Автопилот Arduplane - открытое ПО

Пролистнув, ничего такого критического не нашел, надо ли перешиваться?
на некоторых моделях ЛК мы замечали что после входа в перевернутый штопор самостоятельно не выходит, помогает только полное отклонение питча на пару секунд
судя по этой заметке - - more reliable recovery from inverted flight
возможно пофиксили
Здравствуйте! Не получается у меня нормально настроить элевоны на ЛК. Перепробовал 2 возможных способа:
- когда элевоны миксятся на передатчике.
- когда элевоны миксит сам APM.
Оба варианта получились, но у каждого что-то не так. В первом варианте управление стиками-идеальное, но если наклонить модель посильнее, то компенсируя уходят в максимальные расходы(у меня уже дырка в пенопласте от кабанчика). Во втором варианте стабилизация происходит нормально, но управление по одному каналу урезается на 50%. То есть чтобы достичь максимальных расходов, нужно одновременно отклонить гуль высоты и элероны. Ясно, что оба варианта не устраивают. Есть способы решения?
Во втором варианте стабилизация происходит нормально, но управление по одному каналу урезается на 50%
mixin gain увелич до 1
В прошивках выше 2.7Х микширует АПМ.
Отклонения настройте в ручном режиме с помощью длины плеча качалок и высоты кабанчиков, чтоб при максимальных отклонениях ничего не ломало и не выворачивало и был рекомендуемый угол отклонения поверхностей. Тогда в стабе будет полный порядок.
при включении микширования в стандартных настройках АПМ занижает углы отклонения для любых микшеров, сам с этим столкнулся. никаких качалок не нужно переставлять, нужно просто этот коифициент микширования увеличить, т.к. он по дефолту 0.5
качалки нужно ставить чтобы при комфортном для серв режиме достигались необходимые для модели углы отклонения рулевых плоскостей.
если наработок и доки по модели нет можно оттолкнуться от 15 градусов в каждую сторону.
при этом желательно чтобы пвм сигналы управления были в диапазоне 1000-2000мс, этот сигнал понимают все версии ппм энкореров, если есть уверенность что с ппм энкодером все нормуль то можно расширить по необходимости ендпоинты до 800-2200. разумеется при этом ничего никуда не должно упираться.
микшировать желательно внутри апм,
после изменения ендпоинтов в аппе нужно перекалибровать радио в мишен планере
насчет коэф микширования уже сказали.
800-2200
Для arduplane 900-2100 кажись предел.
вчера весь вечер ковырял АРМ, перепробовал неколько модемов - на 915, 868 и 433 и выяснил проблему внезапных включений ФС! В МР во вкладке ФС стояла галочка в пункте GCS - это failsafe по телеметрии, короче он и убивал управление, врубая RTL
mixin gain увелич до 1
Ага, если бы. Увеличив до одного, суммарный коэффициент двух каналов будет 2( если отклонить и руль высоты и элероны одновременно), тогда вообще в край выходит.
Ага, если бы. Увеличив до одного, суммарный коэффициент двух каналов будет 2( если отклонить и руль высоты и элероны одновременно), тогда вообще в край выходит.
А вы напишите формулу, по какой хотите, чтобы элероны двигались
Э1 = f1(РВ, РН)
Э2 = f2(РВ, РН)
где Э1, Э2 - элевоны, РВ, РН - управляющие воздействия (руль высоты, руль направления). Все, допустим, в диапазонах от -1 до 1, где 1 и -1 - полные отклонения в каждую сторону.
Тогда будет понятно, что вы хотите.
у меня самолет с V хвостом, так же по началу включал элевоны. Mixi_gain = 1. самолету еще ничего не оторвало. но чукча не читатель, чукча писатель…
А вот такое тут обсуждали? Вроде на том же чипе что и APM, должна держать ардуплэйн прошивку… Никто не пробовал? Интересная реализация подключения антенны GPS по SMA кабелю.
