Walkera QR-X350 Pro

снят вопрос.
Всем привет. По теме не нашёл.
Вопрос такой. сегодня после краша об дерево, упал вверх лапами.
Итог сломался подвес где резинки и около моторчика ( где 2 перемычки) я так понял для усиления.
Заклел все это дело.
Но, после включения, мотор который стабилизирует камеру вверх низ, работает то хорошо, то с опозданием.
С пульта f12e не работал. Но стоит вручную камеру подвигать, все работает.
При наклоне вниз, камера не подымается (до конца) вверх… Как будто застряет.
Подскажите или ткните в ссылку, как эту беду победить
Спасибо
На переключателе MIX в MP на вкладке INITIAL SETUP-Mandatory-FailSafe: позиция 0-Stabilize, 1-AltHold (ИЗНАЧАЛЬНО ВРОДЕ ДОЛЖЕН БЫТЬ LOITER MODE, КАК ПОМЕНЯТЬ ОН МНЕ, КАК НОВИЧКУ БОЛЬШЕ ПОДХОДИТ, 2-RTL Больше не знаю где посмотреть. Седьмой канал ни на что не реагирует. 8 канал реагирует на тумблер DR (левый с торца) что переключает не знаю, в инструкции написано, что не используется.
Компас вроде нормально откалибровал, перед взлетом моргал 5-6 раз. 7 канал стоит наверное четко по середине (1508 единиц), ни на что не реагирует. На канале FMOD (который у меня ни на что не реагирует) по инструкции должен быть режим IOC, так и не понял, что он делает, или это и есть SuperSimpleMode?
Да настройки модели я сбросил в пульте и после этого у меня пошло все не так.
Уважаемые владельцы DEVO10, пожалуйста, сбросьте настройки пульта пункта MODEL или можно его как-то через USB привести в первоначальное положение?
И где в МР можно смотреть, какая команда на каком канале весит?
Спасибо за Ваше участие в решение моей проблемы.
Если 7 канал в середине, то это вроде значит что включен SimpleMode. Или попробуйте на передатчика повесить один из тумблеров на 7 канал, чтобы он реагировал и был внизу, или в МП на вкладке Config/Tuning / Copter Pids
попробуйте где Ch7 и Ch8 поставить “Do nothing” (ничего не делать).
Но, после включения, мотор который стабилизирует камеру вверх низ, работает то хорошо, то с опозданием. С пульта f12e не работал. Но стоит вручную камеру подвигать, все работает.
После такого падения могут быть и более печальные последствия для подвеса и его моторов. Если все работает более-менее нормально, но есть отдельные “срывы” или просто начинает дергаться, хотя никуда не опирается, то возможно, что беда, как у меня была: оторвались провода в месте крепления к обмотке мотора. Там пайка слабая, на соплях, мне пришлось все перепаивать на обоих моторах. Только после этого все стало работать более-менее, но отдельные глюки все равно происходят, причину я найти пока не смог.
Рекомендую сделать полную калибровку, как описано в вики multicopterwiki.ru/index.php/Walkera_G-2D#.D0.9D.D…, а ежели не поможет, то нужно уже смотреть, какие повреждения механика получила (а может и электроника).
Народ, а кто-нибудь пробовал такие очки Walkera Goggle 2?
Чета в инете очень мало отзывов.
Повтор вопроса.
Народ,такая ситуация: установил ОСД, радиомодем, передатчик видео, (сопротивления на контроллере паял не сам, отдавал в мастерскую, когда заметил что оплавили немного корпус бародатчика), телеметрия заработала вроде все норм., пошел в поле на испытания и сразу неадекватное поведение в в режиме “лойтер” в итоге краш с разбитым корпусом. Замена корпуса, контроллера, собрал, подключаю и вот что происходит дальше:
- При включении коптера левый диод мигает (сек. 5-8) в привычном режиме пока биндится пульт, после чего он загорается на 1-2 сек. и опять начинает мигать, только уже примерно сек.30 в том же темпе. После миганий пульт работает норм.
- При разблокировки движков правый диод начинает быстро мигать в течении сек. 5-8, после все работает.
- Один двигатель запускается с запозданием или может совсем не запустится. (регули уже заказал 2шт, на 2-х лучах диоды светятся по разному, поэтому 2 шт.) с ними все понятно.
Может кто посоветовать куда копать и почему сейчас диод выдает такие мигания? из-за регулей? или еще в чем то дело?
Пока выбирал вальку, попалась приемлемая цена на второй фантик вижн+. Взял.
За подсказки спасибо, узнал много нового, что то даже понимать начал, но походу в другую ветку переезжаю.
попалась приемлемая цена на второй фантик вижн+. Взял.
