FrSky S6R S8R

По инструкции после мигания голубого светодиода нужно подергать стики в крайние положения, кроме Газа. Приемник запомнит конечные точки.
Но на рцгрупс пишут, что движение стика Газа завершает самопроверку.
Все запутано. Синий диод перестал моргать, а самопроверка еще идет и требует двигать стики.
1. особенность Failsafe
Поскольку кнопка на приемнике запускает самотестирование, то Failsafe устанавливается с пульта. Что и было сделано: включается режим стабилизации и крен влево.
Опыт 1: условно летаем, выключаем пульт. Приемник прекрасно делает Failsafe.
Опыт 2: условно летаем, выключаем пульт. Выключаем-включаем питание на приемнике, имитируя просадку напряжения. Приемник не встает в Failsafe.
То есть, если питание в самолете барахлит, то приемник может не встать в Failsafe.
2. Конечные точки endpoints
Запускаем самотестирование. Синий отморгал. Двигаем стики AER на чуть-чуть. Приемник запоминает эти мизерные расходы. При включении стабилизации пытается выравняться этими малыми расходами. Начинаем двигать стики от края до края. Приемник запоминает новые endpoints и начинает гулять элевонами до упора.
Т.е. приемник постоянно обновляет endpoints, анализируя MAX отклонения стиков?
И еще, в инструкции написано, что после самотестирования приемник запоминает центры стиков. Хотя создается впечатление, что запоминает не центры, а endpoints.
Хотя создается впечатление, что запоминает не центры, а endpoints.
для оборудования это одно и тоже
для оборудования это одно и тоже
endpoints [988…2014]
центр 1497
Как одно и то же?
Имея endpoints считает центр
Имея endpoints считает центр
endpoints могут иметь сдвиг. Например, 924…1500…2000
Инструкция FRSKY написана весьма поверхностно в этом плане.
И в программе конфигурации Калибровка имеет бесконечный цикл, можно жать “Далее” сколько угодно раз.
Еще неясно, нужно ли делать самопроверку каждый раз перед полетом? По-идее, 1 раза хватит, чтобы приемник “горизонтальное ровное” запомнил положение модели и конечные точки с центрами.
Если endpoints гуляют “часто от температуры” то каждый раз
Вообще в инструкции по-моему говорится, что самотестирование надо выполнить перед первым полетом. Если ничего в модели не менялось, то повторять самотестирование перед каждым полетом не нужно.
И да, судя по тому, что говорит FrSky, приемник запоминает как центральные, так и конечные точки.
Опыт 2: условно летаем, выключаем пульт. Выключаем-включаем питание на приемнике, имитируя просадку напряжения. Приемник не встает в Failsafe.
То есть, если питание в самолете барахлит, то приемник может не встать в Failsafe.
А какой из существующих приемников (не обязательно со стабилизацией и вообще можно даже не FrSky) при подаче питания в отсутствии сигнала с аппаратуры сразу встает в FailSafe? Я к тому, что результат “Опыта 2”, по-идее, абсолютно закономерен и ожидаем.
- Конечные точки endpoints
Запускаем самотестирование. Синий отморгал. Двигаем стики AER на чуть-чуть. Приемник запоминает эти мизерные расходы. При включении стабилизации пытается выравняться этими малыми расходами. Начинаем двигать стики от края до края. Приемник запоминает новые endpoints и начинает гулять элевонами до упора.Т.е. приемник постоянно обновляет endpoints, анализируя MAX отклонения стиков?
И это, в принципе, логично. И, на мой взгляд, особых расхождений с инструкцией тут нет, т.к. лучше приемник сразу “обучить” правильному диапазону, чтобы стабилизация использовала весь доступный ход управляющих элементов - что, собственно, в инструкции и говорится.
А какой из существующих приемников (не обязательно со стабилизацией и вообще можно даже не FrSky) при подаче питания в отсутствии сигнала с аппаратуры сразу встает в FailSafe? Я к тому, что результат “Опыта 2”, по-идее, абсолютно закономерен и ожидаем.
Пока ни одного не встречал. Полетные контроллеры практически любые встают в ФС при подергивании питания И отсутствии сигнала.
Например, сервы перегрузили сеть, UBEC ушел в защиту. Питание на приемнике дернулось…
Полетные контроллеры практически любые встают в ФС при подергивании питания И отсутствии сигнала.
Это ж от настроек приемника и контроллера зависит. Например, Betaflight может вставать в FailSafe при определенном значении определенного канала (или нескольких каналов). Поэтому, в зависимости от того, что в рассматриваемом варианте выдает приемник, контроллер либо будет вставать в FailSafe, либо не будет.
Все же, возвращаясь к теме, это не плюс и не минус S6R / S8R. Это - общепринятая практика работы модельных приемников.
И да, судя по тому, что говорит FrSky, приемник запоминает как центральные, так и конечные точки.
Получается, если в полете триммировал, то нужно посадить самолет и пройти самотестирование, чтобы S6R запомнил новые триммированные “центры” и конечные точки.
