FPV миникоптеры на 250х рамах (ZMR, Blackout, QAV250 и т.п.)

Foxeer Legend 2 на подходе
www.facebook.com/FOXEER-246150382395619/

Foxeer Legend 2 на подходе
И Xiaomi новая. Но лучше бы что-то с теми же характеристиками, но формфактора Hero Session.
И Xiaomi новая
C ценой гопро)
ага с ценой чето ксюха переборщила.
Вопрос по пидам, летал на 2.1.6 и пиды настроил с помощью g-tune вышло так:
Roll 2.6/0.030/50
Pitch 6.8/0.030/50
большая разница между P по питчу и ролу, но квадрик весьма неплохо летал.
сейчас сменил прошивку, и все рекомендуют ставить для начала дефолтные пиды и потом подстраивать их. По дефолту питч и рол одинаков. Есть смысл отдельно настраивать питч и отдельно рол?
ага с ценой чето ксюха переборщила.
C ценой лажа какая то, вчера стоила чуть более 8к.
Парни, подскажите по регулям пчёлкам.
Ставлю моторы Дюсы SE2205. Есть 30А Пчёлки и едут Пчёлки 20А Про.
Какие лучше поставить на эти моторы пчёлки? На 30А вроде проц 394, а на 20А Про стоит уже 396.
Сам я знаю что и 20А будет хватать регулей, так как не дадут аки даже 80А.
C ценой лажа какая то, вчера стоила чуть более 8к
Цена взята от балды, имхо. Вчера эти фотки выкрали с официального сайта и страничку сразу удалили. Никакой инфы по камере еще нет кроме тех фотографий.
UPD. Ан нет, сегодня кое-какие данные где сравнивает с gopro HERO4 xiaomi уже дала о камере, но без цены.
Парни, может вы путаете первый Рункам? Рункам 2 намного лучше сделали. И я не видел где его бы сравнивали с ксяомкой.
Не путаю, тест делал GoPro 4 - YI - RunCam2
А с учётом, что я занимают видео 😉 можно мне верить.
На 30А вроде проц 394, а на 20А Про стоит уже 396
Нам важна только частота, а она у этих мк одинакова. Если схема регулей тоже схожа разницы какие ставить нет.
- фиксирующие вал болтики под шестигранник 1.5 мм, я не смог окрутить соответствующем ключем нормального качества, он проскальзывал в этом болтике
Тоже сорвал тот который блестящий, а черный открутился без проблем. Походу блестящий обратного вращения.
есть следы компаунда, намекающие на балансировку, но больше похожие просто на прилипшую грязь
На этот компаунд прекрасно налипает песок, что вряд ли положительно на балансе сказывается (
Сорри )) Не дюс, рцтаймер. Дюс я взвешивал ))

