savage xs

Одинаковые движки с разным KV отличаются только числом витков. Чем больше витков тем ниже KV (и момент). Но выше допустимое напряжение.
Зависимость между об/в обратная. Писал выше. Момент прямо пропорциален току через обмотку и количеству витков (именно от количества витков зависит магнитная индукция этой катушки). Кроме этого, от количества витков прямопропоциально зависит генерируемая противоЭДС, которая, когда достигает величины питающего напряжния “останавливает” ток в обмотках (т.е. ток становится равным 0). Т.е. чем больше витков, то тем ниже обороты холостого хода.
Момент и KV связаны напрямую. Чем выше момент на валу тем выше обороты на холостом ходу, момент на это и расходуется.
Извиняюсь, но рассуждения этого не понял. Напоминаю на всякий случай, что при вращении двигателя постоянного тока на холостом ходу, момент на нем равен нулю (в чисто теоретической ситуции с идеальным двигателем и ток тоже равен нулю).
Выше описал, зависимость как раз обратная, при условии протекания одинакового тока.
Число полюсов (2 4 6 8) - это по сути электромеханический редуктор. Чем больше полюсов тем ниже KV но выше момент. Если двухполюсник принять за двигло “без редуктора” то четырехполюсник будет “с редуктором на 2”
Здесь полностью согласен.
Вообще, думаю, теория сходна с обычными коллекторные двигателями постоянного тока постоянным возбуждением. От неё и стоит отталкиваться. Только сегодня прочитал вот это. Вспомнил слегка, чему учили. Кроме этого еще недавно на форуме статьи проскочили, там еще три в продолжение.
Привет всем,
Перебрал я всю модель после пляжа, я незнаю как люди катаются по песку, это просто УЖОС!!! Песок был везде. Вроде всё нормально, уже сделал тестовый заезд, единственное, что мне не понравилось - это изменившийся звук, появилось много металического лязга в районе мотора и шестерёнок. У меня был запасной “редуктор” (возможно я ошибся в терминах и он называется по другому), с разборки у Джени, я его и поставил, там совсем небыло смазки. Как бороться с этим шумом?
Подскажите вот такие пиньены
Hot Racing HPI Electric Savage XS 28t 30t 32t 34t pinion gear set SSXS8024
подойдут для спура
Hot Racing HPI Electric Savage XS steel 32t 56t idler gear SSXS3256
на таком двиглеHOBBYWING EZRUN 3656 3400KV RC Brushless Motor ?
Лучше давать ссылками.
Пиньоны и спур подойдут. В стоке в коробке и стоят пиньон 28Ти спур 32/56. А вот остальные пиньоны могут понадобиться, только если двиг не будет греться. И на 2с это будет или на 3с? Я бы себе взял другой набор пиньонов 24-26-28-30 со спуром 32/60. А к чему выбирать заранее, если в ките есть 24т со спуром 32/60 и 28т спур 32/56. Попробуйте на них, а там и понятно будет, что лучше для того двигателя
Как бороться с этим шумом?
Бороться? Зачем. Наслаждаться надо! 😁
Ну, конечно, если это шум идет от изношенных чашек коробки. Бороться с ним можно только их заменой (правда существуют и более изощренные 😵 способы). Помогает не надолго.😃 Поэтому и остается только расслабиться и получать удовольствие.
А если еще серьезнее, то диагностику очень сложно провести по словесному описанию звука. Проверяйте, может какой подш развалился или близок к тому, а может на какой шестерне зубов не хватает. Прецеденты случались😒
А к чему выбирать заранее, если в ките есть 24т со спуром 32/60 и 28т спур 32/56
Как раз я кит и заказал. Только в описании нет на башне такой инфы. Я думал и спур и пиньон надо полюбому брать.
Я же не зря перебирал, кроме очистки от песка, было заменено: все чашки привода, подши, в дифах все шестерни проверены, зубья пересчитаны, всё на месте, “коробка-редуктор” вообще новая, из нз. Старая полностью целая, только вся в песке, отмою в бензине, заменю слиппер и оставлю прозапас.
Я про звук не зря пишу, он не такой как у нового и не такой как у годичного, мне есть с чем сравнивать, оба в наличии. У меня возникли подозрения что, что-то я сделал не так.