но чукча не читатель, чукча писатель…
Вы не верите, мне, что у меня на самолёте от кабанчиков прорези уже стоят от всех попыток? На форум я обращаюсь в последнюю очередь, поэтому все mixing_gain, elevon_mixing, и тд, уже досканально изучил, но результат не устраивает. От неполных расходов 50% на ролл, 50% на питч и 100%, только если отклонить правый стик в угол (мод2) - вообще не хорошо. При mixing_gain1, все работает нормально, но если отклонить одновременно руль высоты и элероны, то расходы получается 200% (что и есть в вышеприведенной формуле).
А вы напишите формулу, по какой хотите, чтобы элероны двигались
Меня больше устраивает такая функция E=(РВ+РН) в области [к1;к2], где Е - элевон, РВ, РН- сигнал соответствующий, к1,к2 - конечные точки, и будет счастье. Не могу понять, почему нет основных root настроек, за которые не может выходить ни один процесс в APM. Я программист, поменял бы, да язык не мой…
Меня больше устраивает такая функция E=(РВ+РН) в области [к1;к2], где Е - элевон, РВ, РН- сигнал соответствующий, к1,к2 - конечные точки, и будет счастье. Не могу понять, почему нет основных root настроек, за которые не может выходить ни один процесс в APM. Я программист, поменял бы, да язык не мой…
По идее так и есть с mixing gain 1. Ограничения (k1 = ROLL.MIN + PITCH.MIN, k2 = ROLL.MAX+PITCH.MAX). Насчет РН я ошибся, там же не руль направления, а крен на входе. Ограничения должны быть установлены и на радио и в параметрах AP для соответствующих каналов.
Это что я в коде увидел. На деле не проверял, посмотрите.
Вообще смешение входных и выходных каналов в ardupilot - это чистое зло. Понятно, что так исторически сложилось, но сейчас из-за того, что каналы и их настройки (MIN, MAX, TRIM) используется для входа и для выхода по-разному в зависимости от функции - жесть.
Ограничения (k1 = ROLL.MIN + PITCH.MIN, k2 = ROLL.MAX+PITCH.MAX).
Хотя, в этом случае расходы зажатыми тоже оказываются…
Кстати, там же два способа настройки элевонов. Если ELEVON_OUTPUT, то попробуйте ограничения MIN-MAX, которые к каналам элевонов относятся.
Может кто знает или есть опыт, если АПМ 2.6 прошить под s.bus, то будет ли он принимать флаг FS о потере связи от lrs примника?
то будет ли он принимать флаг FS о потере связи от lrs примника
должен
Подскажите, как использовать APM в качестве простой стабилизации? Не подключая GPS, без газа, только элероны+РВ. Просто при отпущенных стиках выравнивать самолет в горизонт и все, наподобие guarduan. Какой flight mode использовать?
Требуется соответствующе настроить, убрать предполетные проверки, подключить только сервы элеронов и руль высоты к апм и на все полетные режимы выбрать stab
И мне интересен данный момент, думаю вместо простого стабилизатора, лучше купить еще один АПМ, он получается с запасом на будущие
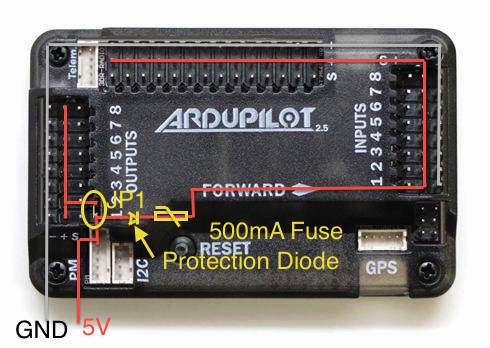
Хорошо если возможно. Тогда вопрос по питанию APM pro:

Самого запитать от PM, понятно. Как запитать сервы? Есть BEC от ESC, есть отдельный. Я не нашел пока про питание APM pro. Есть там какие перемычки или как там вообще организовано?
Раньше было так, все понятно:
Может кто кинет ссылку? Ну и на будущее, придется запитывать радиомодем и OSD, все отдельно как я понимаю.
самолет в горизонт
на все полетные режимы выбрать stab
Для выравнивания в горизонт лучше выбрать режим FBWA