Прошивки CleanFlight/BetaFlight для полетников

Ну вот и ура. Просил фичу - получил фичу
Макс… это давно уже есть в RF, по тумблеру, прикинь =), но ты молодец, что попросил!
Залил сегодня 3.1.5 в CC3D свой старенький. Проблему с моторами после арминга устранили. 6 Канал с PWM приемника теперь работает. По SBUS тоже все работает. На стоковых пидах можно висеть. Но при движении происходят колебания некоторые - надо поднастроить…
Внедряют разрабы плановую систему. Появилась страница с планом выхода будущих версий и есть прогресс бар готовности к выходу.
Версия 3.4 аж 2019 год, а 3,2 готова на 52 процента и выход 31 октября 2017 года.
github.com/betaflight/betaflight/milestones
Подскажите, выпадает вот такая ошибка в Blhelisuite при попытке подключения квадрика
Надо дисконнектнуться из бетафлайта сначала, ком порт занят.
Надо дисконнектнуться из бетафлайта сначала, ком порт занят.
Вот я дно( Спасибо)
Прошился через ftdi (использовал ардуино нано) на бету 3.1.0, закрыл демонстратор, отключил от юсб. После этого он всегда включается в режиме замкнутого бутлоадера (синяя лампочка не горит), хотя сам он не замкнут. Соответственно по юсб устройство не определяется, а по ftdi конфигуратор бетафлая (и клина тоже) не дает перейти в сам конфигуратор (но видит, к какому компорту пдключен). Подозреваю, что снес бутлоадер,если так, то как мне его вернуть, а если нет, то что случилось?
Подозреваю, что снес бутлоадер
В STM32 бутлоадер прошит жестко - его нельзя снести. Скорей всего проблема с драйверами. Без прошивки контроллер подключается по DFU, с прошивкой он уже ACM CDC.
Уважаемые профи, подскажите.
Собрал новый квадрик, отлетал пару акков, все гуд. Потом после падения не хочет армится, акк переткнешь, армится и летает. Интенсивно полетаешь чуток до первого падения, опять тоже самое.
Спокойно летаешь вроде нормально. Можно предположить, что аксель уплывает, но у меня в ведена команда set small_angle = 180 , да и аксель вообще выклключил. Летаю в помещение, снег исключен.
Подключаю народный ф4 к конфигу, в нижней строке показывает ошибку - I2С error: 1
Как можно узнать об этой ошибке?
На гитхабе поискал в командах, что ни чего не увидел о выводе ошибок.
Можно предположить, что аксель уплывает, но у меня в ведена команда set small_angle = 180 , да и аксель вообще выклключил.
Кроме акселерометра там еще и гироскоп - уплывает он обычно. У меня было похожее, но после сброса по питанию не восстанавливался пока не откалибруешь гироскоп. При этом при подключении к конфигуратору и нормальном положении квадрика - конфигуратор “рисовал” что он стоит боком.
там еще и гироскоп - уплывает он обычно
при подключении к конфигуратору и нормальном положении квадрика - конфигуратор “рисовал” что он стоит боком.
Это относится к акселю! Он у меня выключен, т.е. картинка квадрика в конфиге стоит мертво, когда квадрик крутишь в руках.
Сергей, акселерометр чувствителен к ускорениям а гироскоп как раз за вращениями следит
Всем привет. Мозг Revo. Прикрутил к мозгу бузер, в настройках BF 3.1.5 настроил Battery Voltage, откалибровал, но бузер при просадке и полной разрядке аккумулятора молчит. В FPV всё показывает. Бузер нужен для полётов без FPV. Подскажите, куда копать?
Интенсивно полетаешь чуток до первого падения, опять тоже самое.