В комплекте есть и под 2с и 3с батареи. Получается можно получить три комбинации: те что выше выше написал и еще пиньон 28 со спуром 32/60. А вот пиньон 24Т к спуру 32/56 не подойдет уже. Там в мануале все нормально написано, с картинками)))
Кажись я перебдел, только что послушал ещё раз и помоему всё стало как надо. Скорее всего шестерни притирались или смазку по дифам раскидывало )))
Что-то при торможении странно. А двигатель точно в нужное положение установлен?
Зависимость между об/в обратная. Писал выше.
Что значит обратная?
Момент прямо пропорциален току через обмотку и количеству витков (именно от количества витков зависит магнитная индукция этой катушки). Кроме этого, от количества витков прямопропоциально зависит генерируемая противоЭДС, которая, когда достигает величины питающего напряжния “останавливает” ток в обмотках (т.е. ток становится равным 0). Т.е. чем больше витков, то тем ниже обороты холостого хода.
Выше описал, зависимость как раз обратная, при условии протекания одинакового тока.
Правильные утверждения но неправильный вывод.
Два одинаковых двигателя. Питаются одинаковым напряжением.
У одного 10 витков намотано толстым проводом, у другого 20 проводом потоньше.
На одинаковом напряжении (это как раз наш случай) ток через 10 витков будет значительно выше (меньше активное сопротивление, меньше индуктивность), обороты будут выше примерно в два раза, момент тоже (противоЭДС меньше). Одинаковый ток при равном питающем напряжении никак не получится.
Идеальный двигатель с 10ю витками, запитанный от 10В будет вести себя практически также как и с 20ю витками, но записанный от 20В.
Отсюда вывод - чем больше KV тем больше и момент и мощность. (при равном количестве полюсов и одинаковом типоразмере естественно)
Причём забавно, я утверждаю:
Одинаковые движки с разным KV отличаются только числом витков. Чем больше витков тем ниже KV (и момент). Но выше допустимое напряжение.
На что получаю:
Зависимость между об/в обратная.
Но тут же дальше абсолютно верное утверждение:
Т.е. чем больше витков, то тем ниже обороты холостого хода.
А ничего что KV (обороты на вольт) это по сути обороты холостого хода, поделённые на питающее напряжение?
Вы не запутались ли?
Зависимость между об/в обратная.
Извиняюсь, пропустил пару слов. 😮 Читать в след. редакции:
Зависимость между об/в и моментом обратная.
Т.е при более высоких об/в (соответственно меньшем количестве витков) момент, развиваемый при одинаковом токе (при сравнении двух двигателей), будет ниже.
Вы не запутались ли?
Да вроде, нет 😎.
Считаю, что ток отдельно от развиваемого момента вообще нельзя рассматривать.
Что-то при торможении странно. А двигатель точно в нужное положение установлен?
Двигатель установлен штатно. Как у стока. Пиньён не менял.
Всем привет.
Саваж простоял около месяца наверно. В эти выходные взял покатать. Минут 15 все было ок, потом изредка колеса стали залипать в крайнем левом положении, а иногда переставали реагировать на руль. При этом газ и свет работали ок. Когда залипало или не рулилось, от сервы никаких посторонних шумов. Непонятно что то. Если залипало в крайнем левом положении, то если пнуть по передним колесам, опять работает. Если перестает реагировать на руль, то только включение/выключение пульта помогает. Куда копать пока не соображу. Все глюки эти происходят спонтанно…
Самое простое, это заменить серву и посмотреть что будет. К стати, у меня похожее было на жуке от турниджи, но там проблема была в АППЕ GT3C, окислились контакты на рулевом колесе, после того как почистил контакты, всё заработало.
2 telegkin, Dx! я Вас немного по-утомляю формулами, но, думаю, это поможет нам всем понять и разобраться.
Итак уравнение механической характеристики ДПТ НВ, а именно ДПТ НВ и является наш БК, только конструктивно “вывернутый на изнанку”.
или в другой форме
где ω — частота вращения, рад/с;
U— напряжение, приложенное к цепи якоря, В;
Ф — магнитный поток, Вб _- он у нас величина постоянная, т.к. магниты постоянные;_
М - момент развиваемый двигателем, он же момент сопротивления;
R— сопротивление якорной цепи, Ом_:
I - ток якоря, А;
_ k— конструктивная постоянная двигателя, которая в свою очередь равна
где р— число пар полюсов двигателя;
N — число активных проводников якоря двигателя;
α — число параллельных ветвей обмотки якоря.
Возьмем случай простой волновой обмотки (у нас встречается чаще всего) для которой произведение два-пи-альфа всегда равно два-пи, а N равно числу витков.
