Arduino для BAIT BOAT...

Схему суда загрузить неполучается она в диптрейс сделана
Пробовал подключить телеметрию… неработает… блютус не работает… А В ПРОШИВКЕ АНДРУРОВЕР – работает порт телеметрии?
Usb при этом был подключен?
А В ПРОШИВКЕ АНДРУРОВЕР – работает порт телеметрии?
Телеметрию можно использовать совершенно независимо от оо стальной прошивки. Если необходимо использовать вместе значит нужно включить порт и настроить нужные функции, если они в прошивке не предусмотрены придется писать свои.
Телеметрию можно использовать совершенно независимо от оо стальной прошивки. Если необходимо использовать вместе значит нужно включить порт и настроить нужные функции, если они в прошивке не предусмотрены придется писать свои.
К сожалению я не столь опытный… USB отключал… сами модемы коннектятся.(в программе 3DRadio - по их настройке, при замыкании RX TX – эхо идёт.). При подключении к МП соединения нету.
В настройках модема и мп какие скоростях стоят? Светик на air модуле мигает?
При подключении к МП соединения нету.
надо в МП установить такую же скорость передачи и проверку четности как и в настройках у канала телеметрии. “в программе 3DRadio - по их настройке” скорее всего эти настройки видно. Скорее всего из-за разницы скоростей связь отсутствует
На картинке USB подключен ( работать не будет ) питание с батарей .
Если светик мигает тускло значит кто то садит tx
На картинке USB подключен ( работать не будет ) питание с батарей .
Если светик мигает тускло значит кто то садит tx
–USB от ноутбука отключен.в. Если светик мигает тускло значит кто то садит --tx – а кто.?
ОСВД – тоже не работает, нету выхода с АРМ…
–USB от ноутбука отключен.в. Если светик мигает тускло значит кто то садит --tx – а кто.?
RX APM -> TX MODEM и TX APM -> RX MODEM точно в этом порядке подключены?
RX APM -> TX MODEM и TX APM -> RX MODEM точно в этом порядке подключены?
Конечно… проверял несколько раз. Есть ещё квадрик СХ-20… - Я на него тоже установил телеметрию – работает. Вот сижу и думаю – если смысл разбирать квадрик, вытаскивать с него модем – для проверки… Кстати на квадрике я припаивал провода к мозгу, не использовал штекер…
На ремоте поставить скорость 38400, либо в миссионеров планёре поменять на 57 и должно наступить счастье 😃
А что такое освд?
А что такое освд?
apmcopter.ru/…/minimosd-proshivka-nastroyka-podkly… – там же… нету толку… не танцы с бубном ПО замена модемов… осталось смерится… брак АРМ-2.7?
РАЗОБРАЛ, посмотрел… АРМ как АРМ.
Апм у тебя живой
Светик же мигает в пол накала
Нада осцилографом посмотреть,если нету то звуковая карта с компа тоже сойдёт, погугли.
Я думаю OSD отключить нада
Я сделал так, паралельно телеметрии прицепил ардино нано и уже она расшифровывает протокол мавлик, и с нее взял выходы на светики и сервы для открытия люков и сброса снастей
А что мешало использовать возможности уже заложенные в АРМ?
Там же можно каналы, не используемые непосредственно для управления Ровером (т.е. кроме 1,3), задействовать для управления своими устройствами.
, и она же следит за акб и преключает на резервный акб когда нада.
А почему сразу оба в параллель не включить?
Меньше на них нагрузка по току будет.
И опять же есть встроенные функции контроля как по напряжению АКБ, так и по расходу энергии.
Там же можно каналы, не используемые непосредственно для управления Ровером (т.е. кроме 1,3), задействовать для управления своими устройствами.
- а можно по конкретней. как управлять без телеметрии для завоза в точку в авто режиме .(
 аппа 6 канальная… ( Flysky FS-CT6B-) у меня два двигателя, управление правым джойстиком.
аппа 6 канальная… ( Flysky FS-CT6B-) у меня два двигателя, управление правым джойстиком.
Я подключил заведомо рабочие модемы с квадрика, на обеих модемах подключенный к АРМ - красный светодиод мигает в пол накала.
как управлять без телеметрии для завоза в точку в авто режиме
Уточните, что Вы называете “без телеметрии”?
Если без этих модулей

