Hubsan X4 FPV H501S / Pro

Ни у кого случайно нет амперметра типа такого ru.aliexpress.com/item/…/1138800999.html чтобы измерить максимальное потребление коптера? Было бы интересно узнать чтобы понять почему пухнут родные аккумуляторы.
От перезарядки. Родную, паходу, - в помойку!
Народ кто шарит, подскажите, какой из этих пунктов отвечает за скорость полёта в режиме GPS, или его тут нет?
Ну да, как только началось постоянное клевание (частые потери управления) включил RTH и тоже долго не было понятно, перешел коптер в возврат или нет. Ну а когда квадр стал возвращаться (это можно понять только по цифрам дистанции на телеметрии) понял что происходит то, о чем здесь уже рапортовали - в RTH коптер возвращается прерывисто с остановками. Летит некоторое время и останавливается, затем снова летит. И когда связь по управления стала стабильной (как я полагаю) коптер уверенно полетел домой со скоростью под 10 м/с. Еще раз понравилась эта настройка в кастомной прошивке, и еще больше удручает что нельзя реализовать такое же увеличение скорости в GPS Mode.
Просьба к qwe676 и другим счастливым обладателям PRO пульта: можете выложить крупные фото платы пульта, желательно с двух сторон?
Сергей, почему квадрик омтанавливается? Давайте подумаем вместе…
Тогда, когда не знает что делать. Правильно?
Если он не знает что делать, значит у него нет команды, а значит она заглушена помехами, шумами, или отсутствием вобще команды с пульта. Согласны?
Почему при РТХ он останавливается?
Главная из причин - он не знает где находится. То есть данные ЖПС Или недостаточны, или не успевают обработаться его скудными мозгами.
От чего это происходит?
От Отсутствия нужного количества спутников или от того, что скорость его движения в 10м.с превышает скорость обработки позиционироваия данных со спутников.
Скорость в ЖПС у него - 5м.с. Это не с фонаря взято.
А как вы считаете, в РТХ квадрик по ЖПС летит? М?
А у вас какая скорость возврата?
Не наблюдаете диссонанса в логике действий и результате?
----------------------------------
Ещё добавлю от себя… Вот эти остановки в пути в РТХ ниразу благоприятно не сказывабтся на экономии энергии. За что тут все ратуют.
Ибо рывки и тормажения больше садят акк, чем ровный полёт. А ведь РТХ мы включаем как правило на излёте батареи. Там каждые 0.1 вольт на щету.
Да и вобщем-то 10м.с - тоже не экономная скорость, без запаса на подруливания по сносу ветром, удержанию заданной высоты и т.д.
Вот как - то так.
Народ кто шарит, подскажите, какой из этих пунктов отвечает за скорость полёта в режиме GPS, или его тут нет?
Его тут нет.
А можите написать что за что отвечает))))
А можите написать что за что отвечает))))
Какойта параметр а прошивке в виде х.з. чего.
А можите написать что за что отвечает))))
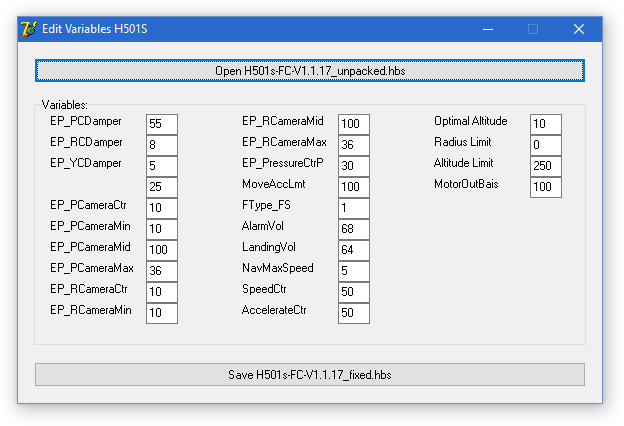
AlarmVol - напряжение начала световой индикации разряда батареи (красные вспышки на задних лучах), [вольт х 10]
LandingVol - напряжение начала автопосадки, [вольт х 10]
NavMaxSpeed - скорость возврата RTH, [м/с]
Optimal Altitude - высота возврата RTH, [м]
Radius Limit - ограничение предельного расстояния полета, [м]
Altitude Limit - ограничение предельной высоты полета, [м]
В последних двух параметрах при установке нуля их допустимые рабочие значения становятся безграничными.
Сергей, почему квадрик омтанавливается? Давайте подумаем вместе…
Тогда, когда не знает что делать. Правильно?
