Аппаратура Radiolink AT 9 2,4 ГГц

Зачем если не секрет)?
Есть же мотор эмердженси стоп, который можно забиндить, но это в ардупилоте и пиксах
Подскажите реально на АТ9 сделать на переключатель команду дизарма моторов?
Вы бы уточняли - для какого контроллера и какой прошивки.
В клинфлай-бетафлай-инав и их предках арминг можно просто вешать на отдельный канал, как большинство и делает.
Включил переключатель - пошла эмуляция сведения стиков вниз к центру…
Можно попробовать через режим управления расходами - попросту “зажать” каналы стиков крайними точками в соответствующих углах.
Зачем если не секрет)?
Вы бы уточняли - для какого контроллера и какой прошивки.
В клинфлай-бетафлай-инав и их предках арминг можно просто вешать на отдельный канал, как большинство и делает.
Есть же мотор эмердженси стоп, который можно забиндить, но это в ардупилоте и пиксах
Извиняюсь, что сразу не расшифровал.
На 210 раме стоит контроллер F3Reacing, у которого можно назначить на отдельный канал арм/дизарм моторов.
На нём же выработан рефлекс в случае опасности для окружающих вырубать моторы если что.
Сейчас парк дополнился 650 рамой с NAZA и там дизарм только сведением стиков к центру. Я уже один раз опрокинул коптер на бок, когда после касания земли свёл стики к центру.
То ли не слишком быстро свёл, то ли моторы не успели до конца остановится, вообщем он воспринял это как команду на переворот.
После этого был включен режим “Интеллигентного выключения моторов” после которого, по неопытности остановил моторы прямо в воздухе.
Там при расходах газа ниже 10% контроллер глушит моторы и в течение 3х секунд ждёт команды на повторный запуск.
Хорошо что навыки на гоночном отработаны - отделался жёстким ударом о землю и снова взлетел.
Всё это подвело к поиску альтернативы, так сказать. Но если возможности нет - буду учится аккуратней выключать моторы…
Можно попробовать через режим управления расходами - попросту “зажать” каналы стиков крайними точками в соответствующих углах.
Похоже то что надо! - Попробую вечером.
Вот кстати человек в теме НАЗА пишет:
Тут уже правильно писали, что летать над людьми - плохая идея. Но может случится такое, что летаем в стороне, а коптер понесет на людей (электроника пока не совершенна, сегодня (15,06,2015) беспилотный автомобиль от гугл совершил тринадцатую аварию, а они начали тестовую эксплуатацию всего 1 июня и уже 13 аварий!!! и это гугл!!!). Не знаю как у кого, но у меня на сторонний тумблер настроен газ 13% и используя ту самую “булеву алгебру” я могу либо включить эти 13%, либо мгновенно выключить. Я не пытаюсь Вас переоспорить. Это просто диалог. И интересно Ваше мнение.
Что он имеет в виду?
Возможно у него настроен “интеллигентный” режим дизарма на НАЗЕ и после арма он включает расходы, которые не дают опускаться газу ниже 13%, а когда он хочет дизармит движки - выключает тумблер и он загоняет газ в зону от 0 до 10% для выключения двигателей.
Всё верно?
Блин - похоже у меня путаница в голове с Немедленным и Интеллигентным режимом. Возможно напутал и у меня был включен немедленный режим.
Возможно у него настроен “интеллигентный” режим дизарма на НАЗЕ и после арма он включает расходы, которые не дают опускаться газу ниже 13%, а когда он хочет дизармит движки - выключает тумблер и он загоняет газ в зону от 0 до 10% для выключения двигателей.
Я с назой дела не имел и опираюсь лишь на ваше описание “интеллигентного” режима - но, судя по описанию, человек решал проблему аналогично тому, что предложил я, “зажатием” расходов. Только не через “зажатие стиков в угол”, а через “ограничение минимального газа” при арминге. Кстати, “дизарм” в этом случае точно так же можно сделать, “зажав” канал газа в интервале от 0 до 10%.
Спасибо, Алексей!
Видимо так у него и настроено. Если с настройками назы зайду в тупик - так и буду делать.
