нибудь нето и прощай валька…
Ты совсем не трогал управление? Просто иногда костер резко поворачивается и интересно кто это делает?
Я только активировал режим и больше не трогал ничего. Коптер резко поворачивает по руддеру при пролете точек, на которых он меняет курс.
Когда запишешь видео подготовки к такому полету, хотя бы из 3 точек?
Вот пытаюсь это сделать сейчас.
Страшно сделать что нибудь нето и прощай валька…
В любой момент можно перейти в Stabilize Mode и прервать миссию. Или активировать RTL и вернуться домой.
Ну ты дал Влад!! !Уважуха! Жаль, что только танков хунты не видать только(шутка!))
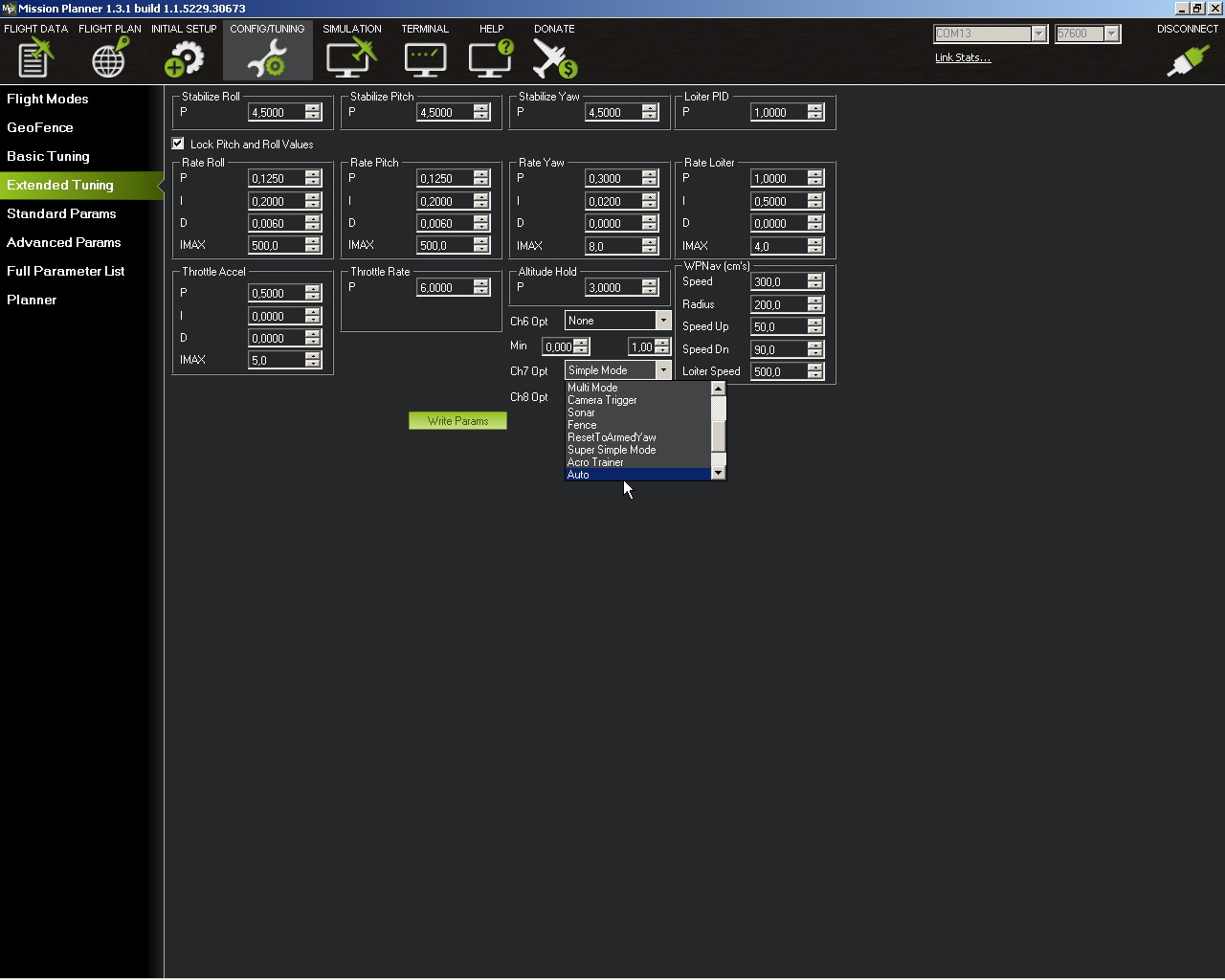
Описываю, как планировать миссию. Коннектимся шнурком к компьютеру(аппаратура включена, батарея в коптере не нужна, он будет питать мозги от ЮСБ порта), открываем МиссионПланнер, выбираем вверху справа нужный порт(где Atmega2560), выбираем скорость 57600, коннектимся, ждем соединения, вилочка на кнопке коннекта позеленеет.
