Прошивки CleanFlight/BetaFlight для полетников

Если используете GPS - используйте iNAV
чесслово, целый вечер потратил на установку INAV на своем Matek F405-OSD, но процесс зависает на надписи “очистка EEPROM” при заливке INAV. и дальше не идет. только BF и могу залить. Я уже могу преподавать курсы скоростного запуска коптера на BF на этой плате.
поэтому и понадеялся на новый релиз BF.
процесс зависает на надписи “очистка EEPROM” при заливке INAV. и дальше не идет.
А если без Full Erase лить и потом сразу в дефолт сбрасывать чтобы “мусор” от предыдущей прошивки убрать?
попробую. а как потом в дефолт сбросить правильно, чтобы никакие сопли не оставить после предыдущих конфигураций?
прямо ща и попробую. через пару минут отпишусь
Спасибо за совет. без очистки чипа прошивка залилась.
как теперь сбросить все настройки правильно?
аа… вроде как нашел. Это набрать “defaults” в CLI.
Возможно ошибся веткой, но показалось, что мне сюда, если ошибся, покажите где спросить)
Так вот. Хочу купить OSDшку, в них ничего не понимаю, какую взять, чтобы с betaflight работала? Или может на каком-то конкретном ПО надо смотреть? Вобщем, помогите советом, пожалуйста, а то боюсь купить не того чего-нибудь
Так вот. Хочу купить OSDшку, в них ничего не понимаю, какую взять, чтобы с betaflight работала?
у вас остальные комплектующие есть уже? какие? все перечислите… и лучше в эту тему:
rcopen.com/forum/f136/topic503456
Понял, пошёл туда, спасибо)
Но шкала, как я уже говорил, пустая с самого начала. ХЗ, перепроверю вечером настройкиЮ конечно. На каком-то из первых RC она у меня точно работала.
Всё работает - это я рукожоп. 😁 Всё-таки не была прописана ёмкость аккума в настройках - видимо, после крайнего сброса-настройки забыл прописать (я там несколько раз перешивал и перенастраивал). Попробую завтра полетать с одним динамическим фильтром гиры (статические отключены, notch-D включен).
ничего удивительного. Бывает 😉 “И на старуху бывает проруха.” (с)истина народная.
обновился до 3.2.0 с РЦ. теперь не пищат регули при включении пищалки. какой командой их можно включить?
какой командой их можно включить?
beeper_dshot_beacon_tone = 0 (по дефолту в релизе)
Allowed range: 0 - 5
собрал коптер на SPracing F3, скачал betaflight, прошил его, подключил приемник с PPM (приемник от “слона” rockwell), в конфигурации выставил PPM rx input - все заработало, каналы забегали. Отошел на несколько минут, вернулся и все пропало! каналы в программе не отображаются, приемник работает исправно, передатчик тоже, но на стики нет реакции. Пробовал перепрошить, скинуть настройки, оставить другой приемник с PWM - реакции на стики нет - помогите пожалуйста разобраться, всю голову уже сломал!!!
это лучше в другую тему. прошивка тут не причём. как вариант полётник заменить. может порт сдох.
Коптерами не занимался с год. Прошил 3.2.0 в DoDo. Не могу понять, как выставить газ AIR MODE’а. Смысл был такой, что на трехпозиционнике: 1. Режим без AIRMODE и пропы останавливаются при стике газа в нуле. 2. Режим AIRMODE и пропы крутятся при стике в нуле. 3. AIRMODE + CAMERA ANGLE.
В регуляторах крайние точки 1040 1992. В контроллере min_command = 1000, min_throttle = 1050. Как сделать, чтобы было по-старому? Просто обычно взлетал и садился в режиме без AIRMODE.
Все, вспомнил. Юзал опцию MOTOR STOP и тогда поведение мне привычное.
И как работает airmode_start_throttle = 1350, он всегда AIRMODE врубает при превышении этого газа или вкупе с режимом по тумблеру?
игрался с rc interpolation во вкладке приёмника в 3.2.0 делал прямо с надетыми пропеллерами (дёргал придавливая квад за крышу к столу, стиками небольшие отклонения чтоб не вырвался) и заметил такой неприятный баг.
