Воюем с гувернёром V-Bar или помогите разобратсья :)

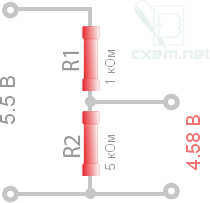
На первой картинке нарисовано то, что у вас написано:
(5кОм между минусом и сигнальным правильно?)
Во всяком случае так можно понять, потому как вполне можно подумать что “сигнальный провод” это выход с датчика оборотов. И нарисован действительно маразм. Но и такой маразм может получиться при невнимательности. Если у вас как на второй картинке, то норм.
Куда можно воткнуть сигнальный выход с датчика кроме как в RXA?
Ну… судя по второй картинке в резистор 1 кОм…
Во всяком случае так можно понять
Ну не знаю,извиняюсь если не так выразился 😃.Теперь еще один ньюанс.Если двиг остановлен то в логах глюки.При заведенном лог чистый.Наверное забить на это и летать?
Опа!Сейчас повнимательней глянул на фотки…похоже все таки у меня соединение как на первой.Просто надо перекинуть конец 5ти килоомника на другую сторону килоомника как на второй картинке.Вот спасибо еще раз!Невнимательность моя до добра не доведет 😃.Вечером переделаю и попробую.
Да не надо ничего переворачивать… Резистор 1 к должен быть припаян к выходу датчика после него 5 к на минус и уже из места соединения 1 к и 5 к идет на вход вибара. По другому не правильно однозначно, так собственно и написано на картинке красным 😃
По поводу глюков когда мотор не крутится да и глюков вообще: скорее всего с датчика идет постоянно какой то срач и тут мне видится два решения 1) взять другой датчик 2) припаять параллельно резистору 5 к керамический конденсатор емкостью 5 - 10 пф.
Сейчас повнимательней глянул на фотки…похоже все таки у меня соединение как на первой.Просто надо перекинуть конец 5ти килоомника на другую сторону килоомника как на второй картинке
Совершенно верно, если у вас как на первой картинке, нужно верхний (по схеме) вывод резистора 5 кОм “перекинуть” на левый (по схеме) вывод резистора 1 кОм. После обязательно провести замеры напряжения поступающего на вход RxA. Это можно измерять при не вращающемся двигателе тестером в режиме измерения постоянного напряжения (DC), так даже лучше я думаю. Потому что при вращающемся уже придётся измерять переменное напряжение (АС) с вытекающей возможной неточностью. Для чего это делать… Может так получиться, что при Вашем напряжении БЕКа (читай напряжении запитки датчика), Вашем делителе (1кОм/5кОм), амплитуда сигнала поступающего на вход RxA будет близка к минимальной 2,5В. При просадке БЕКа вход гувера (RxA) может оказаться без информации о оборотах, оно вам надо? Я считаю нужно подбирать делитель так, чтобы амплитуда сигнала поступающего на вход RxA была близка к максимальной (5В), тогда просадки БЕКа или другого питания борта не страшны.
P.S. Всё что вы делаете с вашим ФБЛ, на ваш страх и риск 😉
Это можно измерять при не вращающемся двигателе тестером в режиме измерения постоянного напряжения (DC), так даже лучше я думаю.
Ага.Понял.
Потому что при вращающемся уже придётся измерять переменное напряжение (АС) с вытекающей возможной неточностью.
Ну само собой.Для этого и нужен осцилл,которого у меня нет.
Вашем делителе (1кОм/5кОм), амплитуда сигнала поступающего на вход RxA будет близка к минимальной 2,5В.
Так вроде посчитали ребята, но померяю конечно же,только вечером.
P.S. Всё что вы делаете с вашим ФБЛ, на ваш страх и риск
Ха, вот это порадовало 😃
Вот калькулятор для расчета делителя cxem.net/calc/divider_calc.php
Фтопку этот калькулятор. Здесь он не прокатит! Один советчик уже советовал. Кому интересно почитайте.