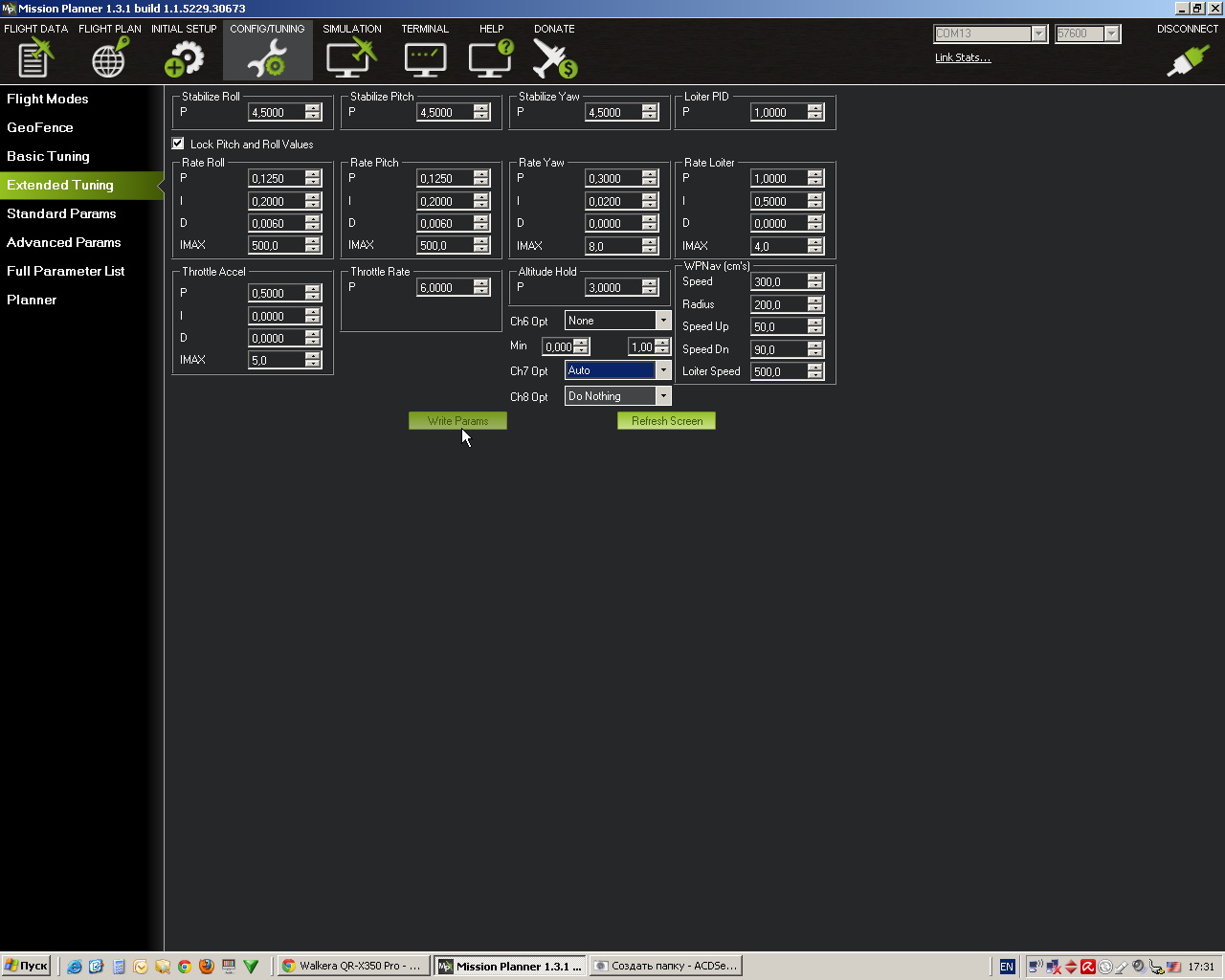
Теперь нужно нам перенастроить тумблер IOC на седьмом канале (этой функцией пожертвуем) на Avto Mode. После переназначения тумблера, нажимаем Write Params для сохранения изменений.
