FrSky S6R S8R

FrSky S6R, S8R - приемники с функцией стабилизации для самолетов. Только D16 режим! Т.е. нужен пульт Таранис 9 или 7.

Настройки по-русски (есть неточности)
Предлагаю обсудить эти приемники.
На мая 2017 приемник стоит 1800 (1650 с промокодом), что очень привлекательно. D и X серии стоят наравне, но без стабилизации.
Из тонкостей:
чтобы запустить режим тестирования (голубой светодиод), нужно быстро 3 раза подать 1500 или -1500 в Ch12. 3 импульса успеть подать за 3 секунды. Я долго бился и не понимал, почему я переключаю тумблер в +1500, а приемник не тестируется 😁
При настройке failsave не забывайте про 9, 10, 11, 12 каналы! Failsave настраивается с пульта, потому что кнопка на приемнике отдана под тестирование.
Приемник советуют прошить свежей прошивкой, которая лечит высокую чувствительность к вибрации. Сделать это можно с пульта, Frsky STK tool или Ардуиной.
Микс для 9 канала сделал с кривой 0-25-50-75-100 на S1. Теперь крутилка дает 1500…2000, то означает gyro gain 0…max.
Stab mode (только gyro) - компенсирует возмущения. Gyro Gain настраивается по Ch9 “крутилкой”-потенциометром.
Auto level mode - гироскоп и акселерометр выравнивают модель. Влияние крутилки Ch9 не заметил.
Failsave настроил так, чтобы активировался Auto level mode и был левый крен. Мотор отключается. Модель кружит, пока не сядет (в теории).
По инструкции после мигания голубого светодиода нужно подергать стики в крайние положения, кроме Газа. Приемник запомнит конечные точки.
Но на рцгрупс пишут, что движение стика Газа завершает самопроверку.
Все запутано. Синий диод перестал моргать, а самопроверка еще идет и требует двигать стики.
1. особенность Failsafe
Поскольку кнопка на приемнике запускает самотестирование, то Failsafe устанавливается с пульта. Что и было сделано: включается режим стабилизации и крен влево.
Опыт 1: условно летаем, выключаем пульт. Приемник прекрасно делает Failsafe.
Опыт 2: условно летаем, выключаем пульт. Выключаем-включаем питание на приемнике, имитируя просадку напряжения. Приемник не встает в Failsafe.
То есть, если питание в самолете барахлит, то приемник может не встать в Failsafe.
2. Конечные точки endpoints
Запускаем самотестирование. Синий отморгал. Двигаем стики AER на чуть-чуть. Приемник запоминает эти мизерные расходы. При включении стабилизации пытается выравняться этими малыми расходами. Начинаем двигать стики от края до края. Приемник запоминает новые endpoints и начинает гулять элевонами до упора.
Т.е. приемник постоянно обновляет endpoints, анализируя MAX отклонения стиков?
И еще, в инструкции написано, что после самотестирования приемник запоминает центры стиков. Хотя создается впечатление, что запоминает не центры, а endpoints.
Хотя создается впечатление, что запоминает не центры, а endpoints.
для оборудования это одно и тоже
для оборудования это одно и тоже
endpoints [988…2014]
центр 1497
Как одно и то же?
Имея endpoints считает центр
Имея endpoints считает центр
endpoints могут иметь сдвиг. Например, 924…1500…2000
Инструкция FRSKY написана весьма поверхностно в этом плане.
И в программе конфигурации Калибровка имеет бесконечный цикл, можно жать “Далее” сколько угодно раз.
Еще неясно, нужно ли делать самопроверку каждый раз перед полетом? По-идее, 1 раза хватит, чтобы приемник “горизонтальное ровное” запомнил положение модели и конечные точки с центрами.
Если endpoints гуляют “часто от температуры” то каждый раз
Вообще в инструкции по-моему говорится, что самотестирование надо выполнить перед первым полетом. Если ничего в модели не менялось, то повторять самотестирование перед каждым полетом не нужно.
И да, судя по тому, что говорит FrSky, приемник запоминает как центральные, так и конечные точки.
Опыт 2: условно летаем, выключаем пульт. Выключаем-включаем питание на приемнике, имитируя просадку напряжения. Приемник не встает в Failsafe.
То есть, если питание в самолете барахлит, то приемник может не встать в Failsafe.
А какой из существующих приемников (не обязательно со стабилизацией и вообще можно даже не FrSky) при подаче питания в отсутствии сигнала с аппаратуры сразу встает в FailSafe? Я к тому, что результат “Опыта 2”, по-идее, абсолютно закономерен и ожидаем.
