Walkera QR-X350 Pro

Пока выбирал вальку, попалась приемлемая цена на второй фантик вижн+. Взял.
За подсказки спасибо, узнал много нового, что то даже понимать начал, но походу в другую ветку переезжаю.
попалась приемлемая цена на второй фантик вижн+. Взял.
и правильно сделал. у меня фантик и валька на фантике летаю, а с валькой рукоблудием, а если летит, то хуже фантика
но походу в другую ветку переезжаю
а там скучно… вот то ли у нас: то упадет, то сломается, то улетит в китай, а то руля не слушается )))) Крастота!
Замучал меня корпус Вальки- слишком мало места под “обвес”, хилый пластик, ужасный металл на винтах (хватает на 5-6 закручиваний).
Получил раму S500, буду переезжать на нее. Пока незнаю, тащить мозги с прошки или поставить APM. Теперь жду начинку.
поставить APM
!!!
Смысл оставаться на тех же мозгах, которые многие ругают и прошивают с удивительными результатами в тот же APM? Я бы просто собирал другой квадр на вашем месте. ИМХО.
!!!
Смысл оставаться на тех же мозгах, которые многие ругают и прошивают с удивительными результатами в тот же APM? Я бы просто собирал другой квадр на вашем месте. ИМХО.
А что в DEVO-M плохого? Разьве что портов телеметрии нет и OSD сложнее подключить, отсутствуют логи. В остальном тот же APM. Летаю на стоковой прошивке, еще ни разу не подводил.
Другое дело Валикировские моторы, регуляторы и пластик, которые очень неочень такие.
А что в DEVO-M плохого?
Да плохого ничего, наверное, я тоже летаю и проблем не знаю, но кто-то, вон, жалуется, что до перепрошивки в APM в лойтере “девочка нервничает”, а после - как гвоздем прибитая висит. Учитывая, что уже два раза слышал такую историю, подумал, что есть тут какая-то закономерность. Ну и все эти танцы-шманцы, что у кого-то на прошивке 1.7 глюки и закидоны, а кто-то проблем не знает.
Парни, кто знает что нибудь про этот контроллер? ru.aliexpress.com/item/…/32317830333.html (не реклама)
Да плохого ничего, наверное, я тоже летаю и проблем не знаю, но кто-то, вон, жалуется, что до перепрошивки в APM в лойтере “девочка нервничает”, а после - как гвоздем прибитая висит. Учитывая, что уже два раза слышал такую историю, подумал, что есть тут какая-то закономерность. Ну и все эти танцы-шманцы, что у кого-то на прошивке 1.7 глюки и закидоны, а кто-то проблем не знает.
Значит пока нет смысла менять нормально работающий контроллер. В лоитере висит как прибитый с точностью пол метра, висит спокойно, не раскачиваясь. Даже не смотрел, какая прошивка стоит с завода.
кто знает что нибудь про этот контроллер
По описанию MiniAPM. Очень удобная компоновка применительно к W350P — можно будет обойтись без мучительной распайки. Есть стандартные выводы телеметрии на модем и OSD без всякой перепайки резисторов. Почти вдвое дешевле стандартного контроллера devo-m. Попробуйте. Нам расскажете о результатах 😉. Как раз этот вариант, наверное, сгодится как замена стандартного контроллера. Он же без модуля GPS.
А я вот такой контроллер получил. Поновее АПМ. Сначала тоже хотел АПМ на отдельную раму поставить, почитал и решил новее поставить. Рама 450. Сначала хочу просто облетать, а если понравится может и на 350 поставлю. Нравится, что GPS выносная антенна + встроенный компас и, судя по описанию, прост в настройке.
Господа, просил поделиться настройками на DEVO 10, но, что-то все молчат. Пожалуйста, сбросьте настройки пульта пункта MODEL (что на каком канале прописано) или может, можно его как-то через USB привести в первоначальное положение? Поделитесь и Вам прибудет 3 минуты дополнительных полетов на аккумулятор;).
Если 7 канал в середине, то это вроде значит что включен SimpleMode. Или попробуйте на передатчика повесить один из тумблеров на 7 канал, чтобы он реагировал и был внизу, или в МП на вкладке Config/Tuning / Copter Pids
попробуйте где Ch7 и Ch8 поставить “Do nothing” (ничего не делать).