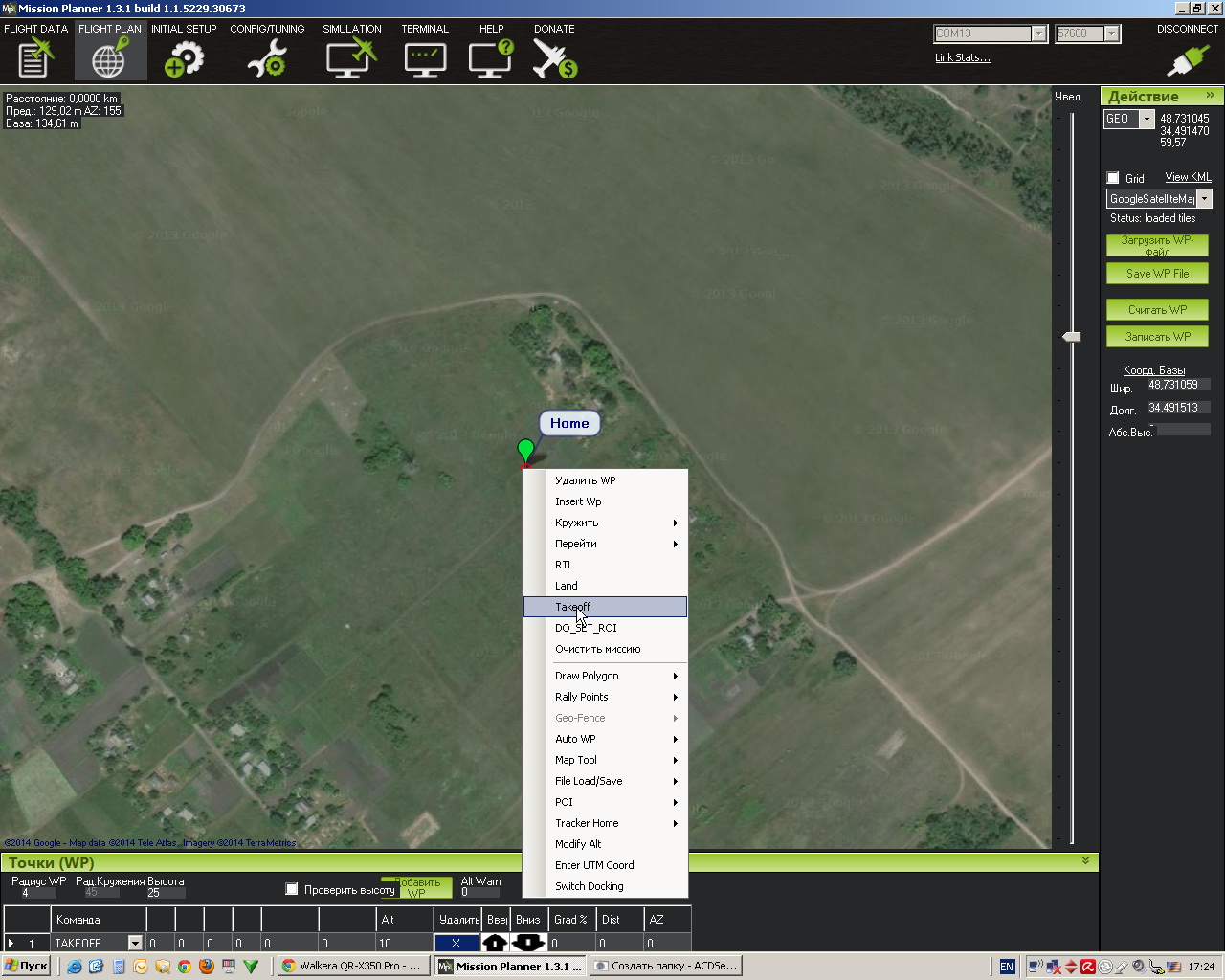
Переходим на закладку планирования миссии, выбираем точку старта, и задаем ее как стартовую Takeoff.
