Hubsan X4 FPV H501S - FAQ, инструкции, прошивки, модернизации

Мощность передатчика телеметрии коптера (RX):
V1.2.1, V1.2.2, V1.2.3
Init PAC=2, TBG=5 (-4.77 dBm)
V1.2.9
Init PAC=0, TBG=2 (-16.6 dBm)
V1.2.12, V1.2.16, V1.2.17
Init PAC=3, TBG=5 (-3.5 dBm)
V1.2.20
Init PAC=0, TBG=2 (-16.6 dBm)
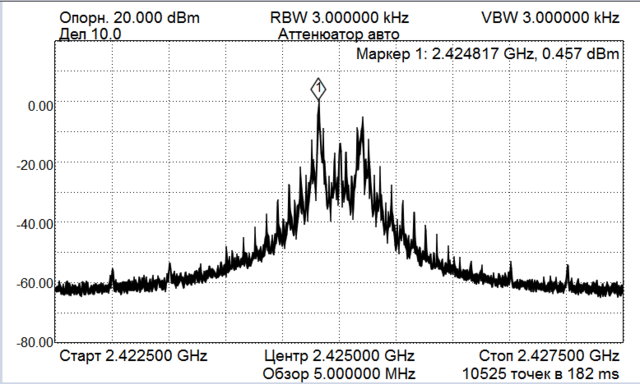
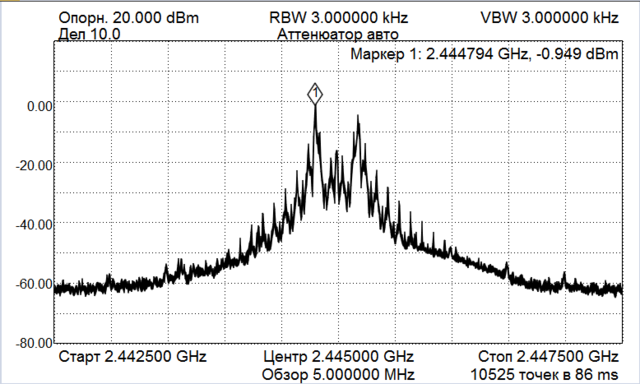
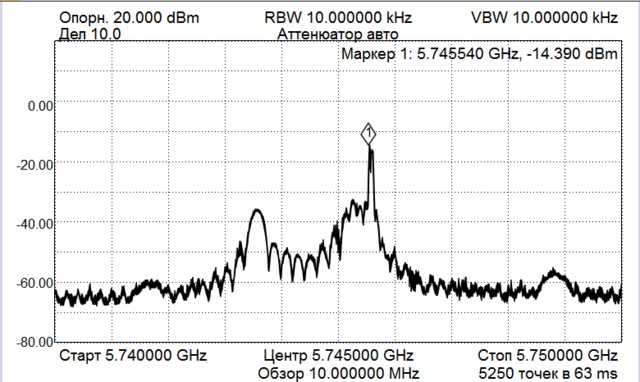
Олег, вот визуализация результатов ночной проверки
Это было ДО. Оригинальная TX 4.2.23

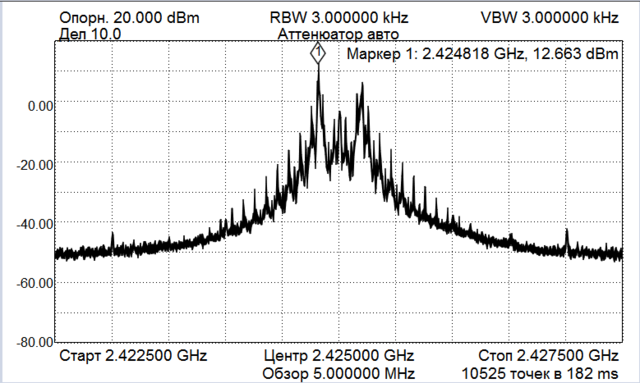
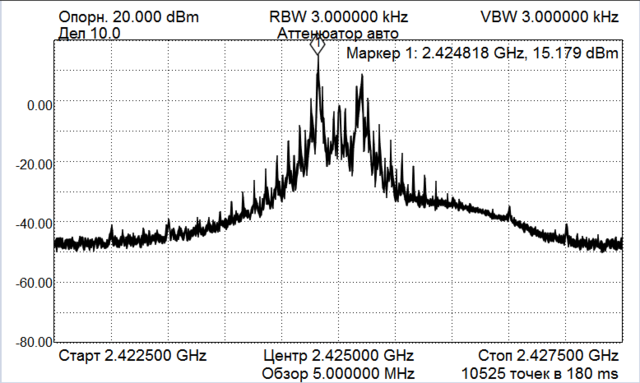
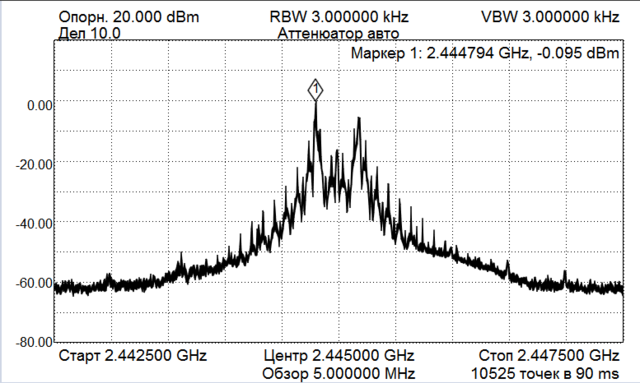
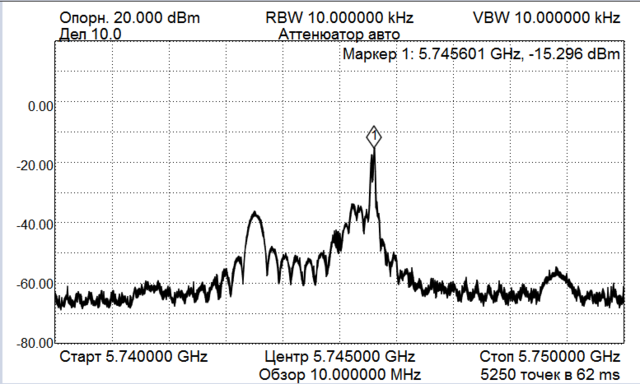
А это после. TX 4.2.23 0.1dBm
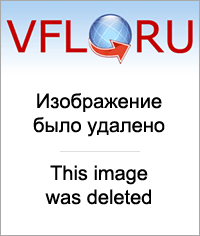