и правильно сделал. у меня фантик и валька на фантике летаю, а с валькой рукоблудием, а если летит, то хуже фантика
но походу в другую ветку переезжаю
а там скучно… вот то ли у нас: то упадет, то сломается, то улетит в китай, а то руля не слушается )))) Крастота!
Замучал меня корпус Вальки- слишком мало места под “обвес”, хилый пластик, ужасный металл на винтах (хватает на 5-6 закручиваний).
Получил раму S500, буду переезжать на нее. Пока незнаю, тащить мозги с прошки или поставить APM. Теперь жду начинку.
поставить APM
!!!
Смысл оставаться на тех же мозгах, которые многие ругают и прошивают с удивительными результатами в тот же APM? Я бы просто собирал другой квадр на вашем месте. ИМХО.
!!!
Смысл оставаться на тех же мозгах, которые многие ругают и прошивают с удивительными результатами в тот же APM? Я бы просто собирал другой квадр на вашем месте. ИМХО.
А что в DEVO-M плохого? Разьве что портов телеметрии нет и OSD сложнее подключить, отсутствуют логи. В остальном тот же APM. Летаю на стоковой прошивке, еще ни разу не подводил.
Другое дело Валикировские моторы, регуляторы и пластик, которые очень неочень такие.
А что в DEVO-M плохого?
Да плохого ничего, наверное, я тоже летаю и проблем не знаю, но кто-то, вон, жалуется, что до перепрошивки в APM в лойтере “девочка нервничает”, а после - как гвоздем прибитая висит. Учитывая, что уже два раза слышал такую историю, подумал, что есть тут какая-то закономерность. Ну и все эти танцы-шманцы, что у кого-то на прошивке 1.7 глюки и закидоны, а кто-то проблем не знает.
Парни, кто знает что нибудь про этот контроллер? ru.aliexpress.com/item/…/32317830333.html (не реклама)
Да плохого ничего, наверное, я тоже летаю и проблем не знаю, но кто-то, вон, жалуется, что до перепрошивки в APM в лойтере “девочка нервничает”, а после - как гвоздем прибитая висит. Учитывая, что уже два раза слышал такую историю, подумал, что есть тут какая-то закономерность. Ну и все эти танцы-шманцы, что у кого-то на прошивке 1.7 глюки и закидоны, а кто-то проблем не знает.
Значит пока нет смысла менять нормально работающий контроллер. В лоитере висит как прибитый с точностью пол метра, висит спокойно, не раскачиваясь. Даже не смотрел, какая прошивка стоит с завода.
кто знает что нибудь про этот контроллер
По описанию MiniAPM. Очень удобная компоновка применительно к W350P — можно будет обойтись без мучительной распайки. Есть стандартные выводы телеметрии на модем и OSD без всякой перепайки резисторов. Почти вдвое дешевле стандартного контроллера devo-m. Попробуйте. Нам расскажете о результатах 😉. Как раз этот вариант, наверное, сгодится как замена стандартного контроллера. Он же без модуля GPS.
А я вот такой контроллер получил. Поновее АПМ. Сначала тоже хотел АПМ на отдельную раму поставить, почитал и решил новее поставить. Рама 450. Сначала хочу просто облетать, а если понравится может и на 350 поставлю. Нравится, что GPS выносная антенна + встроенный компас и, судя по описанию, прост в настройке.
Господа, просил поделиться настройками на DEVO 10, но, что-то все молчат. Пожалуйста, сбросьте настройки пульта пункта MODEL (что на каком канале прописано) или может, можно его как-то через USB привести в первоначальное положение? Поделитесь и Вам прибудет 3 минуты дополнительных полетов на аккумулятор;).
Если 7 канал в середине, то это вроде значит что включен SimpleMode. Или попробуйте на передатчика повесить один из тумблеров на 7 канал, чтобы он реагировал и был внизу, или в МП на вкладке Config/Tuning / Copter Pids
попробуйте где Ch7 и Ch8 поставить “Do nothing” (ничего не делать).
Яков я не смог пройти по указанному пути, но нашел CH7 CH8, в Full Parametr List, там на седьмом канале прописана 3, что значит SIMPLE MODE, там мне необходимо поставить 0 я правильно понял? Но у меня все равно никакой стик ничего не переключает на 7 канале, тогда как может активироваться SIMPLE MODE если я не могу включить 7 канал?
А вот то, что прописано на переключателе MIX я могу видеть и менять в пунктах FTLMODE1-6? и например если я поменяю на вкладке FTLMODE6 шестерку на 10, то у меня будет на 2 позиции команда Loiter? только вот я не пойму почему там написано OF_Loiter?
Если вам это поможет, то есть настройки Devo 10 перешитую в Deviation. Подробнее не подскажу, поскольку ее давно продал.