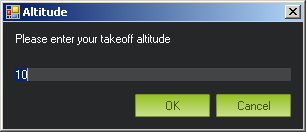
Выбираем в выпавшем окне, на какую высоту подняться после старта.
Расставляем точки маршрута, в примере я выбрал диаметр точки 4 метра и высоту точки 25 метров.

Ставим командную точку возвращения домой RTL.
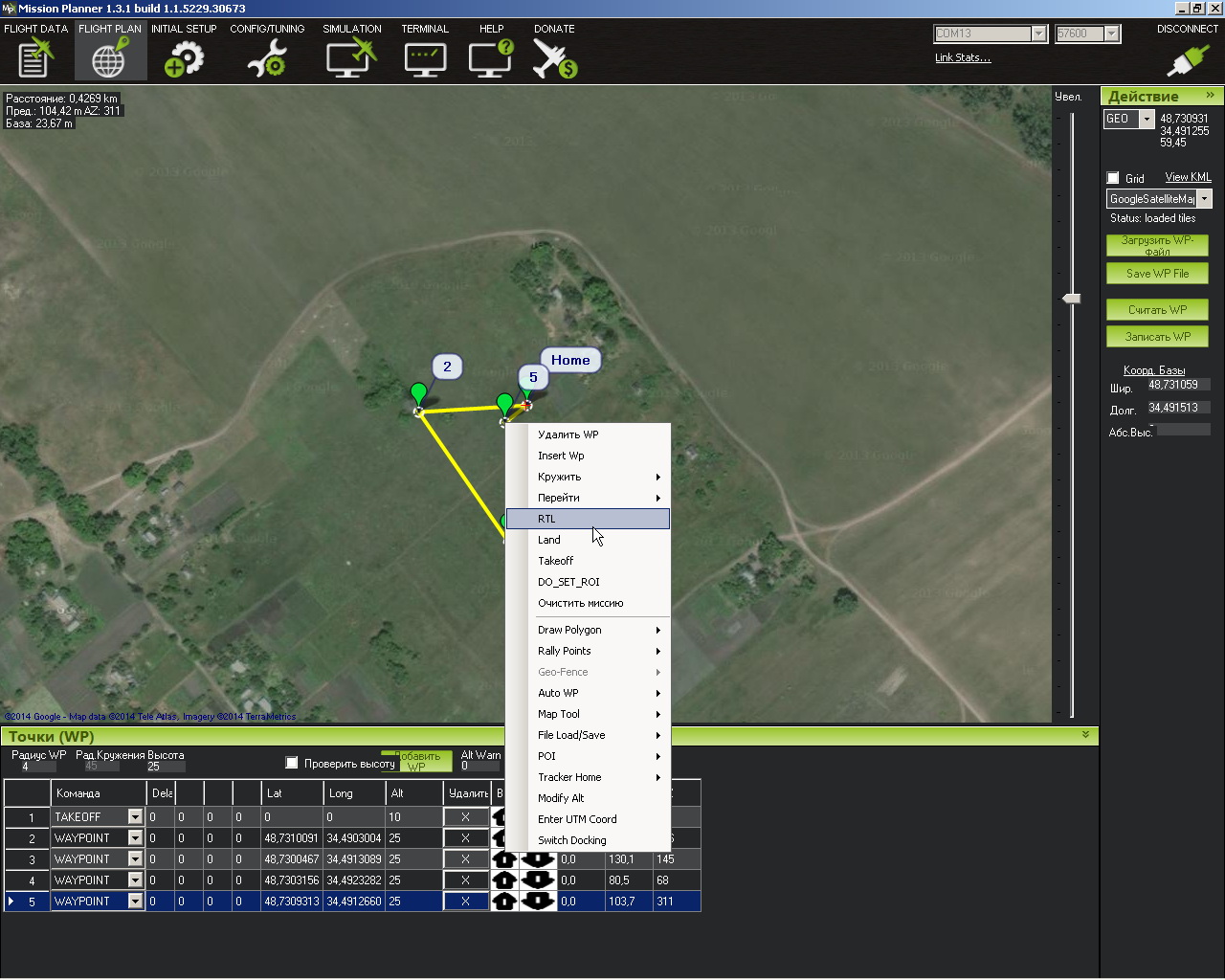
Записываем миссию в полетный контроллер, нажав кнопку “Записать WP”.
Дисконнектимся, нажав вверху справа на кнопку с вилочкой.
Отсоединяем шнурок, выключаем аппаратуру.
Теперь, как летать миссию. Приходим на точку старта, включаем аппу, подсоединяем батарейку к коптеру, и ни в коем случае не разблокируем моторы, пока не получим надежную фиксацию спутников, не менее двух миганий правого светодиода. После чего разблокируем двигатели, переключаем тумблер, тот что был раньше на IOC и поднимаем стик газа до середины. Коптер сам взлетит(его может чуть колбаснуть после отрыва, не страшно), поднимется на заданные 10 метров высоты и пойдет по маршруту. После просадки стик газа вниз и отключить тумблер автомиссии. Заблокировать двигатели. При полете по маршруту, всегда можно вернуть управление, отключив тумблер Avto .
____________________________________________________________________________________________________________________________________________________________________________________________________
Далее расскажу, как настроить различные режимы полета.
При полете по маршруту, всегда можно вернуть управление, отключив тумблер Avto .
А что будет, если связь с пультом управления пропадет?
А что будет если коптер поставить не в точку старта, которая задана в МиссионПланнер?