Итого увеличение мощности на 12,8 дБ (в двадцать раз) в сравнении с начальным чахлым вариантом TX 4.2.23.
Расчетный прирост предельной дальности связи - в 2,7 раза (кубический корень из роста мощности).
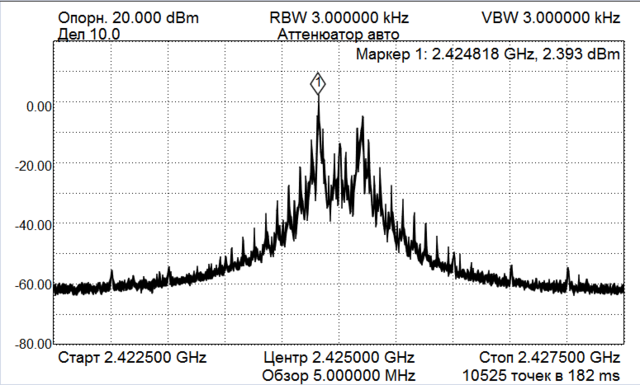
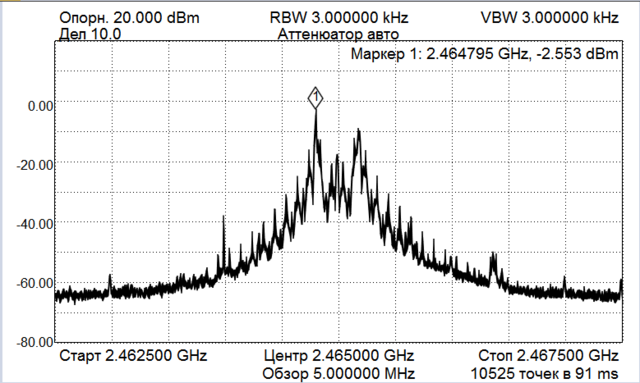
И для сравнения оригинальная “мощная” TX 4.2.19:

По сравнению с ней имеем полуторакратное увеличение мощности в TX 4.2.23 0.1dBm
Провел небольшое исследование нагрева радиомодуля 2,4 ГГц пульта при комнатной температуре и работе с оригинальной “чахлой” и разогнанной по мощности прошивке TX 4.2.23
Фрагмент платы с расположением модуля при комнатной температуре +25 град. Выключенное состояние после длительного простоя.

