Аппаратура Devention (DEVO) FAQ

Владислав, насколько я понял, этот номер генерируется случайно и служит для быстрой привязке приемника/передатчика и генерируется каждый раз новый. Номер менять пробовал, но никакоко действия это не привносит, все повторяется как в дне сурка. Пробовал сбрасывать все настройки со всего, настраивал все заново, но коннект пропадает при сбросе питания с валкеры, как ни крути, временно помогает забиндить только проведенная манипуляция со сбросом приемника
Конечно сбрасывает ты же перемычку в приемник не вставляешь, поэтому фиксид не сохраняется😵
Конечно сбрасывает ты же перемычку в приемник не вставляешь, поэтому фиксид не сохраняется😵
А можно это подробнее описать, в несколько шагов. Мне этот фиксид тоже не очень понятен.
Я им хоть и не пользуюсь, но чтоб знать:)
А вам видео сверху не достаточно ?
Тогда все расписывать -это будет как об стенку горох.
А вам видео сверху не достаточно ?
Тогда все расписывать -это будет как об стенку горох.
Хамить-то не обязательно! Особенно, если Вы шибко умный
Ни в коем случае не хотел никого обидеть . Но тоже поймите.
Объяснять каждому второму одно и тоже уже надоело.
Вообщем смотрите первое видео сверху ,там все правильно показано.
Ни в коем случае не хотел никого обидеть . Но тоже поймите.
Объяснять каждому второму одно и тоже уже надоело.
Вообщем смотрите первое видео сверху ,там все правильно показано.
Надоело-не объясняйте. Не надо корчить из себя.
Посмотрю. Спасибо
Конечно сбрасывает ты же перемычку в приемник не вставляешь, поэтому фиксид не сохраняется😵
Все действия, показанные на моем видео были сделаны после сброса FixID как на приемнике, так и на передатчике.
Перемычки,как таковой, в моем приемнике rx-710 на валкере нет, есть кнопка clean, нажатие которой в определенном интервале времени соответствует замыканию контактов на представленном видео
прошу помощи, разобраться как работают программные миксы в devo7 в родной прошивке. Необходимо сделать на выходе руддера вот такую кривую
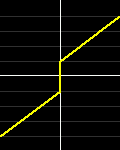
Есть такая программа для настройки аппаратуры (скрин ниже), как я понимаю выбираем главный канал руддер, slave - руддер, programm - как работает до конца не понятно. Если выставляем для нее normal то имеем три “точки”, left, right, offset. Как работают эти параметры не совсем понятно. Например выставляем left =0, right = 100% offset=15% то получим, что при движении стика руддера вправо на всем ходу получим прибавку (сдвиг) в 15%? если сделать аналогично еще один микс left=0, right=100, offset=15% то получим что то похожее на нужную кривую?
Здравствуйте, подскажите хороший приёмник от 4х-каналов для аппы devo7, чтоб была возможность подключиться к назе. Спасибо.
Тут возник интересный вопросик: как можно, и можно ли, получить на каком-нибудь канале 6 фиксированных значений? То есть, есть 3-х позиционник = 3 значения и как бы его смиксовать с 2-х позиционником, что бы получить ещё 3 значения, что бы в итоге на выходе канала было 6 значений.
Всем спасибо за помощь. Разобрался сам. Теперь имею 6-позиционный переключатель.
Разобрался сам.
Простите за наглость, а поделиться как Вы это сделали не желаете?
По нашей аппе ничего не нашел, но руководствовался вот этим:
www.youtube.com/watch?v=JBowTPvu1qc&nohtml5=False
В принципе у нас всё тоже самое. Посмотрите программ микс…
Доброго дня! Есть кто-нибудь в Питере, кто мог бы обучить пользоваться Devo7 и Runner 250 advance. Купил коптера, но не понимаю даже как очки подключить!
Это смотря в каком вы районе. Если на западе - можете подъехать вот сюда. При хорошей погоде там всегда народ есть - помогут!
Это смотря в каком вы районе. Если на западе - можете подъехать вот сюда. При хорошей погоде там всегда народ есть - помогут!
Спасибо, заеду на входных.
А где-нибудь на севере? Академическая?)))
Подскажите пожалуйста, как на devo f12e сделать что бы при потери сигнала коптер останавливался?
Подскажите пожалуйста, как на devo f12e сделать что бы при потери сигнала коптер останавливался?
скорее всего fail safe нужно настроить
Спасибо
что бы при потери сигнала коптер останавливался?
Только это должен делать полётный контроллер, а не Devo F12e…
На чём летаете?