Яков я не смог пройти по указанному пути, но нашел CH7 CH8, в Full Parametr List, там на седьмом канале прописана 3, что значит SIMPLE MODE, там мне необходимо поставить 0 я правильно понял? Но у меня все равно никакой стик ничего не переключает на 7 канале, тогда как может активироваться SIMPLE MODE если я не могу включить 7 канал?
А вот то, что прописано на переключателе MIX я могу видеть и менять в пунктах FTLMODE1-6? и например если я поменяю на вкладке FTLMODE6 шестерку на 10, то у меня будет на 2 позиции команда Loiter? только вот я не пойму почему там написано OF_Loiter?
Если вам это поможет, то есть настройки Devo 10 перешитую в Deviation. Подробнее не подскажу, поскольку ее давно продал.
что-то все молчат
Гайдар, не обижайтесь, десятки, видимо, под рукой нет ни у кого. Давайте попробуем первый курс терапии, у меня даже не Devo уже, но я попробую подсказать алгоритм.
- У меня на Devo F7 каналы 1-4 вообще поменять нельзя было (думаю, на 10ке тоже), так что тут вы не напортачите. А вот на остальные 4 канала (приемник восьмиканальный в вальке) можно навешать нужный стик или крутилку. На F7 это раздел Device output, попробуйте пощелкать эти настройки (или что-то похожее), чтобы выставить нужные стики на каналы 5-8. Проверяйте сразу в MP на подключенной валькере.
- Убедитесь, что на каналах 1-4 (ваши стики) работают Pitch/Roll и Throttle/Yaw. Это будет видно на экране калибровки. Все палочки должны двигаться в нужных направлениях, то есть - предсказуемо.
- Убедитесь, что на канале 5 работает переключатель полетных режимов и там же на вкладке калибровки меняются показания (какой вы для него выберете - уже ваше дело).
- Убедитесь, что на каналах 6-8 работают остальные переключатели (если собираетесь ими пользоваться, мне кажется на 10ке грех упускать возможность).
- Сделайте калибровку ВСЕХ переключателей и стиков.
- Выставьте настройки в MP для каналов 6-8 по своему усмотрению. Но, для начала, я бы выключил все режимы (так проще понять, в чем причина сбоев).
Отпишите о результатах, если не поможет, будем дальше думать.
Попробуйте. Нам расскажете о результатах . Как раз этот вариант, наверное, сгодится как замена стандартного контроллера. Он же без модуля GPS.
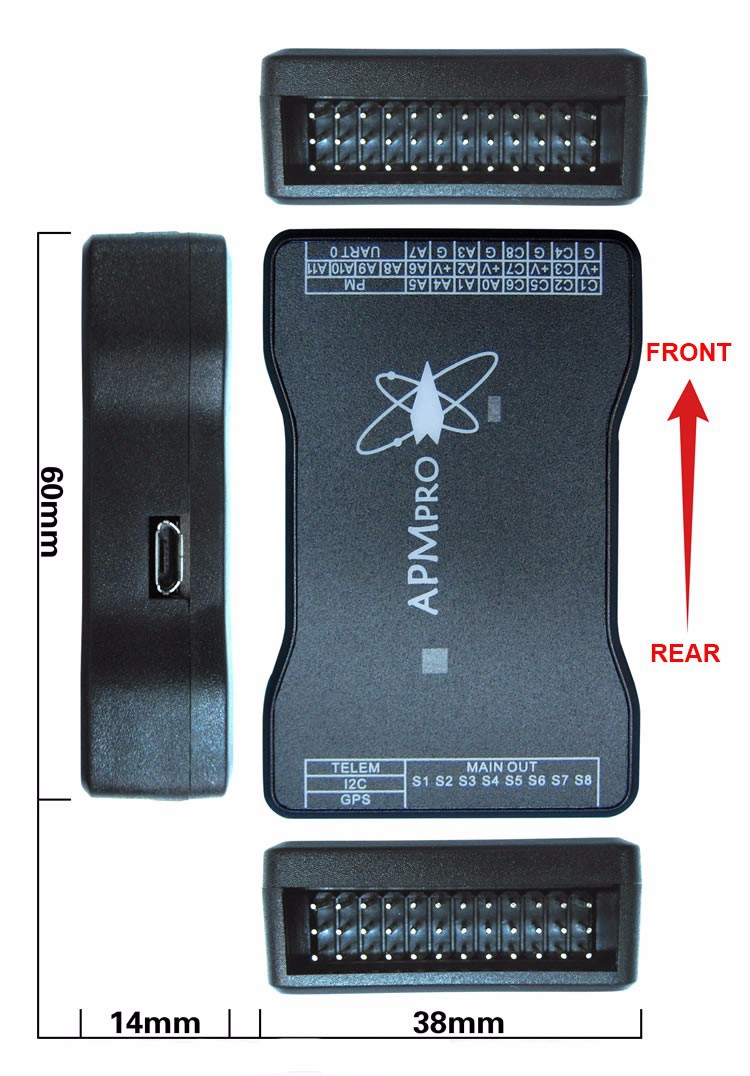
Уважаемый Евгений, не могли бы вы подсказать мне по назначению портов на этом контроллере APM PRO. Мне на днях должен прийти, но я пока не во всем разобрался. Например что за выход “12С” - это компас? Или “UART 0” для чего этот порт? Еще А8, А9, А10, А11 мне тоже не понятно. Остальное вроде понятно. Спаибо!