Нам понадобится еще одна формула - это формула момента, вот она:
М=k*Ф*I
Итого, что мы имеем со всего этого?
- Момент двигателя не зависит от приложенного напряжения. Только от тока якоря и от конструкции двигателя. Причем момент тем больше, чем больше количество витков и/или полюсов.
- А вот что касается kV… Как видно из первой формулы член U/kФ (иначе называемое - частотой идеального холостого хода) тем меньше, чем больше р и N. т.е. параметр обороты-на-вольт уменьшается с ростом числа полюсов и/или витков.
- Что касается приложенного напряжения. Как видно из приведенного выше, ток якоря не зависит от приложенного напряжения - он зависит только от момента сопротивления на валу, и конструкции двигателя (I=М/kФ, смотря что нам задается: ток или момент). Т.е. чем больше мы грузим двигатель - тем больше тока он ест. От напряжения зависит только частота идеально холостого хода и, соответственно, обороты при заданном токе (моменте) - “высота” характеристики.
- Сопротивление якорной цепи - чем меньше - тем выше обороты при заданном токе/моменте и тем более жесткая характеристика .
- Максимальное допустимое напряжение определяется только электрической и тепловой стойкостью изоляции, способностью двигателя рассеивать тепло и механической прочностью его конструкции.
- Максимальный ток, который может протекать по обмотке двигателя, как правило многократно превышает его номинальные параметры. Поэтому утверждение, что “двигатель больше тока не возьмет” - неверно. Приведу пример: моторчик Scorpion SII-2212-960kV имеет длительный (рабочий) ток всего 13 А. Сопротивление его обмоток 0,139 Ома. При максимальном возможном моменте (т.е. при котором двигатель останавливается) и оборотах равных 0 ток на трех банках лития превысит 100А (если регулятор и аккумулятор смогут его отдать)! Естественно, это приведет к почти мгновенному разрушению обмотки, но тем не менее…
Еще раз повторю, сказанное выше относится к простой волновой обмотке якоря, т.к. для других типов обмотки может не выполнятся условие 2а=2 и N может не быть равным числу витков…
Плюс еще существуют нюансы того как регулятор управляет двигателем на разных режимах из-за чего поведение реальной машины может несколько отличаться.
Если где-то наглючил - прошу сильно не пинать.
Куда копать пока не соображу.
Потенциометр возможно, раскидай серву, посмотри чо там, почисти…
Пиньён не менял.
А стоило. Зубья то уже по степени износа разные, соответсвенно и их форма. И звук тоже, скорее всего из-за этого
Еще раз повторю, сказанное выше относится к простой волновой обмотке якоря, т.к. для других типов обмотки может не выполнятся условие 2а=2 и N может не быть равным числу витков…
Но характер зависимости не изменится. Меняться будут только коэффициенты
Т.е при более высоких об/в (соответственно меньшем количестве витков) момент, развиваемый при одинаковом токе (при сравнении двух двигателей), будет ниже.
Только ток в нашем хоббийном применении одинаковым не будет.
Да вроде, нет 😎.
Считаю, что ток отдельно от развиваемого момента вообще нельзя рассматривать.
Хоббийный привод управляет напряжением. Ток зависит от напряжения.
- Момент двигателя не зависит от приложенного напряжения. Только от тока якоря и от конструкции двигателя. Причем момент тем больше, чем больше количество витков и/или полюсов.
Но ток зависит от напряжения. Закон ома.
Нажимая на курок газа вы управляете именно напряжением. Неужели момент не зависит от курка газа?
- А вот что касается kV… Как видно из первой формулы член U/kФ (иначе называемое - частотой идеального холостого хода) тем меньше, чем больше р и N. т.е. параметр обороты-на-вольт уменьшается с ростом числа полюсов и/или витков.
Всё верно.
- Что касается приложенного напряжения. Как видно из приведенного выше, ток якоря не зависит от приложенного напряжения - он зависит только от момента сопротивления на валу, и конструкции двигателя (I=М/kФ, смотря что нам задается: ток или момент). Т.е. чем больше мы грузим двигатель - тем больше тока он ест. От напряжения зависит только частота идеально холостого хода и, соответственно, обороты при заданном токе (моменте) - “высота” характеристики.
Что же по вашему зависит от напряжения то? Дело в том что ток, который двигло может взять с регуля для обеспечения момента на валу, ограничен напряжением. За счет этого эффекта мы и регулируем курком момент/скорость.
- Сопротивление якорной цепи - чем меньше - тем выше обороты при заданном токе/моменте и тем более жесткая характеристика .