что-то все молчат
Гайдар, не обижайтесь, десятки, видимо, под рукой нет ни у кого. Давайте попробуем первый курс терапии, у меня даже не Devo уже, но я попробую подсказать алгоритм.
- У меня на Devo F7 каналы 1-4 вообще поменять нельзя было (думаю, на 10ке тоже), так что тут вы не напортачите. А вот на остальные 4 канала (приемник восьмиканальный в вальке) можно навешать нужный стик или крутилку. На F7 это раздел Device output, попробуйте пощелкать эти настройки (или что-то похожее), чтобы выставить нужные стики на каналы 5-8. Проверяйте сразу в MP на подключенной валькере.
- Убедитесь, что на каналах 1-4 (ваши стики) работают Pitch/Roll и Throttle/Yaw. Это будет видно на экране калибровки. Все палочки должны двигаться в нужных направлениях, то есть - предсказуемо.
- Убедитесь, что на канале 5 работает переключатель полетных режимов и там же на вкладке калибровки меняются показания (какой вы для него выберете - уже ваше дело).
- Убедитесь, что на каналах 6-8 работают остальные переключатели (если собираетесь ими пользоваться, мне кажется на 10ке грех упускать возможность).
- Сделайте калибровку ВСЕХ переключателей и стиков.
- Выставьте настройки в MP для каналов 6-8 по своему усмотрению. Но, для начала, я бы выключил все режимы (так проще понять, в чем причина сбоев).
Отпишите о результатах, если не поможет, будем дальше думать.
Попробуйте. Нам расскажете о результатах . Как раз этот вариант, наверное, сгодится как замена стандартного контроллера. Он же без модуля GPS.
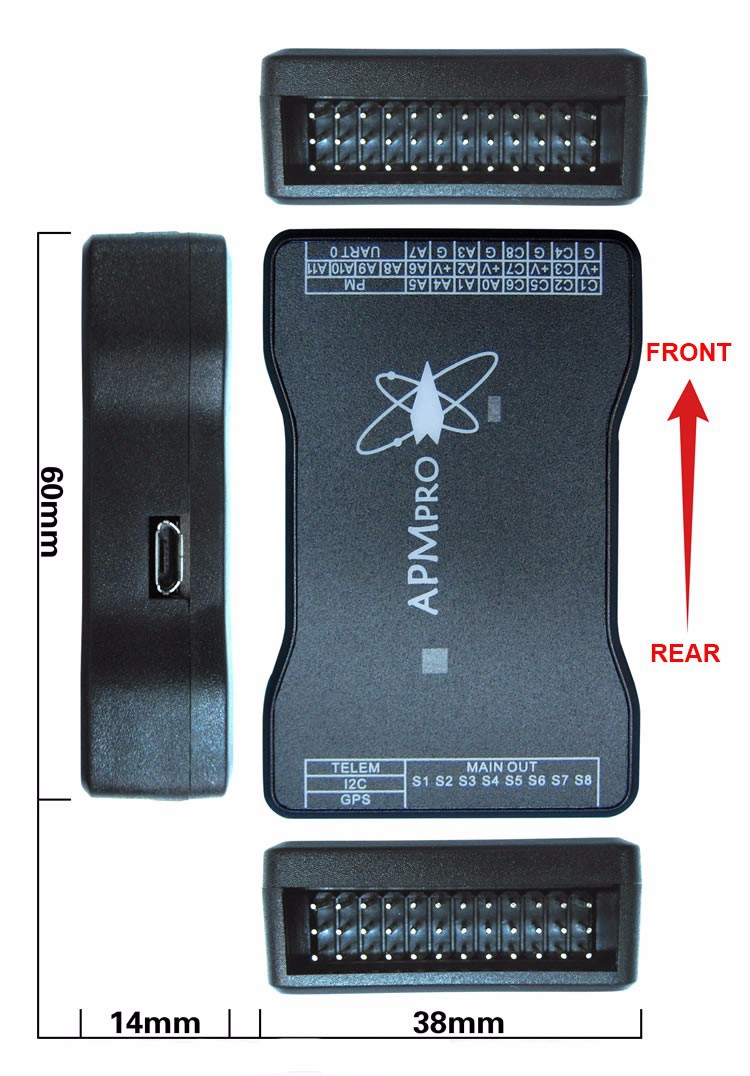
Уважаемый Евгений, не могли бы вы подсказать мне по назначению портов на этом контроллере APM PRO. Мне на днях должен прийти, но я пока не во всем разобрался. Например что за выход “12С” - это компас? Или “UART 0” для чего этот порт? Еще А8, А9, А10, А11 мне тоже не понятно. Остальное вроде понятно. Спаибо!