Сейчас вычитал, что наза в GPS + интеллигентная остановка моторов не должна останавливать двигатели в воздухе даже при расходах газа менее 10%.
На обеде посмотрю что у меня в настройках, почему то думал что стоит “интеллигент”, если так, то ничего не понимаю - коптер с высоты 2 метра начал падать на землю, когда я газ в низ опустил.
Эксперименты в воздухе что то не очень хочется проводить )))
У меня тоже была включена умная система пуска двигателей. В итоге при спуске ветром коптер кувырнуло и наза отрубила движки. Так было 2 раза пока я не понял и не отключил эту систему. После все ок. Даже если двигатели случайно вырубить опустив газ до нуля то после поднятия ручки коптер сразу стабилизируется не смотря на его положение.
В итоге при спуске ветром коптер кувырнуло и наза отрубила движки. Так было 2 раза пока я не понял и не отключил эту систему.
А снова двигатели включаются после кувырка или уже всё - камнем вниз?
Если интеллектуальная система включена то больше не включается) по крайней мере когда я падал с 1200 метров я пытался завести их но похер. Квадр крутился и не включал движки
Если интеллектуальная система включена то больше не включается) по крайней мере когда я падал с 1200 метров я пытался завести их но похер. Квадр крутился и не включал движки
Теперь понятно почему люди отключают её.
через “ограничение минимального газа” при арминге. Кстати, “дизарм” в этом случае точно так же можно сделать, “зажав” канал газа в интервале от 0 до 10%.
Не нашёл в аппаратуре как ограничить газ. В разделе D/R, EXP можно рулить только 1 2 4 каналами 😦
Всё, нашёл - THR-CURVE
Как правильно устанавливать антенну приемника(R9DS) на модели?
Вот исчерпывающее объяснение диаграммы направленности и влияние элементов конструкции: rc-aviation.ru/fpv/1557-ustanovka-antenn
Не влияет, коптер это самолёт или велосипед - диаграмма направленности зависит от формы антенны и окружающих токопроводящих элементов.
И где-то потерял ссылку… там хорошо описаны и показаны были варианты расположения антенн и то как это расположение влияет на приём/передачу.
При выключении аппы значение RSSI канала замирает. Должен же показывать минимум? Никак не могу прикрутить RSSI с приемника R9DS к APM и MinimOSD. Пробую подключить отдельный канал с приемника напрямую к пину MinimOSD, показывает какую-то фигню. Пробую повешать на 8 канал и в MinimOSD выбрать в качестве RSSI этот канал - всегда 100%. Кто-нибудь выводил RSSI на APM+ MinimOSD? Заранее спасибо за ответ!
Такая же беда с осд на назе… епался день потом плюнул и бросил. Всеравно она не верные данные показывает
Всеравно она не верные данные показывает
Почему не верные?
Потому что он показывает качество передачи с приемника на передатчик! Если вы не заметили то индикация сигнала на экране передатчика пропадает метров на 500 раньше чем заканчивается дальность действия передатчика
Если вы не заметили то индикация сигнала на экране передатчика пропадает метров на 500 раньше чем заканчивается дальность действия передатчика
Возможен и обратный эффект - отвал управления при ненулевом уровне RSSI на аппе, всё зависит от уровня шумов в районе аппы и в районе модели, то есть от соотношения сигнал/шум при приёме сигнала с аппы приёмником и при приёме сигнала с приёмника аппой. Но в общем и целом согласен - для управления критичен уровень на приёмнике, а он-то как раз и не меряется, измерение “обратки” даёт лишь оценочную информацию.
