Автопилот Arduplane - открытое ПО

качалки нужно ставить чтобы при комфортном для серв режиме достигались необходимые для модели углы отклонения рулевых плоскостей.
если наработок и доки по модели нет можно оттолкнуться от 15 градусов в каждую сторону.
при этом желательно чтобы пвм сигналы управления были в диапазоне 1000-2000мс, этот сигнал понимают все версии ппм энкореров, если есть уверенность что с ппм энкодером все нормуль то можно расширить по необходимости ендпоинты до 800-2200. разумеется при этом ничего никуда не должно упираться.
микшировать желательно внутри апм,
после изменения ендпоинтов в аппе нужно перекалибровать радио в мишен планере
насчет коэф микширования уже сказали.
800-2200
Для arduplane 900-2100 кажись предел.
вчера весь вечер ковырял АРМ, перепробовал неколько модемов - на 915, 868 и 433 и выяснил проблему внезапных включений ФС! В МР во вкладке ФС стояла галочка в пункте GCS - это failsafe по телеметрии, короче он и убивал управление, врубая RTL
mixin gain увелич до 1
Ага, если бы. Увеличив до одного, суммарный коэффициент двух каналов будет 2( если отклонить и руль высоты и элероны одновременно), тогда вообще в край выходит.
Ага, если бы. Увеличив до одного, суммарный коэффициент двух каналов будет 2( если отклонить и руль высоты и элероны одновременно), тогда вообще в край выходит.
А вы напишите формулу, по какой хотите, чтобы элероны двигались
Э1 = f1(РВ, РН)
Э2 = f2(РВ, РН)
где Э1, Э2 - элевоны, РВ, РН - управляющие воздействия (руль высоты, руль направления). Все, допустим, в диапазонах от -1 до 1, где 1 и -1 - полные отклонения в каждую сторону.
Тогда будет понятно, что вы хотите.
у меня самолет с V хвостом, так же по началу включал элевоны. Mixi_gain = 1. самолету еще ничего не оторвало. но чукча не читатель, чукча писатель…
А вот такое тут обсуждали? Вроде на том же чипе что и APM, должна держать ардуплэйн прошивку… Никто не пробовал? Интересная реализация подключения антенны GPS по SMA кабелю.
но чукча не читатель, чукча писатель…
Вы не верите, мне, что у меня на самолёте от кабанчиков прорези уже стоят от всех попыток? На форум я обращаюсь в последнюю очередь, поэтому все mixing_gain, elevon_mixing, и тд, уже досканально изучил, но результат не устраивает. От неполных расходов 50% на ролл, 50% на питч и 100%, только если отклонить правый стик в угол (мод2) - вообще не хорошо. При mixing_gain1, все работает нормально, но если отклонить одновременно руль высоты и элероны, то расходы получается 200% (что и есть в вышеприведенной формуле).
А вы напишите формулу, по какой хотите, чтобы элероны двигались
Меня больше устраивает такая функция E=(РВ+РН) в области [к1;к2], где Е - элевон, РВ, РН- сигнал соответствующий, к1,к2 - конечные точки, и будет счастье. Не могу понять, почему нет основных root настроек, за которые не может выходить ни один процесс в APM. Я программист, поменял бы, да язык не мой…
Меня больше устраивает такая функция E=(РВ+РН) в области [к1;к2], где Е - элевон, РВ, РН- сигнал соответствующий, к1,к2 - конечные точки, и будет счастье. Не могу понять, почему нет основных root настроек, за которые не может выходить ни один процесс в APM. Я программист, поменял бы, да язык не мой…
По идее так и есть с mixing gain 1. Ограничения (k1 = ROLL.MIN + PITCH.MIN, k2 = ROLL.MAX+PITCH.MAX). Насчет РН я ошибся, там же не руль направления, а крен на входе. Ограничения должны быть установлены и на радио и в параметрах AP для соответствующих каналов.
Это что я в коде увидел. На деле не проверял, посмотрите.
Вообще смешение входных и выходных каналов в ardupilot - это чистое зло. Понятно, что так исторически сложилось, но сейчас из-за того, что каналы и их настройки (MIN, MAX, TRIM) используется для входа и для выхода по-разному в зависимости от функции - жесть.
Ограничения (k1 = ROLL.MIN + PITCH.MIN, k2 = ROLL.MAX+PITCH.MAX).
Хотя, в этом случае расходы зажатыми тоже оказываются…
Кстати, там же два способа настройки элевонов. Если ELEVON_OUTPUT, то попробуйте ограничения MIN-MAX, которые к каналам элевонов относятся.
Может кто знает или есть опыт, если АПМ 2.6 прошить под s.bus, то будет ли он принимать флаг FS о потере связи от lrs примника?
то будет ли он принимать флаг FS о потере связи от lrs примника
должен
Подскажите, как использовать APM в качестве простой стабилизации? Не подключая GPS, без газа, только элероны+РВ. Просто при отпущенных стиках выравнивать самолет в горизонт и все, наподобие guarduan. Какой flight mode использовать?
Требуется соответствующе настроить, убрать предполетные проверки, подключить только сервы элеронов и руль высоты к апм и на все полетные режимы выбрать stab
И мне интересен данный момент, думаю вместо простого стабилизатора, лучше купить еще один АПМ, он получается с запасом на будущие
Хорошо если возможно. Тогда вопрос по питанию APM pro:

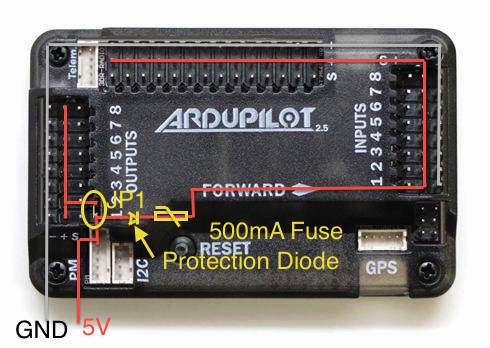
Самого запитать от PM, понятно. Как запитать сервы? Есть BEC от ESC, есть отдельный. Я не нашел пока про питание APM pro. Есть там какие перемычки или как там вообще организовано?
Раньше было так, все понятно:
Может кто кинет ссылку? Ну и на будущее, придется запитывать радиомодем и OSD, все отдельно как я понимаю.
самолет в горизонт
на все полетные режимы выбрать stab
Для выравнивания в горизонт лучше выбрать режим FBWA
Для выравнивания в горизонт лучше выбрать режим FBWA
можно подробнее, в чем отличие от STABILIZE, чем лучше? А есть еще и TRAINER вроде.
Stabilize стабилизирует полет, FBWA удерживает в горизонте, подробнее тут ardupilot.org/plane/docs/flight-modes.html
Я почему спрашиваю, про режим STABILIZE написано: RC control with simple stabilization. If you let go of the sticks then Plane will level the plane.
В вольном переводе “Если вы отпускаете стики, Plane выравнивает самолет”. Про FBWA такого не написано. Нужен просто режим 2D как у guardian 2d/3d стабилизатора.
В stabilize поведение от стиков похоже на ручное, в FBWA углы ограничены.
Тогда вопрос по питанию APM pro
теоретически раз есть девайс то должен быть его изобретатель и производитель,
помимо отгрузки товара на продавце обычно лежит обязанность техподдержки
или хотябы предоставления документации