Arduino для BAIT BOAT...

Roboat2011
Roboat2012
что-то не могу на них зайти…не пускает браузер
что-то не могу на них зайти…не пускает браузер
у меня тоже ругался. Что мол сайт якобы малонадежный и все такое. я проигнорил, ибо сайту тому года три как минимум.
у меня тоже ругался. Что мол сайт якобы малонадежный и все такое. я проигнорил, ибо сайту тому года три как минимум.
так и не получилось зайти… АВАСТ категорически все от этого сайта блокирует для любого браузера… там что,есть реальные советы как все сделать на практике или только все поверхностно ?
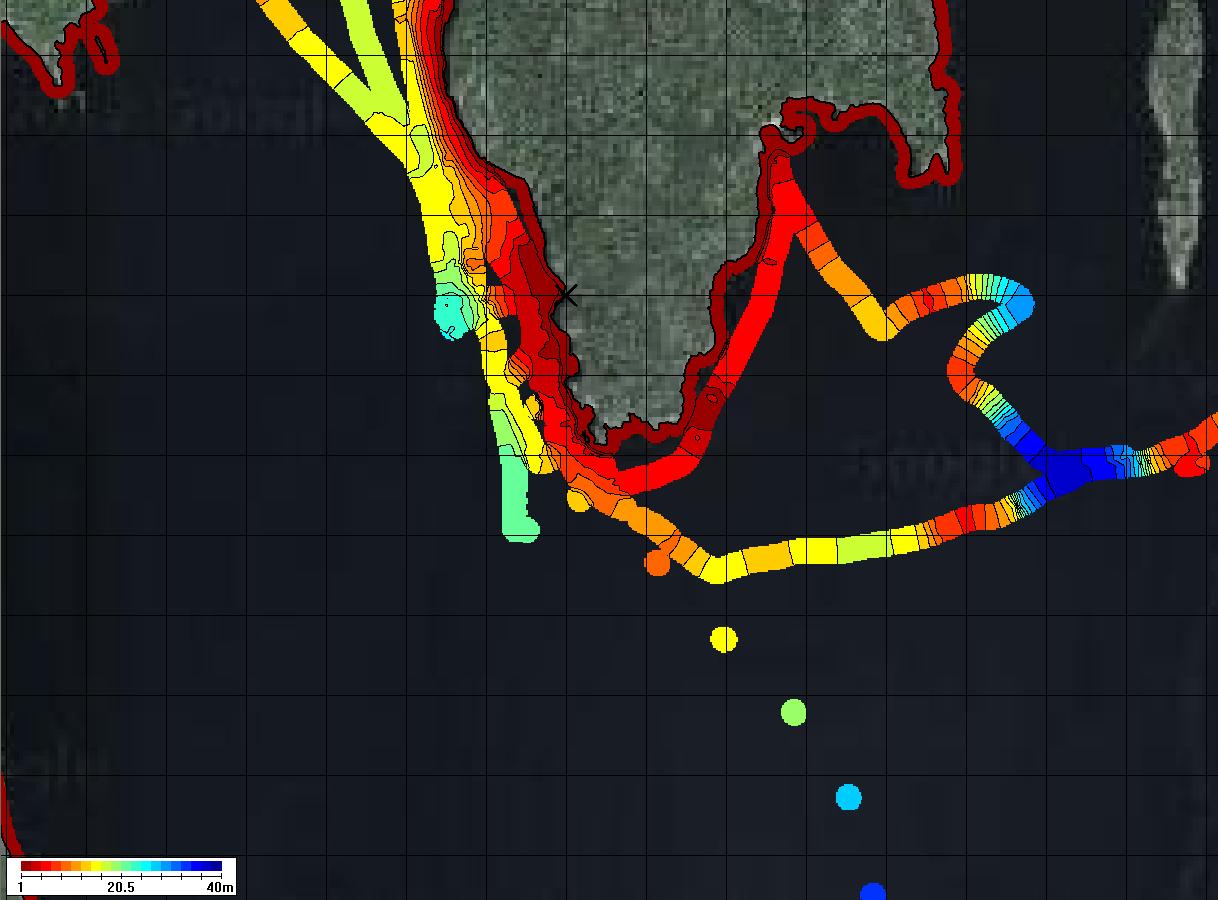
Там живой пример корабля-робота со схемами и основными решениями, на базе Ардуино, включая скетч. Умеющего прощупывать дно с целью создания карты рельефа.
Аваст при желании можно отключить, не известно какой была причина попадания сервера в список не надежных.
Еще одно описание той же(первой) конструкции на сайте второго из разработчиков.
Еще одно описание
спасибо ! освежил в памяти немного то что уже давно видел… только вот все-равно куча вопросов…практического характера…
все-равно куча вопросов…практического характера…
там есть мыло разработчика. )) Или еще что то хотелось?
Или еще что то хотелось?
та на практике все это нереально реализовать…по крайней мере с моими познаниями…без конкретного гида никак…
та на практике все это нереально реализовать…по крайней мере с моими познаниями…
Глаза боятся, а … Привлечь кого то из знатоков паяльника для консультаций нет возможности? Хотя тема с Ардуино в качестве головы тем и хороша что в освоении очень проста. Буквально на столько, что в 9-12 лет отдельные роботостроители уже участвуют в разных конкурсах со своей электроникой…
Еще раз повторюсь,мне не хочется прикручивать крылья к катеру
Судя по Вашим сообщениям в самолетной ветке:
Но если мне не нужны лишние датчики,я рассматриваю rover,
Так и думал…Спасибо…Буду пробовать переписывать
, Вы считаете IMU лишним для ползающих/плавающих устройств?
Конечно можно обойтись и без них, но это как раз будет “каменный век”.
