Walkera QR-X350 Pro

А кто как смазывает подшипники Валкеры?
Не могу снять защиту, чтобы масла закапать.
В тюбик из под пиницилина или похожий, наливаешь масла, желательно не минерального, туда же подшипники, и шприцом высасываешь воздух. Ваккум сделает свое дело. Хотя густая смазка все же лучше. Если иглу немного нагреть и расплющить конец, то возможно поддеть в щель между внутренним кольцом и пыльником подшипника.
[QUOTE=В МП во вкладке Radio Calebration 5 канал должен реагировать не на GEAR, а на MIX.
Для этого на пульте переназначте тублер GEAR: MENU / MODEL / OUTPUT / GEAR установить на MIX, Выйти из меню
Как точно настраивать DEVO10 не подскажу, но там все похоже[/QUOTE]
Mix заработал на 5 канале, попробовал полететь в режиме зависание держит высоту но не весит на месте летит куда хочет, попробовал выпрямить нос от себя и он вообще начал глючить, если стик сделать вперед летит влево назад вправо, а право-лево вперед-назад, чуть с ума не сошел😵 я та с нормальными стиками управлять не умею, переключил на возврат домой он пошел вверх, потом направился к дому перед посадкой нарезал круг радиусом 10 метров и пошел в место взлета кругами радиусом по 3 метра, сел. Я еще раз запустил поднялся вроде стал реагировать нормально на таганаж, но стоило мне опять его поправить по направлению стиком газа, как он опять начал глючить и все перепутал вправо-влево-назад-вперед, я его переключил на возврат домой и его понесло в сторону, упал в трех метрах от дороги:o, уже почти попрощался:-/. Помогите, что нет так, может, кто сольет настройки для новичков, чтоб я залил через MP пока не убил квадрик.
кто сольет настройки для новичков, чтоб я залил через MP пока не убил квадрик.
Что-то мне подсказывает, что беда не в настройках в MP, а в первую очередь в настройках передатчика. Чем-то похоже на Super Simple режим. В MP надо заставить контроллер адекватно реагировать на все каналы, если что-то не так работает - настроить в пульте. На вкладке Radio Calibration нужно добиться логичной работы всех стиков (включая право-лево) и переключателей на всех задействованных каналах. После этого нужно проверить, какие полетные режимы стоят на переключателе MIX (ну, или какой выберете себе для переключения каналов), проверить, что на канале 7 или 8 работает двухпозиционный переключатель и повесить на него какой-нибудь Super Simple для удобства. Вот если и после этого поведение будет непредсказуемым - надо уже лечить девайс.
Mix заработал на 5 канале, попробовал полететь в режиме зависание держит высоту но не весит на месте летит куда хочет, попробовал выпрямить нос от себя и он вообще начал глючить, если стик сделать вперед летит влево назад вправо, а право-лево вперед-назад, чуть с ума не сошел😵 я та с нормальными стиками управлять не умею, переключил на возврат домой он пошел вверх, потом направился к дому перед посадкой нарезал круг радиусом 10 метров и пошел в место взлета кругами радиусом по 3 метра, сел. Я еще раз запустил поднялся вроде стал реагировать нормально на таганаж, но стоило мне опять его поправить по направлению стиком газа, как он опять начал глючить и все перепутал вправо-влево-назад-вперед, я его переключил на возврат домой и его понесло в сторону, упал в трех метрах от дороги:o, уже почти попрощался:-/. Помогите, что нет так, может, кто сольет настройки для новичков, чтоб я залил через MP пока не убил квадрик.
Согласен с WhiteWind, похоже на SimpleMode или SuperSimpleMode. Круги- подозрительно, проверьте, правильно ли калибруете компас. Сколько было миганий правого СД перед взлетом?
В калибровке радио проверьте, чтобы 7 канал был меньше середины (если больше- то это и есть Simple или SuperSimple), тогда мучайте настройки передатчика.У меня SuperSimpleMode висит на тумблере D/R, немного удобнее FMD, т.к. находится под рукой и сразу видно в каком он положении.
P.S.: Вы сбрасывали настройки модели на пульте, в этом и ваша беда. Попросите кого-нибудь из обладателей Дево10 дать вам настройки передатчика пункта MODEL.