- Конечные точки endpoints
Запускаем самотестирование. Синий отморгал. Двигаем стики AER на чуть-чуть. Приемник запоминает эти мизерные расходы. При включении стабилизации пытается выравняться этими малыми расходами. Начинаем двигать стики от края до края. Приемник запоминает новые endpoints и начинает гулять элевонами до упора.Т.е. приемник постоянно обновляет endpoints, анализируя MAX отклонения стиков?
И это, в принципе, логично. И, на мой взгляд, особых расхождений с инструкцией тут нет, т.к. лучше приемник сразу “обучить” правильному диапазону, чтобы стабилизация использовала весь доступный ход управляющих элементов - что, собственно, в инструкции и говорится.
А какой из существующих приемников (не обязательно со стабилизацией и вообще можно даже не FrSky) при подаче питания в отсутствии сигнала с аппаратуры сразу встает в FailSafe? Я к тому, что результат “Опыта 2”, по-идее, абсолютно закономерен и ожидаем.
Пока ни одного не встречал. Полетные контроллеры практически любые встают в ФС при подергивании питания И отсутствии сигнала.
Например, сервы перегрузили сеть, UBEC ушел в защиту. Питание на приемнике дернулось…
Полетные контроллеры практически любые встают в ФС при подергивании питания И отсутствии сигнала.
Это ж от настроек приемника и контроллера зависит. Например, Betaflight может вставать в FailSafe при определенном значении определенного канала (или нескольких каналов). Поэтому, в зависимости от того, что в рассматриваемом варианте выдает приемник, контроллер либо будет вставать в FailSafe, либо не будет.
Все же, возвращаясь к теме, это не плюс и не минус S6R / S8R. Это - общепринятая практика работы модельных приемников.
И да, судя по тому, что говорит FrSky, приемник запоминает как центральные, так и конечные точки.
Получается, если в полете триммировал, то нужно посадить самолет и пройти самотестирование, чтобы S6R запомнил новые триммированные “центры” и конечные точки.
Это же приемник со стабилизацией - тут “триммирование” осуществляется настройкой датчиков (углы, чувствительность), а не жмаканьем кнопок триммеров на аппе. Чувствительность можно частично скорректировать в полете (CH9), а для остального - да, потребуется посадка и настройка S6R.
Это же приемник со стабилизацией - тут “триммирование” осуществляется настройкой датчиков (углы, чувствительность), а не жмаканьем кнопок триммеров на аппе.
Получается так?
Хотя правильнее будет триммировать ЛК без стабилизации. Потом изменить длину тяг, а триммеры поставить в “0”.
А стабилизатор пусть работает “без сдвигов” на идеально настроенной модели.
Настройка ЛК
0. полностью собираем ЛК со всей начинкой. Ставим винт. Стабилизатор отключаем.
- выставляем центр тяжести ЦТ
- с выключенным мотором проверяем планирование ЛК. Триммируем до идеала. Меняем длину тяг, триммеры в ноль.
- получили идеально планирующую модель. Включаем мотор, смотрим на моторный полет, настраиваем выкос винта.
- получили идеально планирующую и летающую модель.
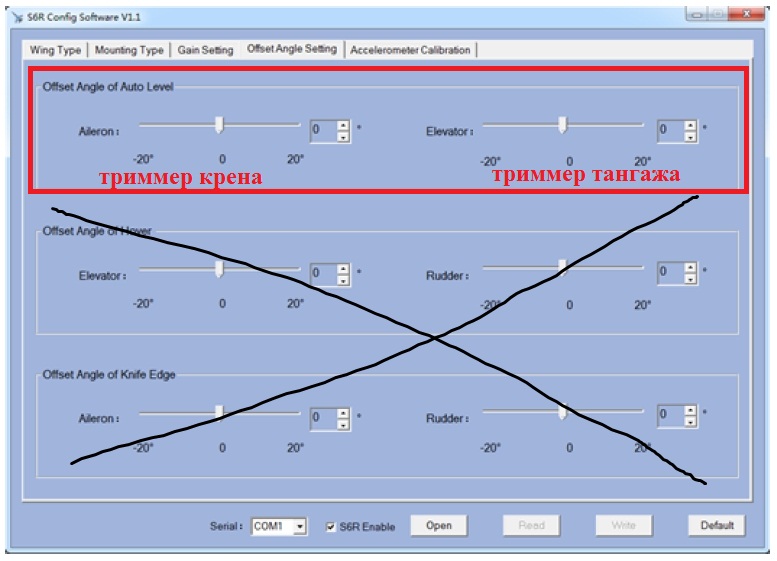
- включаем стабилизатор и мучаемся с ним, подбирая коэффициенты для Stab и Autolevel, меняя angle offset…
А зачем внизу зачеркнули? В каких режимах летаете, те и надо настраивать.
И да, если модель новая - то сначала имеет смысл отключить стабилизацию совсем, слетать “как есть”, настроить механику, а затем уже включить и настроить стабилизацию. Так, наверное, будет правильнее.