Это очень важно. Вы формулу написали, но пользоваться ей не пробовали. Примените её к хоббийным движкам.
- Максимальное допустимое напряжение определяется только электрической и тепловой стойкостью изоляции, способностью двигателя рассеивать тепло и механической прочностью его конструкции.
Да. Всё верно. В нашем случае перегрев выходин на первое место.
- Максимальный ток, который может протекать по обмотке двигателя, как правило многократно превышает его номинальные параметры. Поэтому утверждение, что “двигатель больше тока не возьмет” - неверно. Приведу пример: моторчик Scorpion SII-2212-960kV имеет длительный (рабочий) ток всего 13 А. Сопротивление его обмоток 0,139 Ома. При максимальном возможном моменте (т.е. при котором двигатель останавливается) и оборотах равных 0 ток на трех банках лития превысит 100А (если регулятор и аккумулятор смогут его отдать)! Естественно, это приведет к почти мгновенному разрушению обмотки, но тем не менее…
Я это утверждал?
Если где-то наглючил - прошу сильно не пинать.
А теперь от теории к практике.
Вот линейка движков:
hobbyking.com/…/__23356__Turnigy_TrackStar_4_5T_Se…
hobbyking.com/…/__23358__Turnigy_TrackStar_5_5T_Se…
hobbyking.com/…/__23360__Turnigy_TrackStar_8_5T_Se…
hobbyking.com/…/__23361__Turnigy_TrackStar_10_5T_S…
Хороша тем, то выдано довольно много параметров. Нам этого достаточно чтобы применить вашу первую формулу, не добавив ничего от себя.
Рассчитаем по первой формуле момент. Момент на заданных оборотах.
www.dropbox.com/s/bbl7n4w341o795c/torque.png
Эта формула дает нам возможность построить график зависимости момента от оборотов. Что мы и сделаем для этих четырех двигателей.
www.dropbox.com/s/v2aqx5naqlh23sz/torque.xlsx
www.dropbox.com/s/…/torque_graph.png
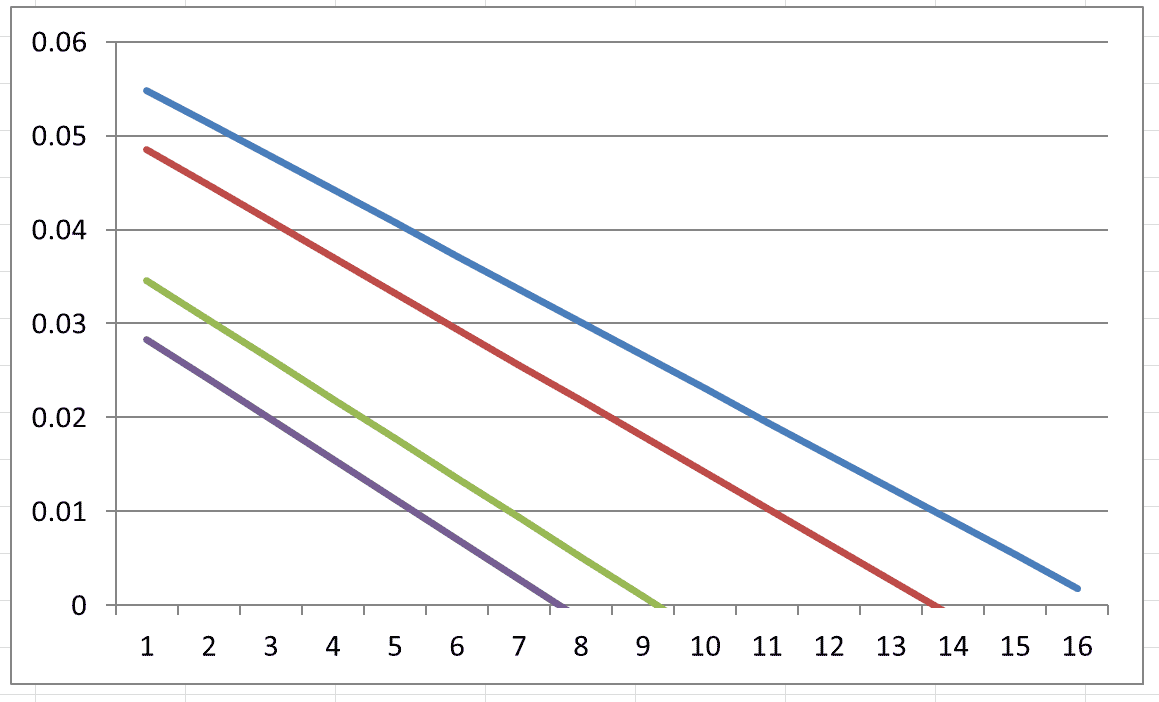
На графике по оси Y момент в условных величинах, на оси X обороты в тысячах.