АРМ хорош именно тем, что в нем решены проблемы обработки информации с инерциальных датчиков, комплексирования ее с информацией GPS/магнетометра и на них можно не тратить время.
такое впечатление , что сканирование глубин никем так и не реализовано до сих пор…
Олег, Probelzaelo, уже напомнил о реализованных проектах.
Тут вопрос больше не в технической стороне.
Лепить что-то на эхолотах-поплавках нет ни смысла, ни желания.
А заморачиваться добычей эхолотов, как в указанных проектах, ради удовлетворения любопытства нет времени.
Самый простой вариант использовать АРМ только как АП, а все остальное с помощью дополнительного контроллера, как надстройки над АП. Это позволит, заодно, и легче решать проблемы обновления ПО в самом АП.
Привлечь кого то из знатоков паяльника для консультаций нет возможности?
та с паяльником дружу и сам ) но вот это програмирование …ну никак…
Я исхожу из того,что должно быть просто…дешево и практично.А запихивать кучу хлама для простого проекта не вижу смысла.Вы же не будете к светодиоду привязывать кучу датчиков,чтобы посмотреть как он мигает…)))
Может вам еще несколько моих проектов подкинуть,посидите там по шпионите,пока идет обсуждение и решение?..)))
такое впечатление , что сканирование глубин никем так и не реализовано до сих пор…
Есть уже давно проект,и он уже реализован…
Лепить что-то на эхолотах-поплавках нет ни смысла, ни желания. А заморачиваться добычей эхолотов, как в указанных проектах, ради удовлетворения любопытства нет времени.
Смысл от поплавков не очень, это точно. А добывать тот же эхолот хотя и проблемы нет, но только он стоит как два китайских одновременно, а информации с него получишь не на столько много как того хотелось бы.
Смысл от поплавков не очень, это точно.
Я бы сказал тут идут два направления,простые рыбаки, которым интересно не только знать глубины,но и где и в каком уровне воды стоит рыба(прошлый сезон это помогло,рыба стоял в пол воды,огромным таким планктоном),другим ,кто имеет катера и яхты и увлекается троллинговой рыбалкой интересно знать глубины,из показания датчика собрать всю информацию и сделать карту для своего прибора 2D и 3D.Есть сайт таких разработчиков.
Осталось только определится кому что надо…)))
Я так определился,поставлю два,один для простой рыбалки,второй для изготовления карт,после привязки исторических карт становится интересным и это направление.
Я бы сказал тут идут два направления,простые рыбаки, которым интересно не только знать глубины,но и где и в каком уровне воды стоит рыба(прошлый сезон это помогло,рыба стоял в пол воды,огромным таким планктоном),другим ,кто имеет катера и яхты и увлекается троллинговой рыбалкой интересно знать глубины,из показания датчика собрать всю информацию и сделать карту для своего прибора 2D и 3D.Есть сайт таких.
Осталось только определится кому что надо…)))
Я так определился,поставлю два,один для простой рыбалки,второй для изготовления карт,после привязки исторических карт становится интересным т и это направление.
Интересно, что рыба стояла в пол воды. Это наверное не карп был. У нас карп по дну ползает и в пол воды не ловится так же как и на поплавок, а вот толстолобик наоборот. Будете смеяться, но толстолобик у нас хорошо на свежий огурец идёт.
Будете смеяться, но толстолобик у нас хорошо на свежий огурец идёт.
Что смешного, его как раз на огурец много где ловят.
Я бы сказал тут идут два направления,простые рыбаки, которым интересно не только знать глубины,но и где и в каком уровне воды стоит рыба(прошлый сезон это помогло,рыба стоял в пол воды,огромным таким планктоном),другим ,кто имеет катера и яхты и увлекается троллинговой рыбалкой интересно знать глубины,из показания датчика собрать всю информацию и сделать карту для своего прибора 2D и 3D.Есть сайт таких разработчиков.
Для троллинга мало кто стал бы строить кораблик хотя есть и такие интузиасты )
А у каждого рыбака собственное мнение о том где и как рыбачить. кто то 50 лет на одном и том же месте рыбачит успешно и каждую каряжку там знает, ему можно не обьяснять потому что что эхолот, что кораблик не понятно для чего будут.
А кто то наоборот любит почти каждую рыбалку на новом водоеме. Тут мнения разделятся, один спорЦмен и сторонник удачи, а другой захочет заранее понять куда попал. одному лишь бы червячков искупать, а другому хочется этого червячка скормить кому то.
Есть сайт таких разработчиков.
а ссылочку ?
Интересно, что рыба стояла в пол воды. Это наверное не карп был.
Как раз таки карп,мотыль со дна поднимается на поверхность и после становится (комариком…))),вот карп и стоит в пол воды и всасывает тем самым питаясь.Самое тяжелое время для ловли,тяжело его отвлечь от этого пиршества…
Для троллинга мало кто стал бы строить кораблик хотя есть и такие интузиасты )
А они не строят кораблики,они как раз делают те самые приборы для сканирования глубин.Вот ссылка,думаю будет интересно:
devicter.blogspot.ru/2012/03/gps.html
а ссылочку ?
Вот…выше…)))
А добывать тот же эхолот хотя и проблемы нет, но только он стоит как два китайских одновременно, а информации с него получишь не на столько много как того хотелось бы.
Вот кстати не плохой вариант и информацией полон:
nav-nav.ru/shop/…/datchik-st40-depth-thru-hull/
Как вариант можно присмотреть черно белый монитор и прикрутить к АПе…
Вот ссылка,думаю будет интересно:
очень интересно!
Может я зря в этой теме спрашиваю…?
Наверное стоило поискать более подходящий раздел. 😃