Спустя 15 минут работы на оригинальной прошивке TX 4.2.23 (выходная мощность около 1 мВт)

Спустя 30 минут остывания и затем 15 минут работы на модифицированной прошивке TX 4.2.23 (выходная мощность около 20 мВт)

При таком заметном увеличении мощности передатчика изменение нагрева модуля незначительное, имхо.
Кстати сильнее нагревается модуль приемника видео и какой-то чип на обратной стороне платы поблизости с разъемом шлейфа дисплея. Температура обратной стороны платы под ним гораздо выше температуры радиомодуля.

Калибровка магнетометра:
1. Задержка 100 мс
2. Собираются 10 значений показаний магнетометра по осям X,Y,Z с перерывом в 10 мс и усредняются.
3. Усреднённые значения по X,Y,X используются для поиска минимума и максимума по X,Y,Z.
4. Далее находятся разницы между максимумами и минимумами (дельты), а так же средние точки по X и Y.
magDeltaX = magMaxX — magMinX
magDeltaY = magMaxY — magMinY
EP_MagMidX = magMinX + magDeltaX / 2
EP_MagMidY = magMinY + magDeltaY / 2
5. Если дрон еще не описал полную окружность (360º) по Yaw, то происходит переход к шагу 2.
6. Из разницы между максимальным и минимальным значением (дельты) вычитается сохранённая дельта и результат сравнивается с пороговым значением 500.
magDeltaX - magDeltaX_saved > 500
magDeltaY - magDeltaY_saved > 500
Если хотя бы одна разница дельт превышает пороговое значение, происходит переход к шагу 2.
7. Если абсолютное значение любой из дельт превышает пороговое значение в 2200, то происходит переход к шагу 2.
8. Вновь полученные дельты сохраняются и происходит переход ко второй стадии алгоритма.
magDeltaX_saved = magDeltaX
magDeltaY_saved = magDeltaY
9. После поворота дрона в вертикальную плоскость аналогичным образом находятся дельта и средняя точка по Z.
magDeltaZ = magMaxZ — magMinZ
EP_MagMidZ = magMinZ + magDeltaZ / 2
10. Если дрон еще не описал полную окружность (360º) по Roll, то снова собираются и усредняются значения,
находятся максимумы и минимумы, а за тем происходит переход к шагу 9.
11. Из дельты по Z вычитается сохранённая дельта и результат сравнивается с пороговым значением 500.
magDeltaZ - magDeltaZ_saved > 500
Если разница дельт превышает пороговое значение, происходит переход к шагу 9.
12. Если абсолютное значение дельты превышает пороговое значение в 2200, то происходит переход к шагу 9.
13. Расчитывается длина вектора для текущих показаний магнетометра
EP_MagVectorLen = sqrt((magX - EP_MagMidX) ^ 2 + (magY - EP_MagMidY) ^ 2 + (magZ - EP_MagMidZ) ^ 2)
14. Вновь расчитанные значения средних точек по осям, дельт и длина вектора сохраняются в энергонезависимую память.
Калибровка гироскопа (бегающие по-кругу красные огни превращающиеся в зелёные):
1. Алгоритм ожидает пока дрон опишет полный круг во-круг своей оси.
При попадании в каждый квадрант зажигается по новому жёлтому огню.
