пробовал с разными моторами 615 и 715 при работе моторов идет какой то посторонний гул.
А это не звуковая сигнализация через движки?
Немного оффтоп.
Подскажите пожалуйста, имеется аппаратура Futaba T7C с протоколом FASST.
Есть ли возможность ей управлять Вупом? Все приёмники на них FrSky и подобные.
Может, ретранслятор какой есть)
Beecore V2.0 и собрал на базе E011 коптер.
Но есть вопрос, пробовал с разными моторами 615 и 715 при работе моторов идет какой то посторонний гул
Попробуйте Motor PWM frequency = 16000 в настройках (или в cli set motor_pwm_rate = 16000)
Так то летает, но с гулом.
Звон небольшой? Я летаю нормально с ним.
Попробуйте Motor PWM frequency = 16000 в настройках (или в cli set motor_pwm_rate = 16000)
Спасибо помогло!
Нашел как Joshua Bardwell про этот параметр говорит.
Может подскажешь, как бортовые огни на ПК Eachine Beecore V2.0 заставить моргать при батарейке ниже 3.3v
не может его сетап летать 4-5минут. Разве что висеть на 70% газа с толстым акком.
У него рама с моторами весит столько сколько весь мой коптер (без камеры). И у меня летает 3.5 минуты на моторах 0703 15000кв и акком 300mah.
Конечно, если нужно время полёта, то 15000кв. Но зависит от веса аппарата. То есть или коротко, но бодро, или подольше, но “висеть”. Так как 1-2минуты не вариант, то значит 15000кв. 😃
4 минуты вполне бодрого полета (хронометраж по ролику) на 15000кв.
Что такое команды ? Есть то что нужно прописать с CLI, это для всех видов моторов
set gyro_kalman_q = 300
set gyro_kalman_r = 80
Вот на них выдает ошибку…
Вы какую из прошивок в EVO заливаете?
Может подскажешь, как бортовые огни на ПК Eachine Beecore V2.0 заставить моргать при батарейке ниже 3.3v
Тоже интересно, можно ли вообще
set gyro_kalman_q = 300 set gyro_kalman_r = 80 Вот на них выдает ошибку… Вы какую из прошивок в EVO заливаете?
Я заливаю прошивку из ссылки выше для своего полетника, соотношение “kalman_q = 300 set gyro_kalman_r = 80” определяет частоту на которой фильтр будет работать, какую он может выдавать ошибку не очень понимаю, цифры ни на что не влияют, они задают рабочую частоту фильтра. А как у вас это проявляется ? И какая у вас прошивка ?
Нужна одна из этих www.dropbox.com/sh/…/AACL4vbqG9L88HTu0-fgewy5a?dl=…
столкнулся аналогичной ситуацией - оказалась дело в разъеме подключения к АКБ (он грелся ) , заменил разъем сейчас летает как раньше.
Спасибо! помогло.
Приветствую всех! А не подскажите, есть ли рамы подобные е010 и е011, но для моторов 820? Лежат несколько комплектов таких моторов и 2 полетника F3 evo, пробовал собирать на 100мм раме, но видимо без защиты я летать пока не способен, остался последний комплект пропов, за 2 дня в хлам убил 2 десятка.
есть ли рамы подобные е010 и е011, но для моторов 820?
Спасибо! Тоже поискал на Али, нашел и 75, и 85мм рамки, причем отправляют сразу по 2 штуки, но мой полетник не влезет в 75мм точно, насчет 85 не уверен, попробую заказать
но для моторов 820?
Есть (qx70, kingkong tiny7), но летает это все ужасно из-за маленьких пропеллеров. Я выбросил.
Есть (qx70, kingkong tiny7), но летает это все ужасно из-за маленьких пропеллеров. Я выбросил.
А маленькие это сколько? У меня 55мм, может это не мои криворуки виноваты, а размер пропов?😃))
Маленькие - это 40. На 55 все хорошо будет.
Но вы же хотите раму в стиле TW? Они только с маленькими пропами.
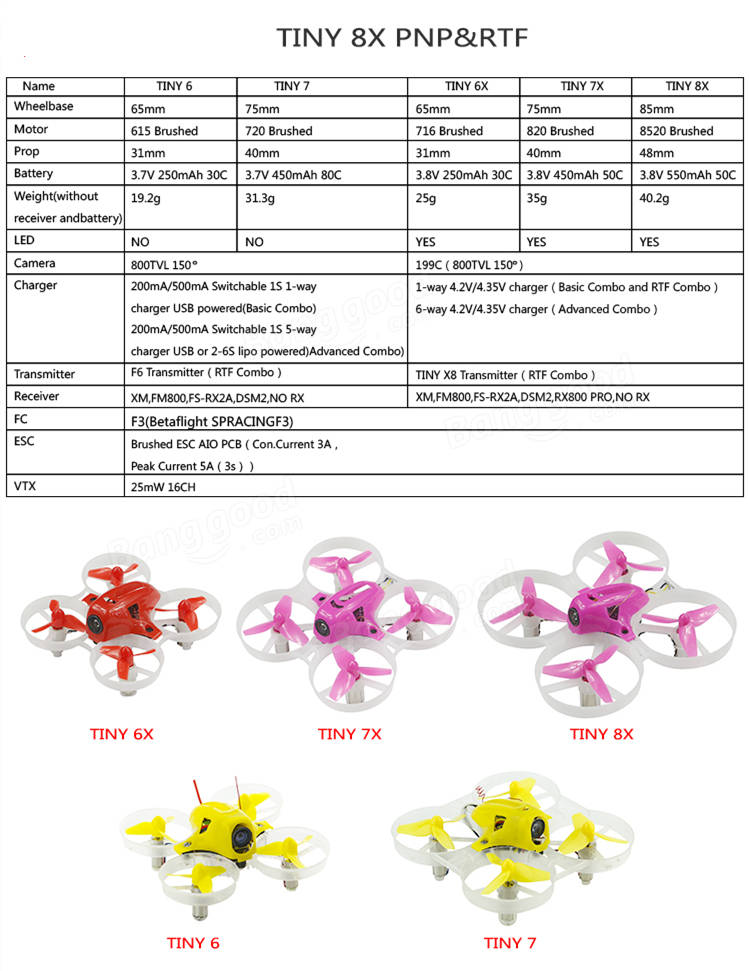
tiny 8x - новинка, хотел бы сам его попробовать, но не настолько, чтобы тратиться. Думаю, что неудачная модель будет.
