Прошивки CleanFlight/BetaFlight для полетников

Подскажите правильную калибровку пчелок в связке с BF3.
Стандартно: сигнал на максимум, подал питание, сигнал на минимум. Далее проверяем запуск каждого из моторов. Неоднократно писал в этой теме 😃
У меня постоянно пчёлки не запускаются после выставки руками 1000-2000 в регуляторах, начинают работать только после калибровки.
У меня постоянно пчёлки не запускаются после выставки руками 1000-2000 в регуляторах
Естественно. Хотя бы 1020-2000 ставьте и потом даже калибровка не нужна.
Стандартно- это на 3 канал и так далее… правильно?
Дык Радиолинк врет, в разных режимах свои длительности, в основном на верхнем диапазоне. Ответ- надо менять Радиолинк не принимается, сам знаю 😃
Естественно. Хотя бы 1020-2000 ставьте и потом даже калибровка не нужна.
И так ставил, этот “гад” не уходит в ноль по газу после взлета.
А минимальный газ в бетафлае 1050 примерно стоит при этом? Аирмод не включен?
Минимальный газ всякий пробовал выставлять в том числе и 1050, взлетал в Ангеле.
Взлетает шустренько, газ в ноль и он висит, так слегонца баражирует, там явно газа не 1050.
Вот чего ещё не досмотрел?
Подскажите правильную калибровку пчелок в связке с BF3
я последнее время калибрую через BLHeliSuite. хз но бывает калибруется не верно, а в BLHeliSuite это видно по цифрам и можно повторить калибровку
там явно газа не 1050
Значит надо очистить логи. Один раз взлететь с таким происходящим секунд на 15 и слить лог - посмотреть.
Стандартно- это на 3 канал и так далее… правильно?
Нет, неправильно. Нужно через конфигуратор и мозг. Ведь нам надо подружить сигналы мозга с чтением их регуляторами. Поэтому так:
- Снимаем пробы
- Входим на вкладку Motors, и включаем переключатель Arming
- Передвигаем слайдер Master вверх на максимум
- Подаём питание от батареи
- Ждём когда регуляторы закончит петь и войдут в режим калибровки
- Переводим слайдер Master вниз на минимум
- Ждём подтверждения от регуляторов.
- Проверяем раскрутку моторов по очереди. У меня обычно моторы стартуют при 1012.
Если после этого посмотрите через BlHeliSuite значения мин и макс в регуляторах - почти во всех будут разные значения, это нормально.
MinThrottle я обычно ставлю в 1050.
Нет, неправильно.
Спасибо, сделал правильно, все ESC прописались одинаково 1020-2020.
Но проблему мою это увы не решило, видимо глюк контроллера. Ну не везет мне на полетные контроллеры- с назой был глюк и вот опять. Пока Тарот радует- не реклама, а констатация факта в отдельно взятом хобийном индивидууме 😉
А барометр точно выключили? Просто ни разу такого не было, правда все контролеры Акро без барометра и компаса.
Но проблему мою это увы не решило, видимо глюк контроллера
Лог из блекбокса есть?
Барометр отключен, изучаю как достать лог и наверное надо будет снова взлететь.
Сейчас перепишу лог что есть, блин как долго выкачивает.
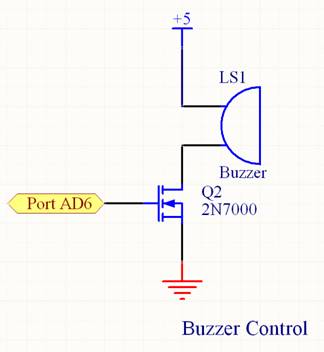
Сделал сборку Betaflight 3.0 для Openpilot Revolution, у которой на 5-м моторном выходе buzzer, а на 6-м LED Strip.
Вдруг кому-то надо. Сегодня на ней летал, все работает.
Для buzzer, естественно, требуется полевой транзистор N-типа, я использовал BS170
Но проблему мою это увы не решило, видимо глюк контроллера.
Пропишите еще в CLI команду set min_check=1020
Суть в том, чтобы поставить как можно меньше, но чуть выше минимального уровня стиков на вкладке receiver. Если там 1000, то можно ставить и 1010. И еще установите min_throttle поменьше, например, 1050
Мда, лог ни о чем. Теперь до следующего полета, но вот когда…
8 Мб это на сколько минут или секунд при 1К логин рейт, успею взлететь? Или точнее успею ли отключить питание.
успею взлететь?
Более чем. Давайте уже лог, аж интересно стало что у вас такое 😃
Мда, лог ни о чем.
А почему не о чем?
Из-за чего могут идти зерна на экране когда завожу моторы?
из-за помех 😃
попробуйте подальше разместить провода камера-OSD, OSD-VTX от регуляторов или использовать экранированные провода
Более чем. Давайте уже лог, аж интересно стало что у вас такое
Работа, погода, а самому то как интересно. Надеюсь вечером.
У airbot f4/flip32 f4 починили пищалку =) Спасибо AndWho с рцгроупс
Как же мне ее не хватало ))
Сделал сборку Betaflight 3.0 для Openpilot Revolution, у которой на 5-м моторном выходе buzzer, а на 6-м LED Strip.
Вдруг кому-то надо. Сегодня на ней летал, все работает.
А вы бы добавили в исходники, чтоб Борис это прикрутил в прошивке. Сделать бы еще VBAT
А вы бы добавили в исходники, чтоб Борис это прикрутил в прошивке. Сделать бы еще VBAT
Развитие таргета REVO идет каким-то странным путем. Под этим таргетом работают всякие левые платки типа airbot f4/flip32, как выше в сообщении Кариёзного монстра. А там баззер разведен туда, куда в настоящей REVO подключен второй светодиод, и цеплять туда баззер неудобно. Не знаю, как тут быть.
А насчет VBAT - там же он и так есть и корректно работает. Current/sonar port, pin4
Но надо паять резисторный делитель, это программно не сделаешь 😃
Я кстати на выходных писал кипятком, летая на BF 3.0 на плате BlueJayF4 с MPU6500, установленной на силиконовых кольцах.
Управление просто безумно четкое, на регулях Aikon SEFM моторы работают очень гладко и тихо. Пиды при этом стоковые, добавил только рейты.
На батарее Drone Labs 1500mAh летал между деревьями на средней скорости, время полета 12 минут (!!!). Есть подтверждающее видео.
У меня старый коптер столько не висел. На графенах 1000 - 8 минут, 1300 - 10 минут. Сказал бы мне кто, не поверил бы.
Даже если пободрее летать, как было на следующей день, выходило не сильно меньше, минут 11.
Коптер весит 337 грамм без батареи (но со всем остальным), рама QAV210 текстолит, моторы Кобры 2204 2300kv. В блекбоксе линии гиры достаточно малошумные.
Второй коптер с Revo (MPU6000) без колец, вес легче, 305гр, рама QAV210 карбон, моторы ZMX V2, но при этом летал меньше. Но у него и моторы подзуживают, надо попробовать тоже на кольца поставить. Блекбокс пока не смотрел.