2. Ожидается снижение ускорения по оси Z до значения < 500.
3. Задержка 1 с.
4. Расчитываются поправки к коэффициентам ортогональности гироскопа
EP_GyroOrthZx = (EP_GyroOrthZx / 10000.0 - pitch_angle / heading_angle) * 10000.0
EP_GyroOrthZy = (EP_GyroOrthZy / 10000.0 - roll_angle / heading_angle) * 10000.0
5. Если угол по pitch или по roll более 0.6 то происходит возврат к первому шагу.
Калибровка акселерометра (с мигающими жёлтыми огнями):
1. Собираются 200 значений акселерометра по осям X, Y, Z с перерывом 5 мс и усредняются.
2. Расчитываются средние точки акселерометра.
EP_AccMiddleX = EP_AccScaleX * AccX_avg / 10000
EP_AccMiddleY = EP_AccScaleY * AccY_avg / 10000
EP_AccMiddleZ = EP_AccScaleZ * AccZ_avg / 10000 — 10000
Всем привет купил недавно на aliexpress шлем бюджетный к нашему квадракоптеру подходит ru.aliexpress.com/item/…/32710943412.html
Прошивки Russian Hackers Edition с максимальной мощностью передатчика 😁
H501S FC V1.5.25 без принудительной калибровки компаса yadi.sk/d/SE1GiMfy3H5RaY
H501S RX V1.2.20 HighPower yadi.sk/d/YYJ-5KuC3H9pux
H901A TX V4.2.23 HighPower yadi.sk/d/fvHVBCyo3H9px5
В прошивках установлена максимально возможная мощность передатчика 1.3 dBm перед усилителем.
Такой мощности в штатных прошивках ранее небывало, вариант выкладывается для опробования смелыми.
Без антенны лучше не включать !
Штатная мощность передатчика телеметрии коптера (RX):
V1.2.1, V1.2.2, V1.2.3
Init PAC=2, TBG=5 (-4.77 dBm)
V1.2.9
Init PAC=0, TBG=2 (-16.6 dBm)
V1.2.12, V1.2.16, V1.2.17
Init PAC=3, TBG=5 (-3.5 dBm)
V1.2.20
Init PAC=0, TBG=2 (-16.6 dBm)
Прошивки Russian Hackers Edition с максимальной мощностью передатчика
Ээээххх,погода не летная(((ох я бы их облетел!!!НО как обычно иду за шнурком)))как только так сразу!!!
Роман, понимаю твои желания и нетерпение)) Только не флуди в этой теме пож-та ))
Добавлена поддержка H501A-FC-V1.1.36
Сравнил прошивки H901A V4.2.23 и V4.2.24.
Кроме строки с номером версии (в двух местах), различается только табличка с мощностями из семи байт, с которой я ещё до не разобрался.
В прошивке 23 в неё значения “02, 03, 04, 05, 0D, 06, 15”, в прошивке 24 в ней “02, 04, 05, 06, 07, 17, 1F”. Больше не отличается ни одного байта.
Надо разбираться что это за табличка.
V4.2.23 [**-16.6dBm, -13.2dBm, -10.9dBm, -8.9dBm, -6.3dBm, -4.8dBm, -4.77dBm]
V4.2.24 [**-16.6dBm, -10.9dBm, -8.9dBm, -4.8dBm, -2.0dBm, 0.1dBm, 1.3dBm]
Сравнил прошивки H901A V4.2.23 и V4.2.24.
Кроме строки с номером версии (в двух местах), различается только табличка с мощностями из семи байт, с которой я ещё до не разобрался.
В прошивке 23 в неё значения “02, 03, 04, 05, 0D, 06, 15”, в прошивке 24 в ней “02, 04, 05, 06, 07, 17, 1F”. Больше не отличается ни одного байта.Надо разбираться что это за табличка.
