Новичковая тема или как поймать кайф…

Мотор так же обдувает стабилизатор. Взмывание по тангажу такое же, как при обычном безмоторном разгоне. То есть весьма не торопливое и легко отлавливается руками. Дополнительно компенсировать нет нужды, но можно микс на рв применить. Конечно это только при центровке близкой к нейтральной
но можно микс на рв применить
Для получения максимальной скороподъёмности (т.е. достижения максимальной высоты при ограниченном времени работы мотора ) планер должен лететь с углом атаки максимального качества. И балансировать его нужно не РВ, а выкосом, так как любые отклонения управляющих поверхностей качество ухудшают.
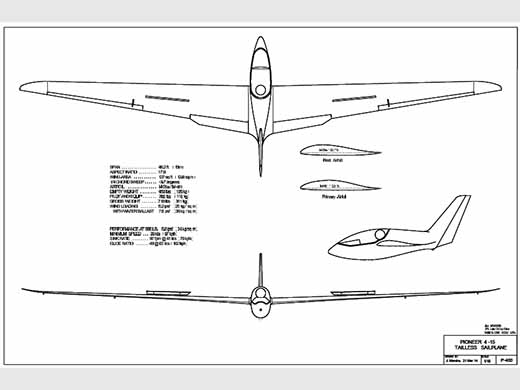
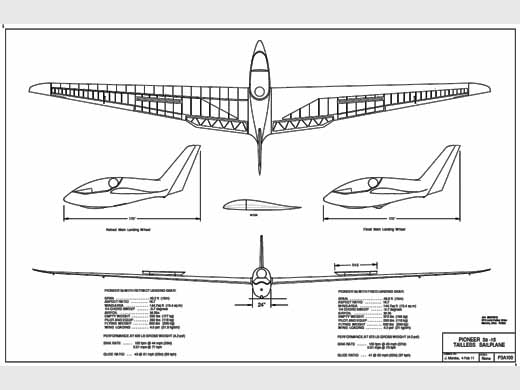
Тогда это упрощает задачу. Угол максимального качества профиля всегда известен, поставить мотор под таким углом к крылу и не замооачиваться. На спортивных планерах как раз “клюв” на пару градусов вниз смотрит.
При обсуждении выкосов в разных темах практически все не принимают во внимание один очень важный фактор - величину и положение относительно центра масс равнодействующей сил сопротивления Q. Так вот, если у Вас ось тяги проходит через центр масс, а эта самая Q выше или существенно выше центра масс, то появляется не хилый кабрирующий момент. Величина силы Q при установившемся движении равна тяге двигателя Т. В данном случае не будет динамического кабрирования или пикирования, которые появляются только в момент разгона, если ось тяги проходит выше или ниже центра масс. У меня была модель с двигателем на пилоне над крылом. Чтобы ось тяги проходила через центр масс, нужно было бы двигатель направить вертикально вверх. Но этого не требовалось.
И еще: максимальное качество достигается при оптимальной скорости планирования. Если взлетать с такой скоростью (5-7 м/с), то далеко не улетишь. Взлет, как правило, происходит при скорости заметно большей, чем оптимальная скорость планирования для наибольшего аэродинамического качества, и поэтому потребный коэффициент подъемной силы и аэродинамическое качество меньше, чем при планировании.
существенно выше центра масс
…что в планере случается редко. Кроме того вектора остальных действующих сил совсем не обязательно параллельны или перпендикулярны осям координат и приложены к центру масс.
Вот именно, силы располагаются по разному, а в установившемся взлетном режиме должны быть уравновешены. Центр масс на линии тяги удобен для симметричной пилотажки - не дергается по тангажу при перегазовке. Во всех остальных случаях - это всего лишь частный случай, и не надо заморачиваться обязательностью его исполнения.
Это необходимая настройка.
Вкурил:-) Ток Вы немного путаете причину и следствие. Если модель при увеличении скорости задирает нос, это не центровка передняя, это не достаточное отклонение РВ от себя. А сдвиг центровки назад, это вынужденная мера, чтоб обеспечить нормальный полет на малой скорости:-)
Не путайте пожалуйста причину и следствие. У Дрелы приведены траектории при разных центровках. Положение рв при этом то, которое получилось после триммирования на горизонтальный полет и никак иначе. Пока не изменится сама центровка, не изменится траектория пикирования. Руками помогать нельзя)
Если модель при увеличении скорости задирает нос, это не центровка передняя, это не достаточное отклонение РВ от себя.
Правильно! Компенсируем рост подъёмной силы отклонением РВ! Так победим! 😁
это вынужденная мера, чтоб обеспечить нормальный полет на малой скорости:-)
Теперь было б не плохо поделиться какой же планер настраиваешь 😉 😉
Теперь было б не плохо поделиться какой же планер настраиваешь
Как то так:-)
Как то так:-)
А мы тут…Выкос…Центровка…Триммирование…
А будет у него крутка на полградуса меньше чем нужно - и можете центровать, триммировать. До радуги в глазах. 😃
А будет у него крутка на полградуса меньше чем нужно
Не все так страшно на самом деле. С выкосом уже определился:-)
ЗЫ Кста этот дайв-тест как то самопроизвольно получился. Влупил вертикально метров на 160, а борт отказал (по моей вине), и так же вертикально в грунтовку:-)
На лк тоже все в силе, но дипазон очень уж узкий. Я ставлю переднюю, триммируюсь и по миллиметру шагаю назад, пока траектория не успокоится
А будет у него крутка на полградуса меньше чем нужно - и можете центровать, триммировать. До радуги в глазах.
Класс!
Как лучше аэродинамический тормоз организовать на летающем крыле?
Да уж, теория и практика никогда не подружатся 😃)
На счет тормоза, была тема про ЛК с закрылками. Режим бабочка так же возможен, но надо точно дозировать поверхности, чтобы момента по тангажу не было.
Как лучше
Правильнее будет сказать “как вообще организовать”. 😃
На прямых крыльях ставят традиционные тормоза.
На стреловидных - механизация задней кромки, расщепляемые винглеты.
Как коллега выше заметил, самое сложно - избежать моментов по тангажу.
Как лучше аэродинамический тормоз организовать на летающем крыле?
Пока хз:-) К концу след недели будет видно, надеюсь.
Да уж, теория и практика никогда не подружатся )
Да все норм, теория с практикой дружны. Просто не надо бояться менять место наблюдения. Чтоб не получалось как в известном анекдоте:-)
Попробовал на своём планере в инверте полетать. Летит, вполне адекватно. Только вот завести его в инветр без элеронов сложно. Чуть ошибся, перекосил и уже не выровнять, приходится выходить. В добавок для вывода нужен запас высоты. В общем можно если осторожно.
По результатам полётов уменьшил V крыла. Первоначально оно было достаточно заметное и соответственно имелась лишняя курсовая устойчивость. Рулить по курсу было тяжело. Сейчас свёл V к минимум (штыри крепления крыла сделал прямыми). Курс все равно держит хорошо, а управляемость улучшилась.
С маленьким V может получиться спиральная неустойчивость,невыводимость из спирали. Без элеронов это обречено на крэш. Будьте осторожны, не допускайте большой крен на виражах.
В инверт можно войти через полупетлю… и выйти так же. Без крена.