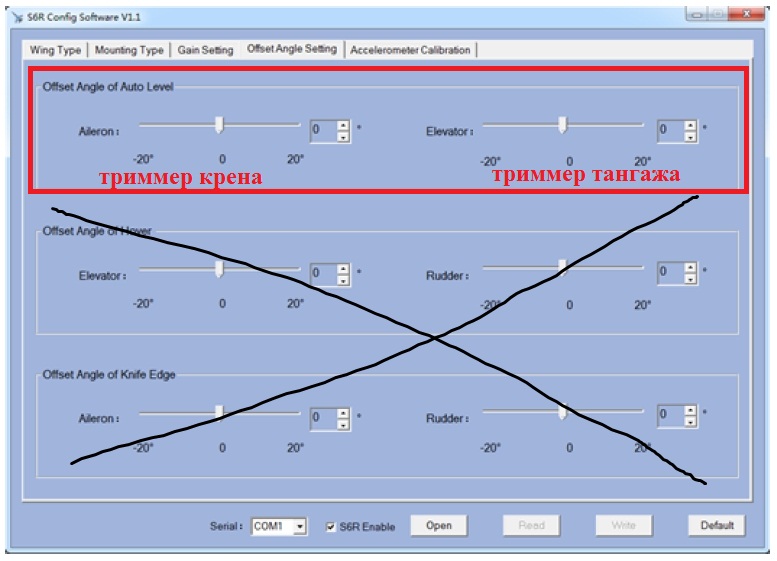
Это же приемник со стабилизацией - тут “триммирование” осуществляется настройкой датчиков (углы, чувствительность), а не жмаканьем кнопок триммеров на аппе. Чувствительность можно частично скорректировать в полете (CH9), а для остального - да, потребуется посадка и настройка S6R.
Это же приемник со стабилизацией - тут “триммирование” осуществляется настройкой датчиков (углы, чувствительность), а не жмаканьем кнопок триммеров на аппе.
Получается так?
Хотя правильнее будет триммировать ЛК без стабилизации. Потом изменить длину тяг, а триммеры поставить в “0”.
А стабилизатор пусть работает “без сдвигов” на идеально настроенной модели.
Настройка ЛК
0. полностью собираем ЛК со всей начинкой. Ставим винт. Стабилизатор отключаем.
- выставляем центр тяжести ЦТ
- с выключенным мотором проверяем планирование ЛК. Триммируем до идеала. Меняем длину тяг, триммеры в ноль.
- получили идеально планирующую модель. Включаем мотор, смотрим на моторный полет, настраиваем выкос винта.
- получили идеально планирующую и летающую модель.
- включаем стабилизатор и мучаемся с ним, подбирая коэффициенты для Stab и Autolevel, меняя angle offset…
А зачем внизу зачеркнули? В каких режимах летаете, те и надо настраивать.
И да, если модель новая - то сначала имеет смысл отключить стабилизацию совсем, слетать “как есть”, настроить механику, а затем уже включить и настроить стабилизацию. Так, наверное, будет правильнее.
А зачем внизу зачеркнули?
Летающее крыло…
А, ну да… логично. 😃
Борис, а в чем неточности русской расширенный инструкции на rcgear?
Там почти все разжевано, спасибо Андрею.
Борис, а в чем неточности русской расширенный инструкции на rcgear?
Было (в кеше Гугла еще осталось) “Процедуру тестирования S6R и подключенных исполнительных элементов можно запустить вручную, нажав кнопку F/S (BIND) на включенном приемнике, или с помощью аппаратуры управления, если изменить значение канала CH12 от нейтрального (0) до +100 или -100. При этом на S6R загорится синий светодиод”
Я менял-менял… Тумблеры разные пробовал. Ни-че-го! А потом узнал про 3 раза за 3 секунды 😁
Стало сейчас “если изменить значение канала CH12 от нейтрального (0) до +100 или -100 трижды в течение 3 секунд (таким образом реализована защита от случайного запуска самотестирования). При этом на S6R загорится синий”
Еще, насколько отложилось в памяти, что-то было с каналами. Сейчас не нашел. Возможно, глюк.
Еще по Ch9. Если сделать curve (прямую 0-25-50-75-100), то можно смиксовать Ch9 от 1500 до 2000 и поставить на крутилку. Тогда чувствительность будет от 0 до 100% при вращении крутилки.
А если как в статье, то чувствительность меняется 100%…0…100%
Было (в кеше Гугла еще осталось)
Обновится со временем, я думаю!
Вариант, который еще остался в кэше Гугла - это то, как приемники работали на ранних прошивках. Но время идет, прошивки меняются, в т.ч. добавилась функция защиты от случайного включения самотестирования в полете. То, что описано в инструкции сейчас - актуально для современных прошивок.
Еще по Ch9. Если сделать curve (прямую 0-25-50-75-100), то можно смиксовать Ch9 от 1500 до 2000 и поставить на крутилку. Тогда чувствительность будет от 0 до 100% при вращении крутилки. А если как в статье, то чувствительность меняется 100%…0…100%
Так в статье ведь так и написано:
Чувствительность задается формулой: gain = abs (CH9-M). Таким образом, минимальная чувствительность будет при значении CH9 = 0, а максимальная - при значении CH9 = 100 (или -100).
Или я куда-то не туда смотрю?
Возможно, стоит перефразировать эту часть…