Если приемник и аппаратура Валкера, сработает файлсейв приемника и коптер полетит домой. Если аппа другого производителя, можно настроить программный файлсейв Ардупилота, и настроить, либо возврат домой, либо продолжение миссии. Она не имеет координат.
А что будет если коптер поставить не в точку старта, которая задана в МиссионПланнер?
Точка старта является командной, а не координатной точкой, она лишь дает команду взлететь и набрать заданную высоту.
Если аппа другого производителя, можно настроить программный файлсейв Ардупилота, и настроить, либо возврат домой, либо продолжение миссии.
Всё Валкеровское. В этом случае можно запрограмировать продолжение миссии при потере сигнала?
Если приемник и аппаратура Валкера, сработает файлсейв приемника и коптер полетит домой. Если аппа другого производителя, можно настроить программный файлсейв Ардупилота, и настроить, либо возврат домой, либо продолжение миссии.
непонятно почему в автономном полете сработает файлсейв? это плохо.
Сегодня у меня первый серьезный краш как раз из за файлсейва.
Дело было так:
Я решил снять миниролик недалеко от дома. В Тайнинке есть Церковь Благовещения Пресвятой Богородицы , вокруг обычно безлюдно, поэтому ч и полетел.
на крайних кадрах видно что когда коптер скрылся от меня (там в далеке видно меня) за стену - то управление сразу пропало, и включился ФС а картинка еще была до контакта с крышей.
Неуправляемый коптер полетел по прямой ко мне, но врезался в крышу и свалился на травку.
Из поломок: поломался USB на GoPro, и порвались резинки на подвесе.
