Hubsan X4 FPV H501S / Pro

ткакой пункт в прошивке отвечает за скоросто полёта в режиме GPS?
Это многих интересует. Пока ещё не докапались в прошивке до этого параметра.
Это многих интересует. Пока ещё не докапались в прошивке до этого параметра.
Ясно Спасибо))) А вы не знаете в чем тут дело? Когда привезли мне квадрик там стояла стоковая прошивка с ограничением высоты 125 метров 1.1.9. вроди эта, но не суть, когда во время полёта аккум разряжался квадрип очень плавно снижался, когда поменял прошивку на H501S-FC-V1.1.17.hbs , квадрик стал быстрее опускаться вниз?
Алексей339 - Для того и выпускают новые прошивки, чтобы оптимизировать разные параметры…но скорость снижения похоже осталась прежней.
А вообще, почитайте эту ветку…в ней конечно много флуда, но ответов Вы всё равно найдёте больше, чем сможете задать вопросов.
Да, автопосадка при разряде аккумулятора на 1.1.17 уже больше похожа на падение. По-любому это экстренный случай и им лучше не пользоваться.
[QUOTE=qwe676;6515704]
По фото разобранной камеры ничего не прнять…она как понимаю всего с одной линзой? Тогда надо искать, из-за чего “гуляло” качество изображения при изменении наклона коптера…аккуратно зубочисткой покачайте линзу и матрицу…
joxi.ru/krD476ET6KlErp
грубым анализом ничего не болтается, разбирать практически почти нечего дальше, кроме как отковырнуть шлейф с камерой от корпуса .
а чё вся матрица пошарпана?открути два самореза сзади и весь пластмас снимется.
И как с этим бороться? Только замена регуля?
Скорее всего да. Если только нет какой-нибудь устранимой причины в регуляторе типа сопли припоя и др.
… Как перепрошить знаю. сейчас в квадре стоит этаже прошивка(H501S-FC-V1.1.17.hbs), а в пульте H501s-RX-V1.2.3.hbs-(её не трогал) …
В пульте у вас последняя прошивка если не ошибаюсь.
Перед заливкой пропатченной 1.1.17 не забудьте сначала залить прошивку предыдущей версии, только потом измененнную 1.1.17
Да, автопосадка при разряде аккумулятора на 1.1.17 уже больше похожа на падение. По-любому это экстренный случай и им лучше не пользоваться.
В своей прошивке 1.1.17 среди прочего изменил порог напряжения автопосадки на смертельные 5,9 В, после чего делал проверочные полеты и обнаружил что квадрик все равно начинает упорно спускаться при 6,8 В. В связи с этим есть стойкое ощущение что в самих регуляторах моторов еще есть своя настройка защитного снижения мощности (обычно 50%) по напряжению 6,8 В.
Мой, когда на воду садился, последние показания перед выключением экрана были 6,4 В на пульте. Так что можно сказать приводнение было уже ожидаемым.
Перед заливкой пропатченной 1.1.17 не забудьте сначала залить прошивку предыдущей версии, только потом измененнную 1.1.17
Напомните пож. где 1.1.17 модифицированная лежит.
Кстати, помню тут кто-то спрашивал насчет подкидывания квадрика и запуска движков в воздухе.
вот от RCBuyer’а обзор
Напомните пож. где 1.1.17 модифицированная лежит.
Каждый сам может испечь свой вариант 1.1.17 с помощью консоли от уважаемого NumLock, ссылку не найду так сразу, поищите в его прежних сообщениях. Или скажите какие вам параметры и на что изменить - испеку и выложу.
Да! смотри видео из поста 1963. Там выкручивают вручную ноги чтоб выровнять, либо шайбы подкладывают.
Это тупо кетайский троллинг. на расцвете темы зтот вопрос на дружественном форуме поднимапся. Пытливые умы проверили все оси угломерами.
Всё ровно.
Это всего лишь зрительный эффект от неудачной формы пресс-отливки верхней крышки на заводе.
Верхняя крышка не точна. Но смещение не критично. моторы не цепляются.
А видео кетайца - тупа самопеар с шайбочками. И не летает он так нестабильно без шайб как у него на видео.😃
Но на сборке, после шума, кетайцы стали ставить ети шайбы, шоб народ успакоить. Типо зрительно всё ок - а там пох как на самом деле стало.))
Ни у кого случайно нет амперметра типа такого ru.aliexpress.com/item/…/1138800999.html чтобы измерить максимальное потребление коптера? Было бы интересно узнать чтобы понять почему пухнут родные аккумуляторы.
Ни у кого случайно нет амперметра типа такого ru.aliexpress.com/item/…/1138800999.html чтобы измерить максимальное потребление коптера? Было бы интересно узнать чтобы понять почему пухнут родные аккумуляторы.
От перезарядки. Родную, паходу, - в помойку!
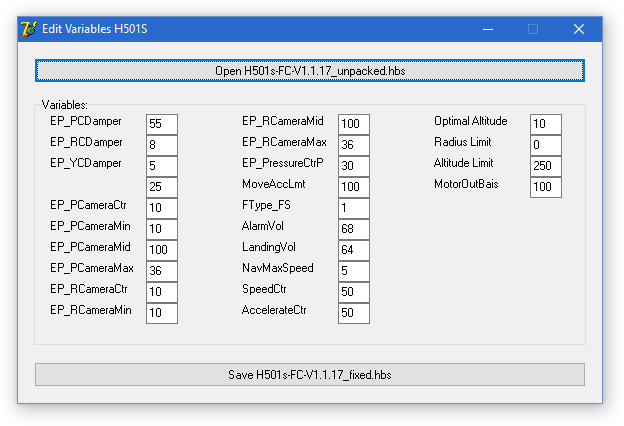
Народ кто шарит, подскажите, какой из этих пунктов отвечает за скорость полёта в режиме GPS, или его тут нет?