Добрый день всем.
Пересобрал свою вальку как писал NetWood для доработкиrcopen.com/blogs/1453/19993
Поставил приемник D8R-XP, передатчик FrSky DHT - DIY Telemetry Module , отдельный дисплейчик FrSky LCD Telemetry Display FLD-02, датчик измерения напряжения аккумулятора FrSky Battery Voltage Sensor. Все сделал как описанно в мануалах. Аппарат завелся, пошел на улицу тестить - забыл в аппе перекинуть проводв со стиков (инверсное управление было). перекинул-полетал-доволен как слон, что у меня почти все получилось.А теперь к вопросам, кто такой апгрейд делал:
- Какие настройки надо выставить на отдельном дисплейчике LCD, чтоб показывал нормальное напряжение и данные. Он у меня показывает какие-тот значения, но я их не могу ни к чему привязать, на напряжение АКБ не похоже, какие-то 5 вольт неизменяемые, время по нулям. Где-то читал и в голове отложилось, что темеметрийный модуль не будет показывать нормально если не подключить датчик напряжения UBEC и не понизить до 3 вольт, что-то там, а что и как не помню. По это фотке то-же говорится про него, но я не силен в английском

и такой фотке

Непонятно как подключается Devo-М проводов питания не увидел на него и почему он берет питание на датчик с мотора , а не непосредственно с разъема аккумулятора? - Как подключить подвес и камеру Ilook.
Я первый раз летал без подвеса т.к. не понял как его подключать. У нашего иностранца подключена камера Боскам, про ilook ничего не сказанно. Если я правильно понял то управление наклоном подвеса идет через 6 и 8 пин D8R-XP. Чел вроде не говорит какой аппой пользуется, будет это ли работать с Devo f7?
3)Как вывести видео с ilook на сам пульт. На RX-703A вывод изображения (и по моемому наклон) камеры был подключен через AUX1,а как реализовать теперь это с D8R-XP. На какие пины подключать фиговину в синей термоусадке (забыл как называется) - Провода конечно на D8R-XP коротковаты. Имеется не рабочий ноубук. В нем провода на вафлю идут с такими же разъемами и там поболее 30см, можно ли их использовать и так ли важна точность в определении длины провода (например 23,5 см).
Вот так сейчас пульт у меня выглядит, справа платка с кнопкой и светодиодом ,руки не дошли дырки насверлить в аппе
не могли бы вы подсказать мне по назначению портов на этом контроллере APM PRO
Если решили разобраться с АПМ, то самым правильным будет почитать буквари по этому поводу на copter.ardupilot.com или по-русски на apmcopter.ru. Скорей всего возникнет еще много вопросов. На форуме есть довольно бодрая ветка rcopen.com/forum/f123/topic233564 которую в принципе надо почитывать владельцам devo-m для понимания происходящего, поскольку все в нашем мире познается в сравнении. Я apm не ставил и глубоко с ним не разбирался. У меня и с родным контроллером летает замечательно. На всякий случай схема APM тут i.imgur.com/hZ5XlJS.png. Подключение GPS с встроенным компасом к APM на картинке. Аналоговые порты можно использовать, например, для подсветки или контроля rssi с приемника.