Из чего мы видим что при равном напряжении двиглы одинаковой конструкции и размера, но с разным количеством витков (разным kV) относятся друг с другом совершенно однозначно - двигло с меньшим количетвом витков (Большим kV) полностью перекрывает по всем параметрам, включая момент на валу на всех оборотах, двигло с большим количеством витков (меньшим kV).
И такая петрушка практических на всех конкурентноспособных движках в нашем хобби. Примените формулы, это не так сложно.
ЗЫ Теперь я знаю почему сгорел мой 120а регуль на малых оборотах 8)
Но ток зависит от напряжения. Закон ома.
Нажимая на курок газа вы управляете именно напряжением. Неужели момент не зависит от курка газа?
…
Что же по вашему зависит от напряжения то? Дело в том что ток, который двигло может взять с регуля для обеспечения момента на валу, ограничен напряжением. За счет этого эффекта мы и регулируем курком момент/скорость.
Ток ДПТ НВ зависит от а) нагрузки на валу б) конструкции двигателя в) способности источника энергии его отдавать.
Вот смотрите. По второй формуле из моего поста построена электромеханическая характеристика двигателя. Это возможно потому что у нас ток пропорционален моменту, т.к. kФ постоянная
На графиках видно, что при разном питающем напряжении ток/момент будет один и тот же. Таким образом, ток от напряжения питания не зависит. От напряжения зависят обороты.
Формула закона Ома для вращающейся обмотки будет немного отличаться от привычной записи и включать в себя противоЭДС. И вырождается в привычный I=U/R только при оборотах равных 0.
Я это утверждал?
Нет, но пост адресован не только Вам. Хотя, Константин, тоже этого не утверждал - мне просто показалось это интересным.
Ваша формула верна алгебраически (вывели Вы ее верно), но совершенно бессмысленна физически. Обороты (вернее угловая скорость) - функция от момента и напряжения. А не наоборот. Момент, как я уже писал, равен M=k*Ф*I. И не зависит ни от оборотов, ни от напряжения.
Вот смотрите - приведу близкий пример: из закона Ома известно U=I*R => R=U/I. Т.о. можно сделать вывод, что сопротивление зависит от напряжения и тока, а на самом деле оно зависит только от свойств проводника - удельного сопротивления материала, площади поперечного сечения и длинны - R=pS/l.
Ну и соответсвенно все последующие рассуждения…
Примените формулы, это не так сложно.
No comment…
в) способности источника энергии его отдавать.
Вот регулятор хода и работает так, что по сути не дает ток, который просит двигло.
R=U/I. Т.о. можно сделать вывод, что сопротивление зависит от напряжения и тока, а на самом деле оно зависит только от свойств проводника - удельного сопротивления материала, площади поперечного сечения и длинны - R=pS/l.
Не важно что от чего зависит. Важно что и для чего мы рассчитываем. Я постоянно пользуюсь R=U/I когда мне нужно рассчитать нужный номинал сопротивления при известном напряжении и токе. Тоже самое я и сделал выше с моментом. Формулы на то и формулы, что при известных одних величинах можно рассчитать неизвестные.
У меня получился по сути график torque-speed curve, зависимость момента от скорости, который приводится для всех типов двигателей и который по вашему не имеет смысла.

От напряжения зависят обороты.
А от оборотов зависит момент.
Я смотрю тут люди подкованные подтянулись… Может решите задачку давно меня мучающую? Есть мнение, что провода от регуля до движка укорачивать нельзя - при обычном вращении проблем нет, они возникают при торможении. Вот интересно бы узнать на сколько увеличится ток торможения при укорочавании проводов скажем на 1см?
Я смотрю тут люди подкованные подтянулись… Может решите задачку давно меня мучающую? Есть мнение, что провода от регуля до движка укорачивать нельзя - при обычном вращении проблем нет, они возникают при торможении. Вот интересно бы узнать на сколько увеличится ток торможения при укорочавании проводов скажем на 1см?
Ну с этим проблемы. Теория то всегда запросто 😁 , а вот для применения на практике нужны данные, которых, как обычно, не хватает.
Надо подумать…