Eachine Tiny QX90 90mm Micro FPV Racing Есть владельцы ?

Ребята, если не сложно, дайте конфиг на дево7е с прошивкой девиэйшн под дсм2 для данного аппарата или подскажите как настроить. В квадрокоптерах нуб . Заранее спасибо
Вроде бы со всем разобрался кроме одного. В клинфлайте все работает и армится, но вот когда отключаю от компьютера и подсоединить акк, то синий светодиод просто мигает после инициализации и не хочет армиться , если подцепить шнурок, то арм проходит, светодиод загорается. Такое ощущение что где то питание не доходит
Проверь акб заряд
Аккумулятор полностью заряжен, тоже думал что в нем дело
Ну может кто подкинет идею? Арм прошёл с помощью усб шнурка, отлетел аккумулятор, когда посадил, выяснилось что он разрядился до 3х вольт. В клинфлайте есть отсечка по напряжению? Может он не хочет армиться потому что в кф 2s стоит? Есть там что то подобное?
П. С. Перемычка на полетнике запаяна на 1s
Можетпрошить бетафлай.
Смотри во вкладке конфигурации параметр vbat
Пришли пропы Walkera - они супер! Квадрик стал летать лучше. Но все равно нужно подкрутить ПИД - раскачивает квадрик, но на стоковых пропах было еще хуже. Но большой вес от аккумулятора и 3 стяжки для крепления камеры. Нужно наверное напечатать крепление для камеры - может вес будет меньше.
QX90 с моторами на 2S, аккумулятор 2S 300мАч 25С, камера TX02 (200мВт) - время полета по офису - 4 минуты. Если поставить камеру TX01 (25мВт) то время полета должно увеличиться. Пришла камера TX01 но пробовать неохота, нужно отпаивать 😦 Я TX01 брал на стоковый QX90 который так пока и не пришел 😦 На банге сказали что выслали по новой.
Ну может кто подкинет идею?
для начала откалибровать газ
если начальное значение во вкладке ресивер больше 1050(вроде) то армится не будет
например у вас во вкладке ресивер
roll 1050 1950
pitch 1055 1976
yaw 1060 1990
trhottle 1070 1980затем заходим в cli вводим
rxrange 0 1050 1950
rxrange 1 1055 1976
rxrange 2 1060 1990
rxrange 3 1070 1980
sav
и да…прошить бетафлай тоже рекомендую (видео инструкция на пред.странице, шил по ней всё получилось)
PS ещё посмотрите, правильное ли чередование каналов
Смотри во вкладке конфигурации параметр vbat
vBat у меня без параметра, там только переключатель либо включен мониторинг батареи либо нет. Может как то можно через командную строку изменить значение? Летает до просадки и после на аккумуляторе 2,9в. С армом разобрался, нужно было выставить расходы в пульте не 100, а 125. Теперь все работает. Остался вопрос про отсечку.
Остался вопрос про отсечку.
Вот теперь включай парамерт vbat и настраивай какую отсечку тебе нужно
Нет у меня настройки параметров vBat
Нет у меня настройки параметров vBat
прошивай Betaflight. Не пожалеешь.
Человеки! Хоть у кого-то QX90 висит стабильно в воздухе без типания туда-сюда на пол метра?
Человеки! Хоть у кого-то QX90 висит стабильно в воздухе без типания туда-сюда на пол метра?
Без камеры - висел очень стабильно. Навесил камеру, начал плавал: надо увеличивать ПИДы.
Но вот при посадке прыгает как мячик 😦 ну так же как и большой брат на новых прошивках.
Без камеры - висел очень стабильно. Навесил камеру, начал плавал: надо увеличивать ПИДы.
Но вот при посадке прыгает как мячик 😦 ну так же как и большой брат на новых прошивках.
А какой параметр крутить посоветуете?
С армом разобрался, нужно было выставить расходы в пульте не 100, а 125.
тоесть. Любые полумеры
Лишь бы не калибровать аппу! У меня висит стабильно в хоризонт и англ. в акро и должен прыгать. Это норм. В акро не висят- в акро двигаются ( вы же не висите на самолете)
А какой параметр крутить посоветуете?