Что-то мне подсказывает, что беда не в настройках в MP, а в первую очередь в настройках передатчика. Чем-то похоже на Super Simple режим. В MP надо заставить контроллер адекватно реагировать на все каналы, если что-то не так работает - настроить в пульте. На вкладке Radio Calibration нужно добиться логичной работы всех стиков (включая право-лево) и переключателей на всех задействованных каналах. После этого нужно проверить, какие полетные режимы стоят на переключателе MIX (ну, или какой выберете себе для переключения каналов), проверить, что на канале 7 или 8 работает двухпозиционный переключатель и повесить на него какой-нибудь Super Simple для удобства. Вот если и после этого поведение будет непредсказуемым - надо уже лечить девайс.
На переключателе MIX в MP на вкладке INITIAL SETUP-Mandatory-FailSafe: позиция 0-Stabilize, 1-AltHold (ИЗНАЧАЛЬНО ВРОДЕ ДОЛЖЕН БЫТЬ LOITER MODE, КАК ПОМЕНЯТЬ ОН МНЕ, КАК НОВИЧКУ БОЛЬШЕ ПОДХОДИТ, 2-RTL Больше не знаю где посмотреть. Седьмой канал ни на что не реагирует. 8 канал реагирует на тумблер DR (левый с торца) что переключает не знаю, в инструкции написано, что не используется.
Согласен с WhiteWind, похоже на SimpleMode или SuperSimpleMode. Круги- подозрительно, проверьте, правильно ли калибруете компас. Сколько было миганий правого СД перед взлетом?
В калибровке радио проверьте, чтобы 7 канал был меньше середины (если больше- то это и есть Simple или SuperSimple), тогда мучайте настройки передатчика.У меня SuperSimpleMode висит на тумблере D/R, немного удобнее FMD, т.к. находится под рукой и сразу видно в каком он положении.
P.S.: Вы сбрасывали настройки модели на пульте, в этом и ваша беда. Попросите кого-нибудь из обладателей Дево10 дать вам настройки передатчика пункта MODEL.
Компас вроде нормально откалибровал, перед взлетом моргал 5-6 раз. 7 канал стоит наверное четко по середине (1508 единиц), ни на что не реагирует. На канале FMOD (который у меня ни на что не реагирует) по инструкции должен быть режим IOC, так и не понял, что он делает, или это и есть SuperSimpleMode?
Да настройки модели я сбросил в пульте и после этого у меня пошло все не так.
Уважаемые владельцы DEVO10, пожалуйста, сбросьте настройки пульта пункта MODEL или можно его как-то через USB привести в первоначальное положение?
И где в МР можно смотреть, какая команда на каком канале весит?
Спасибо за Ваше участие в решение моей проблемы.
Надыбал в интернете. Как убить новенькую валкеру за три минуты. Они ещё думают в суд подать, что валкера загорелась…
“Компас вроде нормально откалибровал, перед взлетом моргал 5-6 раз.” Если я правильно понял, то Вам немного матчасть почитать необходимо. Моргания показывают не калибровку, а количество спутников. Или просто предложение не правильно составили…
“Компас вроде нормально откалибровал, перед взлетом моргал 5-6 раз.” Если я правильно понял, то Вам немного матчасть почитать необходимо. Моргания показывают не калибровку, а количество спутников. Или просто предложение не правильно составили…
Я имел ввиду 5-6 морганий про спутники перед взлетом. Калибровал по инструкции, в МР компас
реагирует на повороты.
снят вопрос.
Всем привет. По теме не нашёл.
Вопрос такой. сегодня после краша об дерево, упал вверх лапами.
Итог сломался подвес где резинки и около моторчика ( где 2 перемычки) я так понял для усиления.
Заклел все это дело.
Но, после включения, мотор который стабилизирует камеру вверх низ, работает то хорошо, то с опозданием.
С пульта f12e не работал. Но стоит вручную камеру подвигать, все работает.
При наклоне вниз, камера не подымается (до конца) вверх… Как будто застряет.
Подскажите или ткните в ссылку, как эту беду победить
Спасибо
На переключателе MIX в MP на вкладке INITIAL SETUP-Mandatory-FailSafe: позиция 0-Stabilize, 1-AltHold (ИЗНАЧАЛЬНО ВРОДЕ ДОЛЖЕН БЫТЬ LOITER MODE, КАК ПОМЕНЯТЬ ОН МНЕ, КАК НОВИЧКУ БОЛЬШЕ ПОДХОДИТ, 2-RTL Больше не знаю где посмотреть. Седьмой канал ни на что не реагирует. 8 канал реагирует на тумблер DR (левый с торца) что переключает не знаю, в инструкции написано, что не используется.