Если он не знает что делать, значит у него нет команды, а значит она заглушена помехами, шумами, или отсутствием вобще команды с пульта. Согласны?
Почему при РТХ он останавливается?
Главная из причин - он не знает где находится. То есть данные ЖПС Или недостаточны, или не успевают обработаться его скудными мозгами.
От чего это происходит?
От Отсутствия нужного количества спутников или от того, что скорость его движения в 10м.с превышает скорость обработки позиционироваия данных со спутников.
Скорость в ЖПС у него - 5м.с. Это не с фонаря взято.
А как вы считаете, в РТХ квадрик по ЖПС летит? М?
А у вас какая скорость возврата?
Не наблюдаете диссонанса в логике действий и результате?
----------------------------------
Ещё добавлю от себя… Вот эти остановки в пути в РТХ ниразу благоприятно не сказывабтся на экономии энергии. За что тут все ратуют.
Ибо рывки и тормажения больше садят акк, чем ровный полёт. А ведь РТХ мы включаем как правило на излёте батареи. Там каждые 0.1 вольт на щету.
Да и вобщем-то 10м.с - тоже не экономная скорость, без запаса на подруливания по сносу ветром, удержанию заданной высоты и т.д.
Вот как - то так.
Да вы Капитан))))
Речь шло о том как квад ведет себя при плохом приеме сигнала.
На зарядке которая на первой фотке, есть ли у кого возможность разобрать ее и ответить как у вас ?
На второй фотографии в разобранном состоянии, там черным кругом отмечены 2 элемента.
Так вот первый не прозваниваеться , а 2 прозваниветься на мультметре. (а у вас?)
Зарядник не работает (не заряжает. горит красная лампа и мигает зеленная.)
уже писал о подобное выше (rcopen.com/forum/f135/topic450608/1848) Вот и думаю что дело в нем…
Какойта параметр а прошивке в виде х.з. чего.
Алексей, Сорри. Без очков не правильно прочитал вопрос. Ответ не поделу.) Но вам вышё ответили правильно.
Да вы Капитан))))
Речь шло о том как квад ведет себя при плохом приеме сигнала.
Всго лишь полковник…😃
А какие тут вопросы могут быть?
Всё предсказуемо.
Сергей, почему квадрик омтанавливается? Давайте подумаем вместе…
Думаю что дело здесь в неком программном баге. Скорость возврата RTH 10 м/с отрабатывается отлично, по моему опыту и опыту других кто это пробовал.
На второй фотографии в разобранном состоянии, там черным кругом отмечены 2 элемента.
Так вот первый не прозваниваеться , а 2 прозваниветься на мультмет…
Это диоды, они прозваниваются в одну сторону, где полоска -это минус. Попробуйте поменять шупы местами.
Это диоды, они прозваниваются в одну сторону, где полоска -это минус. Попробуйте поменять шупы местами.
Да, вы правы.
Уже пропаивал контакты, которые между 1 и 2 кругом…
Что еще может быть ??
Да, вы правы.
Уже пропаивал контакты, которые между 1 и 2 кругом…
Что еще может быть ??
Может проблема в самом аккуме?
Да, вы правы.
Уже пропаивал контакты, которые между 1 и 2 кругом…
Что еще может быть ??
ещё светодиод зеленый попробуй пропаять…
У кого нибудь было такое сообщение в треке
Получен предварительный заказ(Москва)?
Что это значит?
Может проблема в самом аккуме?
Нет, без подключенного акума - горит красная лампа и мигает зеленная.
ещё светодиод зеленый попробуй пропаять…
попробую
проверьте акк, а вообще я не доверяю этим штатным зарядным, пользуюсь всегда нормальным зарядником.
ещё светодиод зеленый попробуй пропаять…
нет, не помогло.
проверьте акк, а вообще я не доверяю этим штатным зарядным, пользуюсь всегда нормальным зарядником.
Подходит любой который заряжает 7, 4 в ?
Посоветуйте хороший аналог ?
В полне достаточно такого:
hobbyking.com/…/__5548__IMAX_B6_50W_5A_Charger_Dis…
или ему подобного
Смотрю новый пункт в меню появился.
Скорость возврата RTH 10 м/с отрабатывается отлично, по моему опыту и опыту других кто это пробовал.
О как! И у кого ещё такая скорость, напомните?
Отрабатываться она конечно будет, но вот баги при такой скорости будут несомненно.
А как вы считаете, почемы кетайские инжинеры не поставили её токовой поумолчанию?
Смотрю новый пункт в меню появился.
Чёт не разобрать… Чё там?😃