V4.2.23 [**-16.6dBm, -13.2dBm, -10.9dBm, -8.9dBm, -6.3dBm, -4.8dBm, -4.77dBm]
V4.2.24 [**-16.6dBm, -10.9dBm, -8.9dBm, -4.8dBm, -2.0dBm, 0.1dBm, 1.3dBm]
Существует режим Engineer (нажмите кнопку видео при включении передатчика), вы получите больше энергии, передаваемой в режиме Engineer с TX V4.2.13 или TX V4.2.14, но не уверены в других версиях.
There is an Engineer mode (press the video button when turn on the transmitter), you will get more power transmitted in Engineer mode with TX V4.2.13 or TX V4.2.14, but not sure about other versions.
Прошивки Russian Hackers Edition с максимальной мощностью передатчика
Я очень извиняюсь,а на пульт про. не будет ТХ усиленного?
Табличка появилась в 22-ой прошивке. В 19-ой и ранее её ещё небыло.
V4.2.22, V4.2.23:
<20% -16.6dBm
20% -13.2dBm
40% -10.9dBm
60% -8.9dBm
80% -6.3dBm
100% -4.8dBm
120% -4.77dBm
V4.2.24:
****<20% -16.6dBm
20%**** -10.9dBm
40% -8.9dBm
60% -4.8dBm
80% -2.0dBm
100% 0.1dBm
120% 1.3dBm
Сравнительные замеры мощности последних прошивок TX-RX, включая версии Russian Hack Edition (RHE) от уважаемого tpc.
Прошивки RX для H501S. Прошивки TX для стандартного пульта H901A.
Архив прошивок здесь
Стандартный пульт
H901A-TX-4.2.19
H901A-TX-4.2.23
H901A-V4.2.23-0.1dBm

H901A-V4.2.23-1.3dBm
H901A-TX-4.2.24
H901A-V4.2.24-RHE-MaxPower
Коптер
Канал телеметрии
H501S-RX-1.2.17
H501S-RX-1.2.20
H501S-RX-1.2.20-1.3dBm
H501S-RX-V1.2.20-RHE-MaxPower
Канал видео
H501S-RX-1.2.17
H501S-RX-1.2.20
H501S-RX-1.2.20-1.3dBm
H501S-RX-V1.2.20-RHE-MaxPower
Комментарии:
-
Все из представленных прошивок RX имеют одинаковую мощность видео передатчика, плюс-минус погрешность измерения.
-
Прошивки RX 1.2.20 и TX 4.2.23/24 версий RHE полностью используют возможности используемого в H501S радио чипсета, с ними передатчики коптера и пульта диапазона 2,4 ГГц имеют вдвое большую мощность даже чем у стандартных “мощных” прошивок RX 1.2.17 и TX 4.2.19.
-
Оригинальные прошивки RX 1.2.20, а также TX 4.2.23 и TX4.2.24 имеют пониженную мощность передатчика. Информация об этом уже содержалась в моих предыдущих замерах.
Всем привет. Никто не пробовал призму цеплять на камеру для вертикальной съемки? Или ничего не выйдет из-за расфокусировки?
Прошивки Russian Hackers Edition с максимальной мощностью передатчика 😁
H501S FC V1.5.25 без принудительной калибровки компаса yadi.sk/d/SE1GiMfy3H5RaY
Прошивка TX FPV2 v4.2.24 RHE в которой мощность при включении и на любой дальности остаётся максимальная (1.3dBm).
Снижается только во время бинда.
Прошивка RX S v1.2.20 RHE в которой мощность при включении и на любой дальности остаётся максимальная (1.3dBm).
Я очень извиняюсь,а на пульт про. не будет ТХ усиленного?
присоединяюсь !!! а то как лохи 😃)))
Прошивка Russian Hackers Edition полётного контроллера H501S/SS FC V1.1.36-RHE-no_mag_cal без принудительной калибровки компаса на старте
Привет всем,не могу прошить тушку с десятой винды,в чем может быть проблема?В ЮСБ неопознанное устройство,драйвера обновлял,драйвер можт для 10ки какой свой?
Прошивка Russian Hackers Edition пульта FPV1 (H906A) V1.1.9 с максимальной мощностью передатчика 2.4 ГГц (1.3 dBm).
yadi.sk/d/5Ik368dv3HMHCN