Компас вроде нормально откалибровал, перед взлетом моргал 5-6 раз. 7 канал стоит наверное четко по середине (1508 единиц), ни на что не реагирует. На канале FMOD (который у меня ни на что не реагирует) по инструкции должен быть режим IOC, так и не понял, что он делает, или это и есть SuperSimpleMode?
Да настройки модели я сбросил в пульте и после этого у меня пошло все не так.
Уважаемые владельцы DEVO10, пожалуйста, сбросьте настройки пульта пункта MODEL или можно его как-то через USB привести в первоначальное положение?
И где в МР можно смотреть, какая команда на каком канале весит?
Спасибо за Ваше участие в решение моей проблемы.
Если 7 канал в середине, то это вроде значит что включен SimpleMode. Или попробуйте на передатчика повесить один из тумблеров на 7 канал, чтобы он реагировал и был внизу, или в МП на вкладке Config/Tuning / Copter Pids
попробуйте где Ch7 и Ch8 поставить “Do nothing” (ничего не делать).
Но, после включения, мотор который стабилизирует камеру вверх низ, работает то хорошо, то с опозданием. С пульта f12e не работал. Но стоит вручную камеру подвигать, все работает.
После такого падения могут быть и более печальные последствия для подвеса и его моторов. Если все работает более-менее нормально, но есть отдельные “срывы” или просто начинает дергаться, хотя никуда не опирается, то возможно, что беда, как у меня была: оторвались провода в месте крепления к обмотке мотора. Там пайка слабая, на соплях, мне пришлось все перепаивать на обоих моторах. Только после этого все стало работать более-менее, но отдельные глюки все равно происходят, причину я найти пока не смог.
Рекомендую сделать полную калибровку, как описано в вики multicopterwiki.ru/index.php/Walkera_G-2D#.D0.9D.D…, а ежели не поможет, то нужно уже смотреть, какие повреждения механика получила (а может и электроника).
Народ, а кто-нибудь пробовал такие очки Walkera Goggle 2?
Чета в инете очень мало отзывов.
Повтор вопроса.
Народ,такая ситуация: установил ОСД, радиомодем, передатчик видео, (сопротивления на контроллере паял не сам, отдавал в мастерскую, когда заметил что оплавили немного корпус бародатчика), телеметрия заработала вроде все норм., пошел в поле на испытания и сразу неадекватное поведение в в режиме “лойтер” в итоге краш с разбитым корпусом. Замена корпуса, контроллера, собрал, подключаю и вот что происходит дальше:
- При включении коптера левый диод мигает (сек. 5-8) в привычном режиме пока биндится пульт, после чего он загорается на 1-2 сек. и опять начинает мигать, только уже примерно сек.30 в том же темпе. После миганий пульт работает норм.
- При разблокировки движков правый диод начинает быстро мигать в течении сек. 5-8, после все работает.
- Один двигатель запускается с запозданием или может совсем не запустится. (регули уже заказал 2шт, на 2-х лучах диоды светятся по разному, поэтому 2 шт.) с ними все понятно.
Может кто посоветовать куда копать и почему сейчас диод выдает такие мигания? из-за регулей? или еще в чем то дело?
Пока выбирал вальку, попалась приемлемая цена на второй фантик вижн+. Взял.
За подсказки спасибо, узнал много нового, что то даже понимать начал, но походу в другую ветку переезжаю.
попалась приемлемая цена на второй фантик вижн+. Взял.
и правильно сделал. у меня фантик и валька на фантике летаю, а с валькой рукоблудием, а если летит, то хуже фантика
но походу в другую ветку переезжаю
а там скучно… вот то ли у нас: то упадет, то сломается, то улетит в китай, а то руля не слушается )))) Крастота!
Замучал меня корпус Вальки- слишком мало места под “обвес”, хилый пластик, ужасный металл на винтах (хватает на 5-6 закручиваний).
Получил раму S500, буду переезжать на нее. Пока незнаю, тащить мозги с прошки или поставить APM. Теперь жду начинку.
поставить APM
!!!
Смысл оставаться на тех же мозгах, которые многие ругают и прошивают с удивительными результатами в тот же APM? Я бы просто собирал другой квадр на вашем месте. ИМХО.
!!!
Смысл оставаться на тех же мозгах, которые многие ругают и прошивают с удивительными результатами в тот же APM? Я бы просто собирал другой квадр на вашем месте. ИМХО.
А что в DEVO-M плохого? Разьве что портов телеметрии нет и OSD сложнее подключить, отсутствуют логи. В остальном тот же APM. Летаю на стоковой прошивке, еще ни разу не подводил.