Ну да, как только началось постоянное клевание (частые потери управления) включил RTH и тоже долго не было понятно, перешел коптер в возврат или нет. Ну а когда квадр стал возвращаться (это можно понять только по цифрам дистанции на телеметрии) понял что происходит то, о чем здесь уже рапортовали - в RTH коптер возвращается прерывисто с остановками. Летит некоторое время и останавливается, затем снова летит. И когда связь по управления стала стабильной (как я полагаю) коптер уверенно полетел домой со скоростью под 10 м/с. Еще раз понравилась эта настройка в кастомной прошивке, и еще больше удручает что нельзя реализовать такое же увеличение скорости в GPS Mode.
Просьба к qwe676 и другим счастливым обладателям PRO пульта: можете выложить крупные фото платы пульта, желательно с двух сторон?
Сергей, почему квадрик омтанавливается? Давайте подумаем вместе…
Тогда, когда не знает что делать. Правильно?
Если он не знает что делать, значит у него нет команды, а значит она заглушена помехами, шумами, или отсутствием вобще команды с пульта. Согласны?
Почему при РТХ он останавливается?
Главная из причин - он не знает где находится. То есть данные ЖПС Или недостаточны, или не успевают обработаться его скудными мозгами.
От чего это происходит?
От Отсутствия нужного количества спутников или от того, что скорость его движения в 10м.с превышает скорость обработки позиционироваия данных со спутников.
Скорость в ЖПС у него - 5м.с. Это не с фонаря взято.
А как вы считаете, в РТХ квадрик по ЖПС летит? М?
А у вас какая скорость возврата?
Не наблюдаете диссонанса в логике действий и результате?
----------------------------------
Ещё добавлю от себя… Вот эти остановки в пути в РТХ ниразу благоприятно не сказывабтся на экономии энергии. За что тут все ратуют.
Ибо рывки и тормажения больше садят акк, чем ровный полёт. А ведь РТХ мы включаем как правило на излёте батареи. Там каждые 0.1 вольт на щету.
Да и вобщем-то 10м.с - тоже не экономная скорость, без запаса на подруливания по сносу ветром, удержанию заданной высоты и т.д.
Вот как - то так.
Народ кто шарит, подскажите, какой из этих пунктов отвечает за скорость полёта в режиме GPS, или его тут нет?
Его тут нет.
А можите написать что за что отвечает))))
А можите написать что за что отвечает))))
Какойта параметр а прошивке в виде х.з. чего.
А можите написать что за что отвечает))))
AlarmVol - напряжение начала световой индикации разряда батареи (красные вспышки на задних лучах), [вольт х 10]
LandingVol - напряжение начала автопосадки, [вольт х 10]
NavMaxSpeed - скорость возврата RTH, [м/с]
Optimal Altitude - высота возврата RTH, [м]
Radius Limit - ограничение предельного расстояния полета, [м]
Altitude Limit - ограничение предельной высоты полета, [м]
В последних двух параметрах при установке нуля их допустимые рабочие значения становятся безграничными.
Сергей, почему квадрик омтанавливается? Давайте подумаем вместе…
Тогда, когда не знает что делать. Правильно?
Если он не знает что делать, значит у него нет команды, а значит она заглушена помехами, шумами, или отсутствием вобще команды с пульта. Согласны?
Почему при РТХ он останавливается?
Главная из причин - он не знает где находится. То есть данные ЖПС Или недостаточны, или не успевают обработаться его скудными мозгами.
От чего это происходит?
От Отсутствия нужного количества спутников или от того, что скорость его движения в 10м.с превышает скорость обработки позиционироваия данных со спутников.
Скорость в ЖПС у него - 5м.с. Это не с фонаря взято.
А как вы считаете, в РТХ квадрик по ЖПС летит? М?
А у вас какая скорость возврата?
Не наблюдаете диссонанса в логике действий и результате?
----------------------------------
Ещё добавлю от себя… Вот эти остановки в пути в РТХ ниразу благоприятно не сказывабтся на экономии энергии. За что тут все ратуют.
Ибо рывки и тормажения больше садят акк, чем ровный полёт. А ведь РТХ мы включаем как правило на излёте батареи. Там каждые 0.1 вольт на щету.
Да и вобщем-то 10м.с - тоже не экономная скорость, без запаса на подруливания по сносу ветром, удержанию заданной высоты и т.д.
Вот как - то так.
Да вы Капитан))))
Речь шло о том как квад ведет себя при плохом приеме сигнала.
На зарядке которая на первой фотке, есть ли у кого возможность разобрать ее и ответить как у вас ?
На второй фотографии в разобранном состоянии, там черным кругом отмечены 2 элемента.
Так вот первый не прозваниваеться , а 2 прозваниветься на мультметре. (а у вас?)
Зарядник не работает (не заряжает. горит красная лампа и мигает зеленная.)
уже писал о подобное выше (rcopen.com/forum/f135/topic450608/1848) Вот и думаю что дело в нем…
Какойта параметр а прошивке в виде х.з. чего.
Алексей, Сорри. Без очков не правильно прочитал вопрос. Ответ не поделу.) Но вам вышё ответили правильно.
Да вы Капитан))))
Речь шло о том как квад ведет себя при плохом приеме сигнала.
Всго лишь полковник…😃
А какие тут вопросы могут быть?
Всё предсказуемо.