дырки насверлить
Андрей, поздравляю с переделкой. Правда ведь, так интереснее? А то тут уходят в соседние ветки, на фантики ведутся )))))
Теперь от лирике к физике:
- у вас показывается напряжение, которое получает DEVO-M и которым затем питается приемник. Это как раз около 5в, они стабилизированы и поэтому неизменны. Нужно либо датчик собирать (у Евгения в блоге, кажется, было, как это делать), либо покупать набор телеметрии FrSky, но там уж больно много всего, я бы не стал.
Devo-M подключается с BECа шнурком в разъем Check Power (вроде так называется), на нем и есть те самые 5V, от него же и приемник питается через DEVO-M (на фишке рядом с ключом (верхний пин) - данные, средний - питание 5В, нижний - земля, она дальше всех от ключа разъема). - Подвес легко: подключаете его просто в любой свободный выход приемника, на него назначаете в пульте крутилку. Удобно проверять нужный канал через серву любую. Можно, на самом деле, подключать одним проводом: один конец на данные (ближний к ключу) в приемник в нужный канал, другой - на данные (тот же принцип) в канал pitch на подвесе.
Второй канал там для управления камерой (включение -выключение) - это тот самый с синей штукой вроде. Далее он вместе с питанием собирается через соплю, которая идет на четырехпиновый разъем в камеру. Там 2 пина - управление камерой и 2 пина - питание прямо с аккумулятора, как и на сам подвес. - Видео с ilook не имеет отношения к приемнику RX703А, это только диалог камеры и приемника в пульте. Назначайте одинаковый канал на камере и в Devo F7 и будет все работать.
- Если я правильно понимаю, антенна от приемника это длинный коаксиальный кабель и маленький кончик (собственно антенна). На ноутбуке, возможно, антенна длиннее, поэтому часть ее будет проходить внутри корпуса, что не очень хорошо, наверное. Но тут лучше уже у знатоков спросить, я не силен в вопросе.
Спасибо Артем. Пока не собираюсь переходить на взрослые аппараты, сначала потренируюсь на “кошках”.
У меня на дисплее показывает вот что- привязать эти значения трудно к чему-либо
А вот такие настройки стоят.(перевернуть не знаю как)
С подвесом разберусь попозже, времени пока нет.
Давно в этой тебе не был, но нужен совет.
у меня от Валкиры 350про остался подвес который сейчас решил повесить на другой коптер. Подвес 2-х осевой Валкировский.
Полетал с ним пару раз и заметил что он плохо отрабатывает выравнивание оси которая отвечает за наклоны в лево-право (если не путаю Тангаж). Непонятно как и что, вдруг начинает клониться в стороны мотора который сбоку и так стоит какое то время, потом я квадрокоптер подергаю, немного покручу в воздухе, вроде выравнивается подвес. С развесовкой все в порядке, мотор по весу не перетягивает, камера висит ровненько по центру если не включать подвес
что то может быть? не хватает мощности? как настроить больше мощности именно на данный мотор?
или дело вообще не в мощности?
Непонятно как подключается Devo-М проводов питания не увидел на него и почему он берет питание на датчик с мотора , а не непосредственно с разъема аккумулятора?
Это не питание мотора, это как раз 4 точки - выходы с батареи, поэтому тут он напряжение и берет. Я тоже тут снимаю напряжение для переднего прожектора.
Прошу прощения, был не внимателен к первому вопросу. В данной схеме питание товарищ реализовал, судя по всему, через датчик и приемник на контроллер, а не через DEVO-M на передатчик. Не посмотрел я на картинку вашу. Тут тонкостей я не знаю, но в данной схеме мне не очень нравится то, что DEVO-M питается через два устройства. Возможно, опять же, я чего-то не понимаю и это нормально, но мне кажется, что питание контроллера должно быть максимально надежным. В случае, если питание приемник получает через датчик напряжения, можно передавать только сигнал одним верхним проводом (ближним к ключу). А вот как настроить данные на экранчике - не знаю, у меня такого экранчика нет, я на таранисе все получаю, да и метод получения у меня другой, не через датчики.