Arduino для BAIT BOAT...

какую прошивку ставил?
Кажись 2.79. Короче самую последнюю из стабильных.
А-50 видно подумал в сторону своей распущенности
Свои домыслы оставьте при себе. Лучше научитесь грамотно писать. Хотя бы на одном языке.
Я установил это на свой кораблик (мотор движения - канал 3, серва поворотов - канал 1).
Все правильно.
Компас откалиброван,
Калибровку выполняли, надеюсь, вдали от источников магнитного поля и крупных железяк?
После калибровки проверяли соответствие магнитного курса направлению носа кораблика?
Надо проверить с выкл. и вкл.(нагруженным) мотором.
Если есть влияние моторов/проводов/элементов конструкции на компас, желательно вынести его от них подальше на немагнитной стойке. Для примера посмотрите как это делают на коптерах.
Если я правильно прочитал коментарии в коде…
Для начала лучше не лезть в код, а разобраться с настройками и выполнить самые необходимые.
Ну и условия эксперимента расписать подробнее.
Хулл - корпус.
Что он хотел написать про корпус я понял.
Только:
- почему его не назвать сразу корпусом?
- откуда там буква “у” в этом подобии транскрипции?
В код я пока не лезу, а только изучаю его. А вот в настройках как раз и указано что CH1-ROLL, CH2-PITCH, CH3-THROTTLE, CH4-YAW.
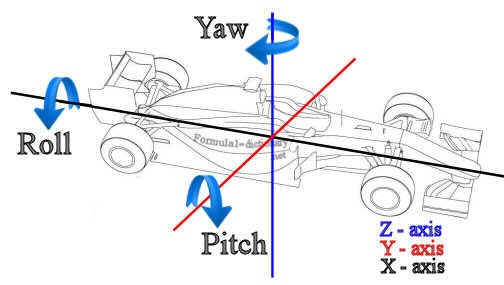
Нам нужно упрвление только вокруг оси Z, а если серва руля на первом канале то это ROLL.
Плохо откалиброванный компас это не причина ухода корабля с курса совсем. Он может плыть зигзагами или по большему радиусу но всеравно на нужную точку, а у меня корабль уходит черти куда. Хотя я по телеметрии вижу все точки и они правильные.
Кажись 2.79. Короче самую последнюю из стабильных.
Вам надо прошивка Ардуровер. Крайняя 2.49
Мои вопросы адресованы людям установившим APM 2,5-2,6. В мануалах описано одно, на практике другое. Каждый раз разбирать кораблик, чтобы переключить фишку, довольно хлопотное занятие. Вот и прошу помощи у практиков. Нехотите за спасибо - озвучте цену.
Мои вопросы адресованы людям установившим APM 2,5-2,6. В мануалах описано одно, на практике другое. Каждый раз разбирать кораблик, чтобы переключить фишку, довольно хлопотное занятие. Вот и прошу помощи у практиков. Нехотите за спасибо - озвучте цену.
Боюсь таких людей которые используют PM 2,5-2,6 единицы в ветке “Судомодели”. Я думаю что вы найдете ответы или вам помогут больше в ветке “Авиамодели” квадрокоптеры… Я заказал Arduino и буду писать под нее софт
А что нужно?Сам бодаю подобную задачу под 2 мотора.Вам прямой путь сюда rover.ardupilot.com/wiki/apmrover-setup/ и глубже на форум их.
Подключение не отличается.
В мануалах описано одно, на практике другое
Вот ссылка с картинками rover.ardupilot.com/wiki/apmrover-setup/
Вот именно. Мануалы для ровера сделаны с мануалов планера. Самолет поворачивает наклоняясь относительно горизонта (оборот вокруг фюзельжа), а наш горизонт всегда ровно. Поворачивать надо вокруг вертикальной оси, а это канал 4
Здравствуйте. Меня интересует работа АPM 2.6 + GPS. Я установил это на свой кораблик (мотор движения - канал 3, серва поворотов - канал 1). Компас откалиброван, спутники видит, точки прописывает. При попытке режима Авто или RTL, кораблик просто наматывает круги диаметром метров 4-5 и отходит от точки дом. Если я правильно прочитал коментарии в коде, то руль (YAV) надо ставить на канал 4. Проверить пока немогу. Подскажите кто вкурсе. Спасибо.
Вы GPS модуль перевели через У-центр на скорость 38400 и частоту 5 …???
Это надо только для предъидущей версии АПМ. Той что на 328 меге. АПМ 2,5 сам выставляет скорость обмена. Точки жпс выставляет правильно.
Это надо только для предъидущей версии АПМ. Той что на 328 меге. АПМ 2,5 сам выставляет скорость обмена. Точки жпс выставляет правильно.
АПМ да,но не GPS…
Мои вопросы адресованы людям установившим APM 2,5-2,6.
Так Вам и ответили люди, которые имеют опыт общения с ним.
Но, чтобы они смогли Вам что то посоветовать, им нужна информация.
Поэтому они задают встречные вопросы.
Мануалы для ровера сделаны с мануалов планера.
Только отчасти. Какой смысл переписывать те части, которые общие для всех вариантов. Проект открытый, никто никому ничего не обязан.
если серва руля на первом канале то это ROLL.
С чего бы? Это все условно.
На всем ездящем и плавающем первый канал как раз и есть управление рысканием/курсом(Yaw).
А уж на какой канал АП вывели разработчики - это их дело.
Главное, чтобы это было указано в руководстве.
Плохо откалиброванный компас это не причина ухода корабля с курса совсем.
Вы можете иметь свое мнение и настаивать на нем, но зачем тогда задаете вопросы?