, то сначала подключаетесь шнурком к GCS, вводите координаты точки сброса и после координат точки добавляете строку с командой DO_SET_SERVO с номером канала серво и длительностью импульса, соответствующей открытому положению. В примере ниже управление серво 10-го канала, в ППМ1 - 1700мс, в ППМ3 -1900мс, ППМ5 - опять 1700мс.
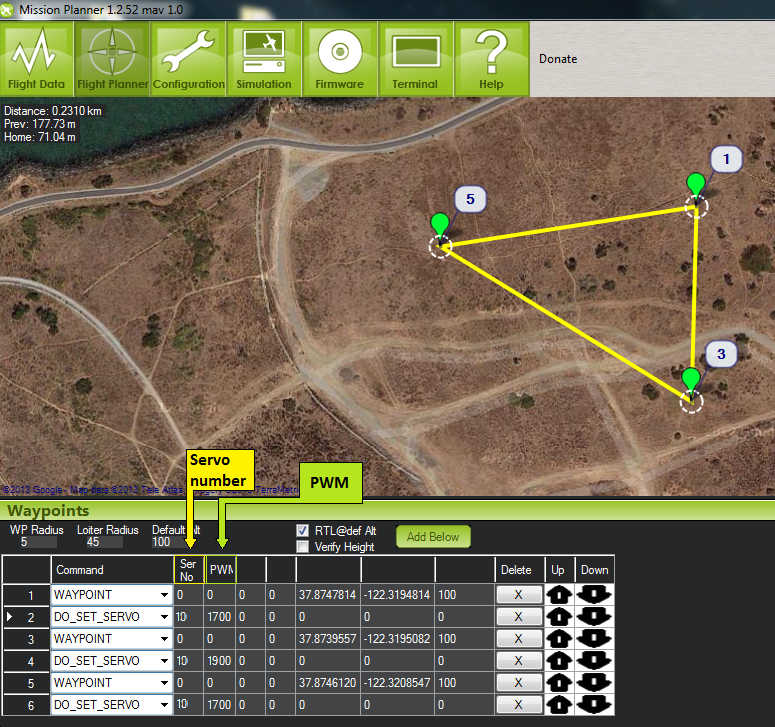
Если надо открыть/закрыть удобно использовать DO_REPEAT_SERVO

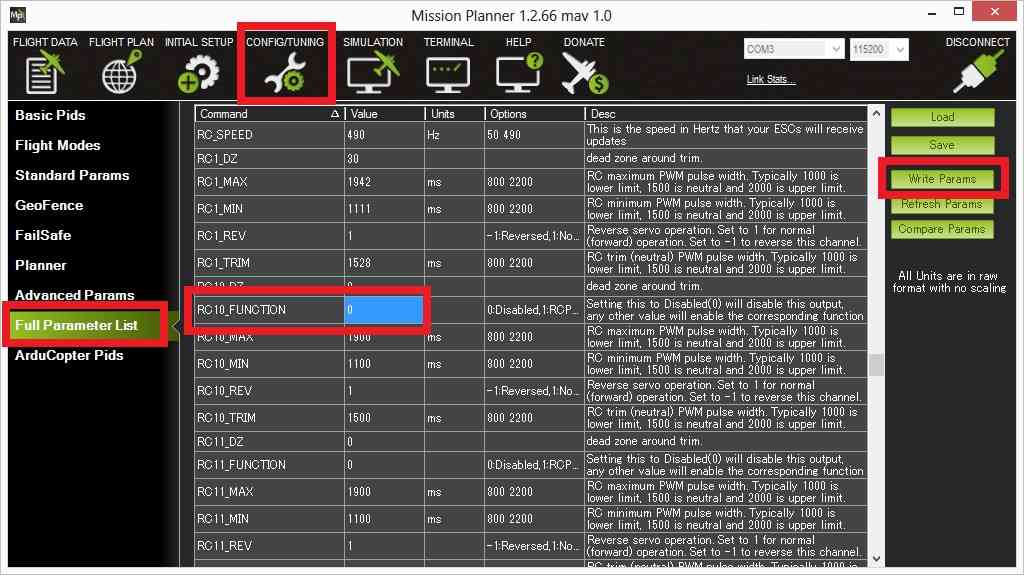
В этом случае указывается открытое положение серво, кол-во срабатываний и длительность паузы. Закрытое положение серво заранее указывается в таблице параметров в строке RCn_TRIM. Так же в таблице параметров надо выделенному серво установить параметр RCn_FUNCTION=0
После ввода маршрута, сохраняете его в АРМ, отстыковываете шнурок, отправляете кораблик в плавание и включаете режим АВТО.
Спасибо, будем пробовать…