Фтопку этот калькулятор. Здесь он не прокатит! Один советчик уже советовал. Кому интересно почитайте.
Приведите свою формулу расчета, пожалуйста.
Я приведу свою цитату:
Опытным путём подобрать делитель (особо вумные могут расчитать)
если получится конечно. хе-хе
Не всё так просто, есть ещё выходное сопротивление датчика, оно тоже влияет. Можно заниматься теорией, вспоминать законы Кирхгофа и т.д. и т.п… А можно экспериментально подобрать и всё будет сразу учтено. Что я и сделал. И забыл. Работает.
Я
Не всё так просто, есть ещё выходное сопротивление датчика, оно тоже влияет. Можно заниматься теорией, вспоминать законы Кирхгофа и т.д. и т.п…
Да уж… Можно также вспомнить Квантововолновые кареляции континиумов 😃 но думаю это всё же лишнее, достаточно вспомнить закон Ома. Уверяю вас, ОН работает - проверено практикой;)
Фтопку этот калькулятор. Здесь он не прокатит! Один советчик уже советовал. Кому интересно почитайте.
Я именно по этой формуле делал и у меня всё так и получилось с отклонениями в пределах погрешности. Делал себе и другу. Естественно методом тыка можно тоже подобрать, я не отрицаю это. Но можно же сделать по уму и быстрее.
Вот вы тут какие то ошибки в логах ищите, резисторы подбираете, а я сделал 1 раз и просто летаю.
Вот вы тут какие то ошибки в логах ищите, резисторы подбираете, а я сделал 1 раз и просто летаю.
Если честно, я вообще ни разу логи не смотрел. Даже с ходу не скажу где там кнопочка их смотреть. Смотрел только вибрации и обороты и то на полу при настройке. На блюпуп и тел. на андроиде жаба денег не выделяет.
Можно заниматься теорией, вспоминать законы Кирхгофа и т.д. и т.п…
А можно посмотреть на схему. Я же говорю, выход датчика - открытый коллектор, притянутый к плюсу питания. Поэтому нужен один резистор между сигналом и землёй. Второе плечо делителя уже есть в схеме, номинал известен, 4,7к.
О! Я кажется понял, почему плохо работает схема со стабилитроном. Слишком малый ток для удержания лавинного пробоя. Стабилитрон пробивается, но тока не хватает. Он закрывается, потом опять пробивается. Получается ВЧ помеха. Для 3.3В при питании 6В получается всего 0.6мА. Надо попробовать от “+” питания к катоду стабилитрона поставить резистор 510 Ом.
Перепаял резисторы по фен шую.Все работает как и раньше, тоесть без проблемм,логи вообще теперь чистые что в полете что на выключеном двиге.Померил напряжение на сигнальном проводе RXA на выкл. двиге,5.4в.Практически напряжение борта.Но когда (я мерил после отлета акка и регуль-мотор пищат о просадке бипами) мотор пищит,тоесть на него ведь подается напруга с регуля,на сигнальном напряжение падает до 4.8-4.4.Как то так.Кто что скажет?
Перепаял резисторы по фен шую.
По фен шую - это как?
По фен шую - это как?
Немного выше на этой странице есть обсуждение как я ошибся с соединением резисторов.Переделал как по схеме справа.
Переделал как по схеме справа.
1k можно не ставить.
Слишком малый ток для удержания лавинного пробоя.
Век живи - век учись, посмотрел данные по нашим стабилитронам на 3.9 и 4.7 В. У всех мин. ток стабилизации 3 мА, редко 1 мА. С другой стороны, подтягивающий резистор для LM393 на всех схемах ещё больше, 10к, так что, наверное, со стабилитроном совсем не получится.
Убрал килоомник.На сигнальном при неработающем моторе опять 5.4в.Гувер работает как и раньше но теперь под конец полета на севшем акке лог засирается глюками.
Вот, блин, чудеса…
Да уж.Летать не буду пока не выяснится этот вопрос.Не хочу спалить вход гувера.Хотя есть еще выход сателита 3.3в:)