Основой АРМ является инерциальная система, компас - только одно из средств ее коррекции. Если он работает неправильно, то может нарушится алгоритм работы АП.
А уж если влияние магнитных полей Вашего кораблика на него больше магнитного поля Земли, считайте его вообще нет.
iwan_s не поленитесь прочитайте по настройкам
www.fasprim.ru/forum/index.php?act=attach&type=pos…
Тут кто-то интересовался увеличением дальности приёма от Deeper, который работает на Bluetooth. Возникла такая идея - ставим возле шарика и телефона-планшета модули Bluetooth-USB, а к USB подключаем радио-модемы на 433-915 Мгц соответствующей мощности. По идее должно всё работать и без всякой переделки, как Deeper, так и телефона-планшета. Буду пробовать. Заказал модули Bluetooth-USB. Радио-модемы на 0,5W и 433Мгц есть, к ним, на всякий случай, есть модули USB, хотя и думаю, что можно будет подключить на прямую Tx-Rx и Rx-Tx. Эти выходы в модемах есть. Думаю, что тоже самое можно проделать и с WiFi для других типов эхолотов, но только модемы должны быть не на частоту 2,4G. Никаких принципиальных проблем я пока не вижу.
Радио-модемы мощностью 100mW дадут связь на 300 метров, а 0,5W до 3 км.
Тут кто-то интересовался увеличением дальности приёма от Deeper, который работает на Bluetooth. Возникла такая идея - ставим возле шарика и телефона-планшета модули Bluetooth-USB, а к USB подключаем радио-модемы на 433-915 Мгц соответствующей мощности. По идее должно всё работать и без всякой переделки, как Deeper, так и телефона-планшета. Буду пробовать. Заказал модули Bluetooth-USB. Радио-модемы на 0,5W и 433Мгц есть, к ним, на всякий случай, есть модули USB, хотя и думаю, что можно будет подключить на прямую Tx-Rx и Rx-Tx. Эти выходы в модемах есть. Думаю, что тоже самое можно проделать и с WiFi для других типов эхолотов, но только модемы должны быть не на частоту 2,4G. Никаких принципиальных проблем я пока не вижу.
Радио-модемы мощностью 100mW дадут связь на 300 метров, а 0,5W до 3 км.
Не проще на блютуз поставить бустер 2W на 2.4,они в продаже есть.
Не проще на блютуз поставить бустер 2W на 2.4,они в продаже есть.
Был такой вариант… но вот что станет с приёмниками при соседстве с таким передатчиком на той же частоте? И WiFi и Bluetooth накроются медным тазом…
Тут кто-то интересовался увеличением дальности приёма от Deeper, который работает на Bluetooth. Возникла такая идея - ставим возле шарика и телефона-планшета модули Bluetooth-USB, а к USB подключаем радио-модемы на 433-915 Мгц соответствующей мощности. По идее должно всё работать и без всякой переделки, как Deeper, так и телефона-планшета. Буду пробовать. Заказал модули Bluetooth-USB. Радио-модемы на 0,5W и 433Мгц есть, к ним, на всякий случай, есть модули USB, хотя и думаю, что можно будет подключить на прямую Tx-Rx и Rx-Tx. Эти выходы в модемах есть. Думаю, что тоже самое можно проделать и с WiFi для других типов эхолотов, но только модемы должны быть не на частоту 2,4G. Никаких принципиальных проблем я пока не вижу.
Радио-модемы мощностью 100mW дадут связь на 300 метров, а 0,5W до 3 км.
Вам все равно надо будет ковырять поплавок. Прога опрашивает сначала на предмет свой-чужой. Потом поплавок начинает передавать данные. Вам надо поставить модемы в разрыв поплавок - блютуз поплавка. Модемы перестроить в режим РАВ ДАТА. Скорость передачи надо измерить ком-ттл адаптером. Если будет выше 54700 дальше можете не париться. Телеметрия дико глючит на высших скоростях.
Вам все равно надо будет ковырять поплавок. Прога опрашивает сначала на предмет свой-чужой. Потом поплавок начинает передавать данные. Вам надо поставить модемы в разрыв поплавок - блютуз поплавка. Модемы перестроить в режим РАВ ДАТА. Скорость передачи надо измерить ком-ттл адаптером. Если будет выше 54700 дальше можете не париться. Телеметрия дико глючит на высших скоростях.
Зачем ковырять поплавок? Модуль Bluetooth-USB перехватывает сигнал и выступает в роли второго в паре. Потом результат этого обмена передаёт на радио-модем по USB. С другой стороны точно так же работает второй модуль при связи с телефоном или планшетом. Получается немного громоздко, но без всяких переделок. Для увеличения скорости обмена и взял мощные передатчики. Для моей задачи нужна дистанция максимум 500 метров, а реально хватит и 300 метров. Я проверил в городе эти модемы. Заходил в радиотень на расстоянии 1-1,2 км. Работают как звери. Пока схема обмена выглядит так: Сонар-ВТ <–> BT-USB<->(USB<->)Модем 0,5W<----->Модем 0,5W(<->USB )<->USB-BT <–> ВТ-Планшет/телефон. ВТ модули заказал HC-05 мастер-слейв. Запускать придётся по хитрому, но это не так уж и обременительно. Разумеется, что можно сделать более элегантно, но я не хочу нарушать целостность конструкций, да и повторяемость для чайников сохраняется - покупают готовые модули и без всякого шаманства. Есть вероятность, что в сонаре Deeper обработанная инфо выводится на встроенный USB. Тогда схема упрощается со стороны сонара - буду передавать прямо на радио-модем, а его родной ВТ просто отключу.
Если серийник зашит в блютузе поплавка - мой вариант. Если в процессоре поплавка - ваш вариант.