Остальное все цело.
Я понимал что надо поднятся выше, но в режиме стабилизации он вяло реагирует на стики и пытаясь гладко снять ролик я просто не успел набрать высоту.
Сам виноват.
ФС возвращал коптер на той высоте где пропало РУ
Если использовать режим -полет по кругу, то ФС был бы такой же?
Расставляем точки маршрута, в примере я выбрал диаметр точки 4 метра и высоту точки 25 метров.
Глупый (наверно) вопрос- а почему “диаметр точки- 4м”? Насколько можно меньше?
И примечание про высоту- коптер ведь не видит препятствий, и как я понял главное предусмотреть, чтобы он был в любом случае выше всех препятствий, типа проводов и домов. не?
Всё Валкеровское. В этом случае можно запрограмировать продолжение миссии при потере сигнала?
Единственный выход это перепрошить аппу, чтобы поддерживала протокол DSM2 и поменять приемник на Оранж семи или девяттканальный, тогда можно реализовать продолжение миссии. С родным приемником и стоковой прошивкой аппы только возврат домой при пропадании сигнала во аремя миссии.
когда коптер скрылся от меня (там в далеке видно меня) за стену - то управление сразу пропало, и включился ФС а картинка еще была до контакта с крышей.
Неуправляемый коптер полетел по прямой ко мне, но врезался в крышу и свалился на травку.Если использовать режим -полет по кругу, то ФС был бы такой же?
Виктор, ты ж опытный моделист, сам виноват. Высота возврата по умолчанию 15 метров. Надо было ее в Миссионпланере увеличить на высоту церкви с запасом.
Глупый (наверно) вопрос- а почему “диаметр точки- 4м”? Насколько можно меньше?
Диаметр точки имеет значение при остановке в ней и выполнении функций. Определяет точность позиционирования в ней. При транзитном пролете диаметр не имеет значения.
И примечание про высоту- коптер ведь не видит препятствий, и как я понял главное предусмотреть, чтобы он был в любом случае выше всех препятствий, типа проводов и домов. не?
Именно так, высота возврата по умолчанию 15 метров, но ее можно настроить изменить в Миссионпланере.
когда коптер скрылся от меня (там в далеке видно меня) за стену - то управление сразу пропало
Я думаю надо обратить внимание на аппу, расстояние честно говоря небольшое, для потери сигнала, даже учитывая препятствие.
Неуправляемый коптер полетел по прямой ко мне, но врезался в крышу
В этот раз часовня устояла 😃
Привет коллеги. Вопрос такой - после включения и инициализации пульта DEVO F7 вместо того чтоб на мониторе показывались значения стиков, пульт включается в режим демонстрации видео с камеры, хотя камера вообще не подключена. Что включить чтоб на мониторе были показания пульта?
Вообще, он так и работает. Дисплей Devo F7 это видеоэкран, на который накладываются титры настроек передатчика. По дефолту на экране должно быть две строки с титрами, одна сверху (таймер, номер модели, тип модели, выходная мощность, напряжение батареи), другая снизу (уровень газа и триммеры).
Вообще, он так и работает. Дисплей Devo F7 это видеоэкран, на который накладываются титры настроек передатчика. По дефолту на экране должно быть две строки с титрами, одна сверху (таймер, номер модели, тип модели, выходная мощность, напряжение батареи), другая снизу (уровень газа и триммеры).
Это то я знаю что видеоэкран. Но куда подевались те самые две строки с титрами? Может они как то включаются/выключаются?
Сомневаюсь, что титры можно отключить. В меню то можно попасть по кнопке ENT?
В меню то можно попасть по кнопке ENT?
Да, в меню попадает. При выходе из меню экран просто горит синим безо всяких титров 😦
меню нужно выключить видео с камеры, тогда экран бдет иним с титрами
меню нужно выключить видео с камеры
А какой пункт меню? Ткни пожалуйста пальцем - а то ковырял ковырял но так и не разобрался.
Ух ты ж как много я пропустил. 😦 Внимательно теперь слежу за этой темой.