Другое дело Валикировские моторы, регуляторы и пластик, которые очень неочень такие.
А что в DEVO-M плохого?
Да плохого ничего, наверное, я тоже летаю и проблем не знаю, но кто-то, вон, жалуется, что до перепрошивки в APM в лойтере “девочка нервничает”, а после - как гвоздем прибитая висит. Учитывая, что уже два раза слышал такую историю, подумал, что есть тут какая-то закономерность. Ну и все эти танцы-шманцы, что у кого-то на прошивке 1.7 глюки и закидоны, а кто-то проблем не знает.
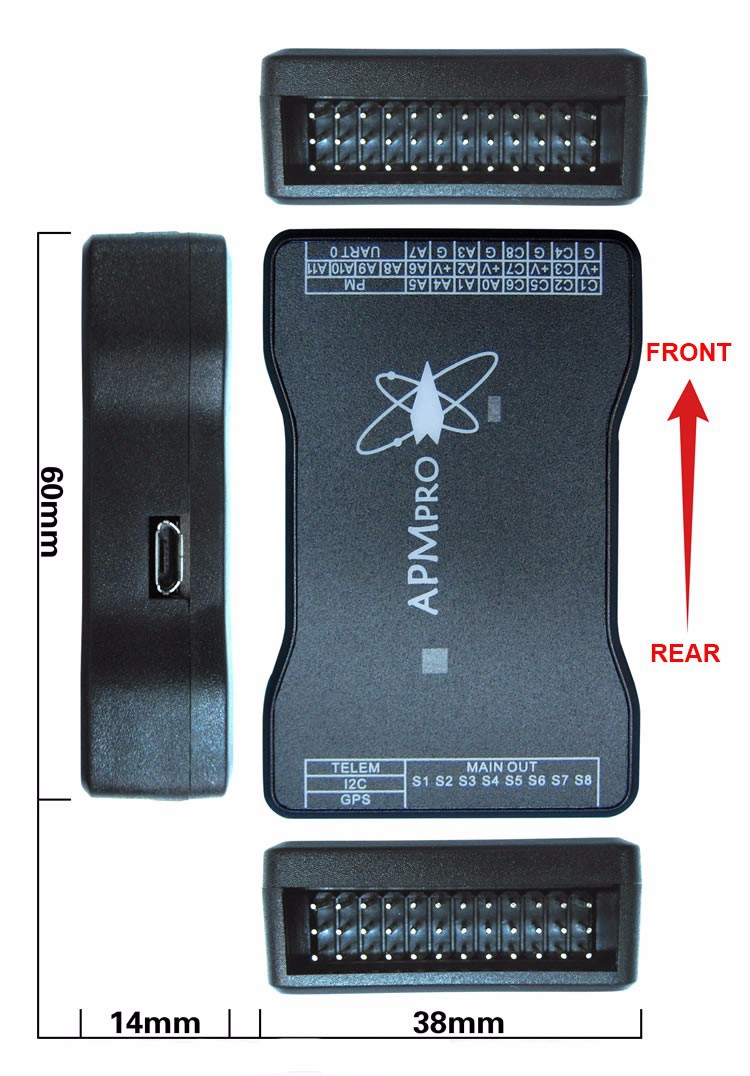
Парни, кто знает что нибудь про этот контроллер? ru.aliexpress.com/item/…/32317830333.html (не реклама)
Да плохого ничего, наверное, я тоже летаю и проблем не знаю, но кто-то, вон, жалуется, что до перепрошивки в APM в лойтере “девочка нервничает”, а после - как гвоздем прибитая висит. Учитывая, что уже два раза слышал такую историю, подумал, что есть тут какая-то закономерность. Ну и все эти танцы-шманцы, что у кого-то на прошивке 1.7 глюки и закидоны, а кто-то проблем не знает.
Значит пока нет смысла менять нормально работающий контроллер. В лоитере висит как прибитый с точностью пол метра, висит спокойно, не раскачиваясь. Даже не смотрел, какая прошивка стоит с завода.
кто знает что нибудь про этот контроллер
По описанию MiniAPM. Очень удобная компоновка применительно к W350P — можно будет обойтись без мучительной распайки. Есть стандартные выводы телеметрии на модем и OSD без всякой перепайки резисторов. Почти вдвое дешевле стандартного контроллера devo-m. Попробуйте. Нам расскажете о результатах 😉. Как раз этот вариант, наверное, сгодится как замена стандартного контроллера. Он же без модуля GPS.