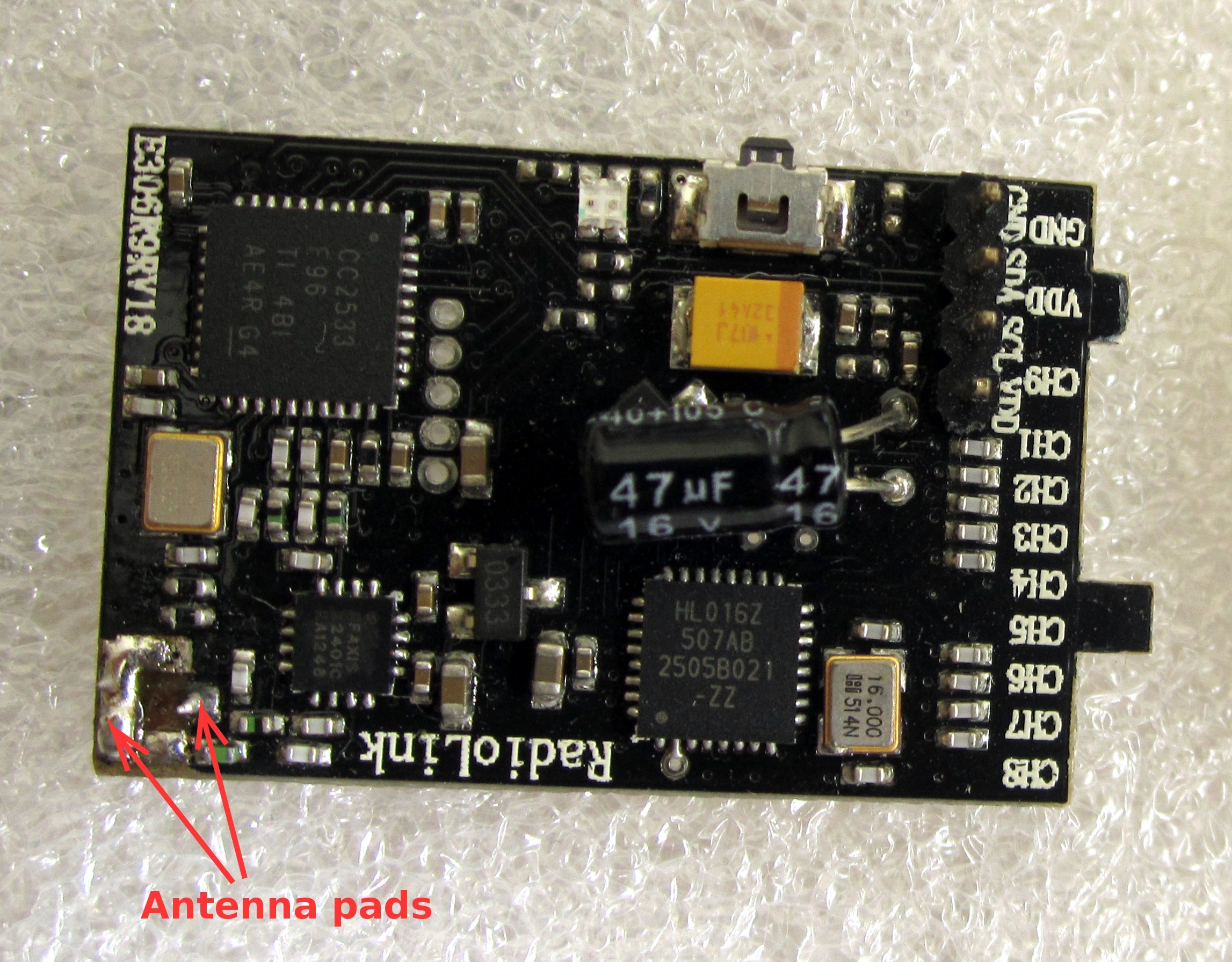
Отвалилась антенна от приёмника Radiolink RD9. Не нашел в инете даташита на плату, а сам провод с экранированием, наверное значит к минусу оплётку надо паять а саму жилу провода к плюсу. где они на плате точно не знаю, но явно оторавлось с уголка платы. Подскажите пожалуйста как её паять ?
Достаточно и без даташита посмотреть на плату, чтобы догадаться — центральная жила на площадку в середине, экран на «П-образный» полигон. Ну или воспользоваться Гуглом:
Подскажите, какие подобрать антенны для приемника R12DS? В китае есть только для R9DS, для R12DS немогу найти. Какие подойдут?
Подскажите, какие подобрать антенны для приемника R12DS? В китае есть только для R9DS, для R12DS немогу найти. Какие подойдут?
Яб не стал менять, они настроены на работу под 90гр установку.