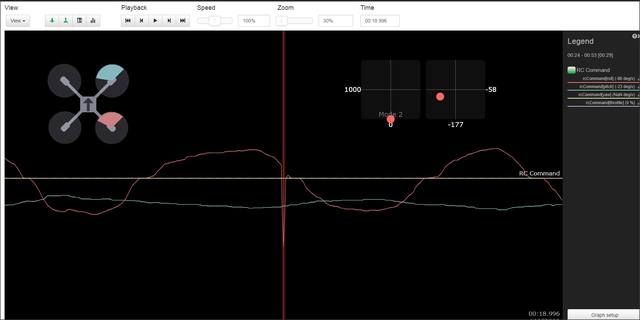
по роллу происходит рывок двигателя. это чё вообще??
по яву тоже бывает, но пики раза в 3 меньше!
что при интерполяции 14, что на авто - ситуация не меняется
по роллу происходит рывок двигателя. это чё вообще??
по яву тоже бывает, но пики раза в 3 меньше!
Это он вырваться пытался 😃
игрался с rc interpolation во вкладке приёмника в 3.2.0 делал прямо с надетыми пропеллерами (дёргал придавливая квад за крышу к столу, стиками небольшие отклонения чтоб не вырвался) и заметил такой неприятный баг.
для чего трогать rc inerpolation? - это последнее по-моему, что вообще нужно трогать… если нужно вообще… или я ошибаюсь?
по роллу происходит рывок двигателя. это чё вообще??
по яву тоже бывает, но пики раза в 3 меньше!
что при интерполяции 14, что на авто - ситуация не меняется
глюки приёмника. или помехи.
у меня что то подобное было. но хуже. квад в полёте глючило. и дизармило. поменял раму и регуляторы. глюк прошёл. возможно регули давали помехи.
для чего трогать rc inerpolation? - это последнее по-моему, что вообще нужно трогать… если нужно вообще… или я ошибаюсь?
Теоретически эта фича позволяет снизить задержку в управлении. А на практике у меня получаются смешные числа, так что наверное да:
это последнее по-моему, что вообще нужно трогать…
Кстати, на таранисе можно вдвое снизить задержку по управлению просто ограничив число каналов до 8
глюки приёмника. или помехи.
у меня что то подобное было. но хуже. квад в полёте глючило. и дизармило. поменял раму и регуляторы. глюк прошёл. возможно регули давали помехи.
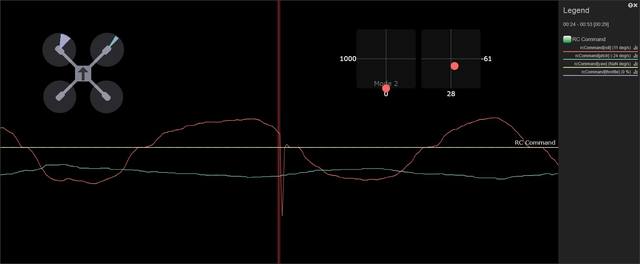
там глюк повторяющийся. маленький пик по питчу когда стик даёшь вверх и вот этот провал по роллу. возможно есть какой то sweet spot как тут .
www.youtube.com/watch?v=SysXl1Od4QI
тоесть проблема тут не в мозгах. Но на другом кваде с другим приёмником я такого не замечал…
тоесть либо стик глюкает, либо приёмник (но как приёмник может настолько точно глюкавить с такой повторяемостью?) …
рц интерполяцией думал чтото такое аномальное сгладить можно…
надо более точно бы изучить второй квад где глюков нет.
пульт at9s, приёмник где глючит r12dsm, там где вроде как норм - r9ds
а. всё. на втором кваде похожая хрень.

Кто подскажет, может встречались с таким?
Прошил полетник на 3.2.0, обновил блхелисьют до …904 версии - теперь не могу никак прошить/настроить регули. Не хочет никак соединиться через com порт. Все время пишет ошибку. Что делать?
блхелисьют до …904 версии