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"45a734c83df9550077786db5":{"_id":"45a734c83df9550077786db5","hid":19680,"name":"nppc","nick":"nppc","avatar_id":null,"css":""},"481073743df955007777b8ce":{"_id":"481073743df955007777b8ce","hid":33848,"name":"J_MoToR","nick":"J_MoToR","avatar_id":null,"css":""},"48c40d043df9550077777a0a":{"_id":"48c40d043df9550077777a0a","hid":38160,"name":"pashteton","nick":"pashteton","avatar_id":null,"css":""},"4a5b4f383df955007776c20f":{"_id":"4a5b4f383df955007776c20f","hid":50835,"name":"kostya1973","nick":"kostya1973","avatar_id":null,"css":""},"4ca2369a3df955007775bfe4":{"_id":"4ca2369a3df955007775bfe4","hid":72447,"name":"SrgM","nick":"SrgM","avatar_id":null,"css":""},"4ff82d983df955007774267e":{"_id":"4ff82d983df955007774267e","hid":122061,"name":"MrMax836","nick":"MrMax836","avatar_id":null,"css":""},"501d74a63df95500777415e0":{"_id":"501d74a63df95500777415e0","hid":123307,"name":"Сергей_Уж","nick":"Сергей_Уж","avatar_id":null,"css":""},"55d31caa3df955007771a5a5":{"_id":"55d31caa3df955007771a5a5","hid":231707,"name":"MFer","nick":"MFer","avatar_id":null,"css":""},"56c5928b3df955007771404c":{"_id":"56c5928b3df955007771404c","hid":246187,"name":"Talentfrei","nick":"Talentfrei","avatar_id":null,"css":""},"58bf388c3df9550077708ac1":{"_id":"58bf388c3df9550077708ac1","hid":274252,"name":"vfak","nick":"vfak","avatar_id":null,"css":""},"58fdd4793df955007770747b":{"_id":"58fdd4793df955007770747b","hid":280943,"name":"Watson-I","nick":"Watson-I","avatar_id":null,"css":""},"5956a3683df9550077705586":{"_id":"5956a3683df9550077705586","hid":290873,"name":"R2Dmitry","nick":"R2Dmitry","avatar_id":null,"css":""},"5959fcf63df95500777054d8":{"_id":"5959fcf63df95500777054d8","hid":291162,"name":"sonar3e","nick":"sonar3e","avatar_id":null,"css":""},"596216773df9550077705228":{"_id":"596216773df9550077705228","hid":292051,"name":"We-BEER","nick":"We-BEER","avatar_id":null,"css":""},"5a0872953df9550077702278":{"_id":"5a0872953df9550077702278","hid":309634,"name":"VinsentT34","nick":"VinsentT34","avatar_id":null,"css":""}},"settings":{"can_see_ip":false,"can_report_abuse":false,"can_see_hellbanned":false,"forum_can_view":true,"forum_can_reply":false,"forum_edit_max_time":30,"forum_can_close_topic":false,"forum_show_ignored":false,"forum_mod_can_delete_topics":false,"forum_mod_can_hard_delete_topics":false,"forum_mod_can_see_hard_deleted_topics":false,"forum_mod_can_edit_posts":false,"forum_mod_can_pin_topic":false,"forum_mod_can_edit_titles":false,"forum_mod_can_close_topic":false,"can_vote":false,"forum_mod_can_add_infractions":false,"forum_topic_title_min_length":10,"forum_reply_old_post_threshold":30,"votes_add_max_time":168,"forum_show_post_interval":7,"can_see_deleted_users":false},"section":{"_id":"61c9a54c3df9550077bb5207","hid":136,"title":"Мини и гоночные коптеры до 300мм","parent":"61c9a54c3df9550077bb51fe","description":"","is_category":false,"is_votable":true,"is_writable":true,"cache":{"topic_count":265,"post_count":107629,"last_post":"66d6a0aa3627b35af438344c","last_topic":"66cc53c4563b07d603eeab5d","last_topic_hid":572531,"last_topic_title":"Квадрокоптер Walkera Rodeo 150 биндинг приемника","last_ts":"2024-09-03T05:37:46.223Z","last_user":"491ea1623df95500777757b6"}},"topic":{"_id":"56a754e63df9550077e738ac","hid":443500,"title":"FPV нанокоптеры на рамах до 100мм","views_count":970835,"last_post_counter":10752,"cache":{"post_count":10554,"first_post":"56a754e63df9550077e73bd1","first_ts":"2016-01-26T11:13:42.000Z","first_user":"526bef643df95500777309f7","last_post":"61c41e333df9550077e7907a","last_post_hid":10752,"last_ts":"2021-12-23T06:58:59.000Z","last_user":"5e69dbb23df95500776f5e74"},"st":1,"section":"61c9a54c3df9550077bb5207"},"subscription":null,"pagination":{"total":10554,"per_page":25,"chunk_offset":7340},"posts_list_before_post":["paginator","datediff"]},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}