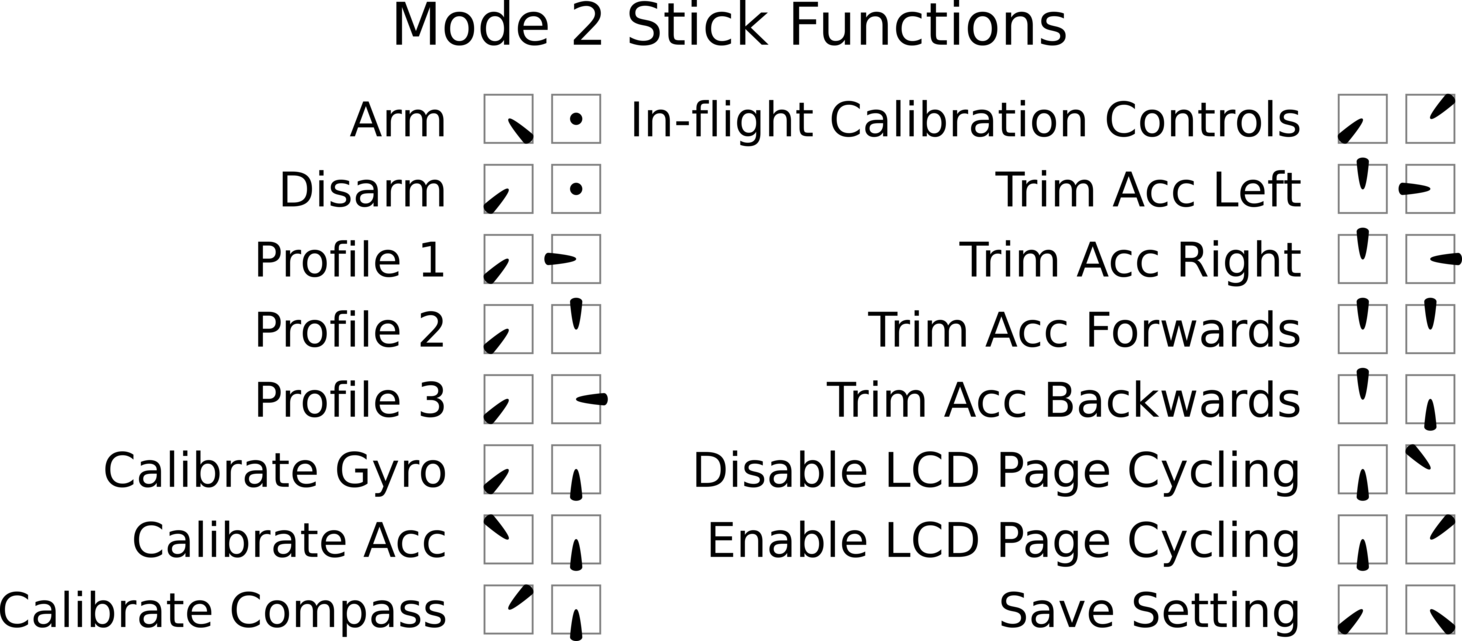
Попробуйте после падения (когда перестанет армится) положить на ровное место и откалибровать гироскоп стиками. Вот схема:
А в BF 3.1.5 работает LED STRIP? Подпаял на выходы по схеме полетника Revo F4 Не могу разобраться, как диоды настроить.
У меня на пятом моторе запаян led, тогда работает
Хотел попробовать понастраивать пиды, но P adjusment не работает (значения не меняются) D и I нормально реагируют, хотя D меняется сразу очень на большие значения…
Перестроил на другой тумблер - все стало меняться… наверное что-то в настройках не так настроил
с прошивкой он уже ACM CDC
можете носом в драйвер ткнуть, не могу найти
можете носом в драйвер ткнуть, не могу найти
При запуске Zadig есть выбор драйвера
Попробовал сегодня первый раз в жизни настраивать пиды)) занятие очень увлекательное… особенно в режиме air mode. В нем вроде получается настроить чтобы ничего не дергалось, но при этом коптер не очень резок. Если настроить по-резвее - начинает дергаться. Может на 3s робокэт и не должен быть сильно шустрый… В режиме horizont от осциляций не удалось избавиться… и быстрыми не назовешь их и медленными тоже… Но больше всего не понравилось что коптер уплывает по yaw по часовой стрелке (( В конфигураторе на экране стоит не шевелясь…
При подключении биппера по такой схеме-
он пищит когда включается от AUX, но также и когда мигает красный диод на ПК. При включении биппера в бетафлай, диод также начинает мигать. Как понимаю это замыкание выводов процессора, но обнаружить его не удается.
Вопрос- можно программно отключить красный диод на SPF3 ?