Вот это да, ребята на металле не экономят )) Минус грамм на провода, все равно 35 грамм
Да ппц тяжелые моторы, в итоге мой коптер на них вышел на 40 с копейками грамм тяжелее своего братца на кобрах.
Да ппц тяжелые моторы, в итоге мой коптер на них вышел на 40 с копейками грамм тяжелее своего братца на кобрах.
А ничего что 4 мотора в сумме дадут больший прирост в тяге чем эти 40 грамм? Конечно и батарейка пожираться будет быстрее, но если хочешь еще больше тяги - придется чем-то жертвовать.
А ничего что 4 мотора в сумме дадут больший прирост в тяге чем эти 40 грамм?
Компенсировать надо не вес, а тяговооруженность. Т.е. чтоб скомпенсировать 40г лишних и не потерять в динамике, надо не менее 250г тяги сверху.
Компенсировать надо не вес, а тяговооруженность. Т.е. чтоб скомпенсировать 40г лишних и не потерять в динамике, надо не менее 250г тяги сверху.
Полностью согласен. Плюс к тому надо учитывать просадку аккума, красивые цифры в 1кг тяги с одного мотора малореальны. Даже если акк может отдать 80-100 ампер, он при этом просядет вольт до 14-15. А тяга в 1кг была на 15.8-16В
Компенсировать надо не вес, а тяговооруженность. Т.е. чтоб скомпенсировать 40г лишних и не потерять в динамике, надо не менее 250г тяги сверху.
Хорошо, а какой тогда вес идеал изначально, что бы не было “потерь в динамике”? Т.е. у человека выше коптер с кобрами, который весит на 40 грамм меньше уже изначально не потерял в динамике и будет летать намного лучше второго варианта? Пустая теория, имхо.
Плюс к тому надо учитывать просадку аккума, красивые цифры в 1кг тяги с одного мотора малореальны. Даже если акк может отдать 80-100 ампер, он при этом просядет вольт до 14-15. А тяга в 1кг была на 15.8-16В
Это все итак понятно. В реальном полете далеко не те цифры, что замеряют на стендах.
Не путаю, тест делал GoPro 4 - YI - RunCam2 А с учётом, что я занимают видео можно мне верить.
Классный тест. Да уж, ранкаму больше подходит место в сегменте $30-40. А что реально удивило, я всегда ставил Yi в такой ряд по качеству картинки, Gopro 3 -> Xiaomi -> Gopro 4 Black. Но посмотрев видео я заметил, что лучшая цветопередача, я бы даже сказал единственная правильная у Xiaomi. Кто не разбирается, просто посмотрите на асфальт (у гоупро он пурпурный) и на небо (у ранкама переконраст, перенасыщенность и не тот оттенок, а гоупро просто перенасыщенное). Ранкам2 со своим сверхмаленьким динамическим диапазоном снимает откровенный брак. А так хотелось бы, чтобы камера не стояла парусом поперёк потока воздуха.
----
Пока ехала вот такая платформа я собрал самоделку проще и легче. Оцените:
У кого-то есть опыт демпфирования? Стабильнее становится квад или нет? По идее, так мелкие вибрации фильтруются и контроллер не работает с этим шумом с акселерометра.
—
А ещё заметил, в режиме baro квад резко носит вверх-вниз, это из-за неприкрытого барометра? Чем это сделать - паролоном, ватой или чем-то получше? Какой толщины?
Попутный вопрос. Если при висении коптер без ветра ползёт в сторону и назад, я это устраняю с помощью трима на пульте (также, как я это делал в Syma X5C), как мне эту поправку записать в контроллер коптера? Или может это неправильно настроен уровень? Так я калибровал акселерометр положив на коптер сверху строительный уровень.
Или может это неправильно настроен уровень?
может у вас стики не точно по центру?
Попутный вопрос. Если при висении коптер без ветра ползёт в сторону и назад, я это устраняю с помощью трима на пульте
Триммируйте стиками, вот так:
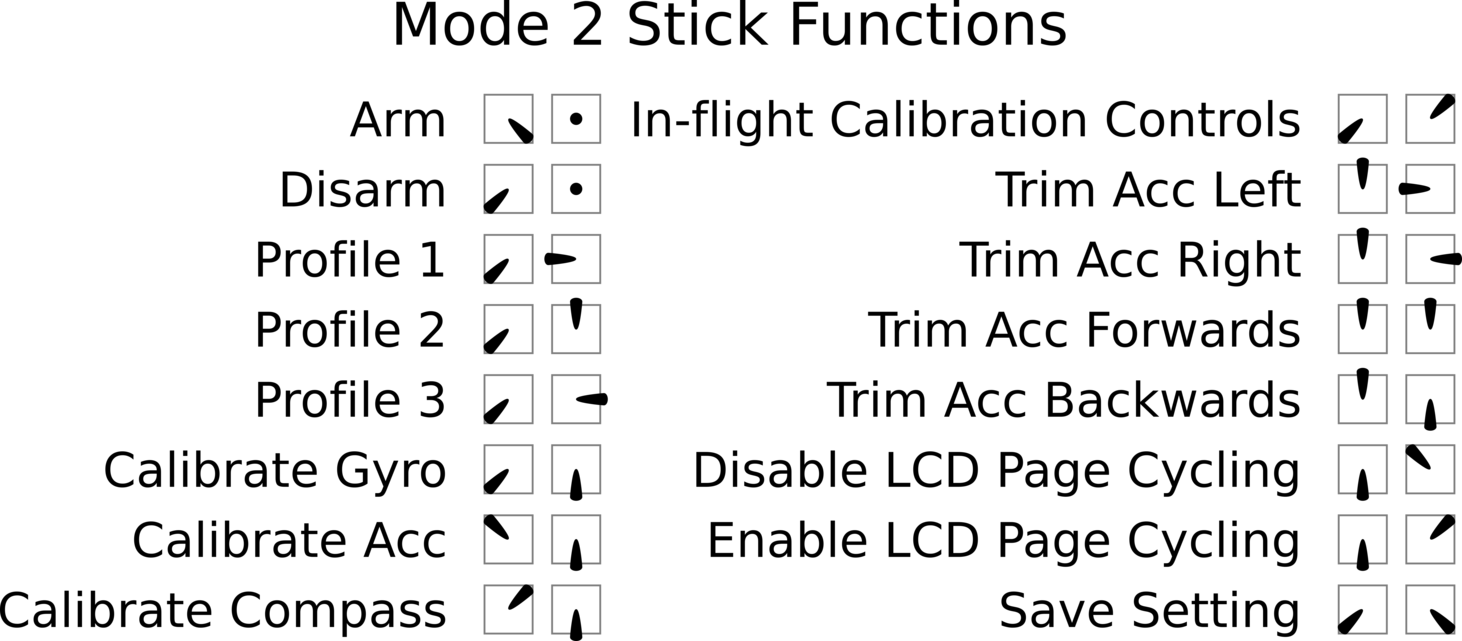
Но лучше не занимайтесь ерундой, рейсер не фантом, он никогда не висит на месте и небольшой дрифт совершенно не критичен.
А так хотелось бы, чтобы камера не стояла парусом поперёк потока воздуха.
для мелких рам действительно камеры ГоПро формата располагаются компактно, а вот как раз Мобиус формата - торчать как бушприт 😃
У кого-то есть опыт демпфирования?
на мелких ВСЕГДА ВСЕ летают без демпфирования, на некоторых современных ПК были какие-то проблемы из-за вибраций и даже кому-то удалось улучшить поведение коптера используя демпферы, но IMO демпфирование ПК это ересь, коптер должен нормально стабилизироваться без него, если это не получается - значит или проблемы с датчиками в ПК или чрезмерные зашкаливающие вибрации у ВМГ
А ещё заметил, в режиме baro квад резко носит вверх-вниз, это из-за неприкрытого барометра?
отключи барометр и проблемы не будет 😉 он тут не нужен
Если при висении коптер без ветра ползёт в сторону и назад, я это устраняю с помощью трима на пульте
НИКОГДА не пользуйся тримами на пульте
в CF/BF по умолчанию диапазон управляющего сигнала от приемника должен быть 1000-2000 с центром 1500, добейся этого настройками аппы и больше никогда ни как не меняй
если коптер плывет не сильно - забей, в полете это не мешает и он и не должен висеть как прибитый
если сильно откалибруй аксель на ровной поверхности, если продолжает плыть подложи с этой стороны что-то тонкое под коптер и опять откалибруй - это общий подход
или как написал тигромух тримами акселя - это подход для CF/BF