Я думаю что нужно немного поднять П и Д пока и посмотреть реакцию. Я где-то выше выкладывал разницу между стоковыми настройками и настройками QX90 из коробки. С дефолтным ПИД я даже не мог нормально взлететь и колбасило его из стороны в сторону, сильно влияло расположение акка. Как только установил ПИД как у стокового (идущего от производителя) коптер стал очень четкий и послушный. Но вот установил камеру и опять поплыл чуток, заменил пропы на Walkera и стал получше. Получается что в первую очередь надо увеличивать П ну и можно следом чуток поднять Д. Поэксперементируй.
У меня висит стабильно в хоризонт и англ
а можно уточнить понятие стабильно. Скажем если стик крена и тангажа бросить на 3 секунды провисит примерно на одном месте, или его за 3 секунды уже куда нибудь уволочет?
А какой параметр крутить посоветуете?
я поставил трехлопастные пропы 4 х 4.5
или его за 3 секунды уже куда нибудь уволочет?
уволакивает немного…но это нормально
можно попробовать тримернуть акселерометр если сильно плывёт
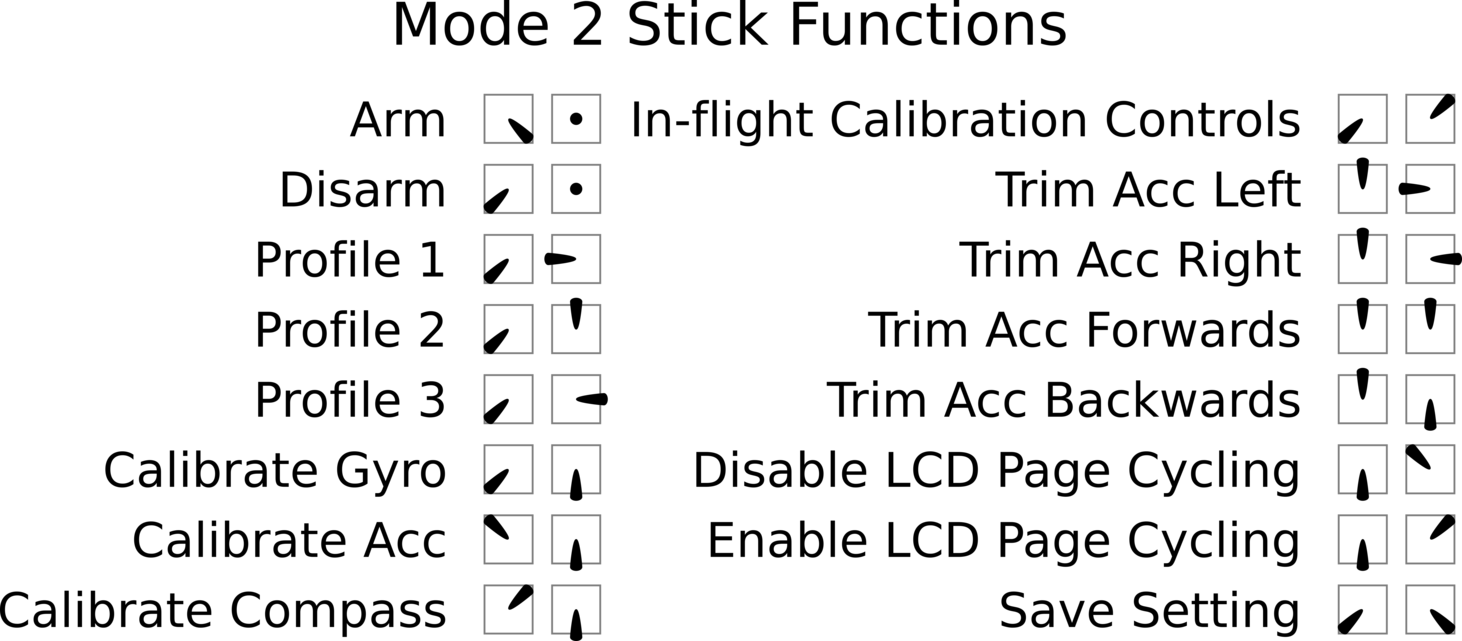
подробнее
github.com/cleanflight/cleanflight/…/Controls.md
ещё посмотреть джиттер(дрожание около нуля) на каналах крен/тангаж/разворот и поставить дедбэнд
(тоесть если среднее значение гуляет на пару пунктов, поставить deathband 3-4