Автопилот Arduplane - открытое ПО

Меня больше устраивает такая функция E=(РВ+РН) в области [к1;к2], где Е - элевон, РВ, РН- сигнал соответствующий, к1,к2 - конечные точки, и будет счастье. Не могу понять, почему нет основных root настроек, за которые не может выходить ни один процесс в APM. Я программист, поменял бы, да язык не мой…
По идее так и есть с mixing gain 1. Ограничения (k1 = ROLL.MIN + PITCH.MIN, k2 = ROLL.MAX+PITCH.MAX). Насчет РН я ошибся, там же не руль направления, а крен на входе. Ограничения должны быть установлены и на радио и в параметрах AP для соответствующих каналов.
Это что я в коде увидел. На деле не проверял, посмотрите.
Вообще смешение входных и выходных каналов в ardupilot - это чистое зло. Понятно, что так исторически сложилось, но сейчас из-за того, что каналы и их настройки (MIN, MAX, TRIM) используется для входа и для выхода по-разному в зависимости от функции - жесть.
Ограничения (k1 = ROLL.MIN + PITCH.MIN, k2 = ROLL.MAX+PITCH.MAX).
Хотя, в этом случае расходы зажатыми тоже оказываются…
Кстати, там же два способа настройки элевонов. Если ELEVON_OUTPUT, то попробуйте ограничения MIN-MAX, которые к каналам элевонов относятся.
Может кто знает или есть опыт, если АПМ 2.6 прошить под s.bus, то будет ли он принимать флаг FS о потере связи от lrs примника?
то будет ли он принимать флаг FS о потере связи от lrs примника
должен
Подскажите, как использовать APM в качестве простой стабилизации? Не подключая GPS, без газа, только элероны+РВ. Просто при отпущенных стиках выравнивать самолет в горизонт и все, наподобие guarduan. Какой flight mode использовать?
Требуется соответствующе настроить, убрать предполетные проверки, подключить только сервы элеронов и руль высоты к апм и на все полетные режимы выбрать stab
И мне интересен данный момент, думаю вместо простого стабилизатора, лучше купить еще один АПМ, он получается с запасом на будущие
Хорошо если возможно. Тогда вопрос по питанию APM pro:

Самого запитать от PM, понятно. Как запитать сервы? Есть BEC от ESC, есть отдельный. Я не нашел пока про питание APM pro. Есть там какие перемычки или как там вообще организовано?
Раньше было так, все понятно:
Может кто кинет ссылку? Ну и на будущее, придется запитывать радиомодем и OSD, все отдельно как я понимаю.
самолет в горизонт
на все полетные режимы выбрать stab
Для выравнивания в горизонт лучше выбрать режим FBWA
Для выравнивания в горизонт лучше выбрать режим FBWA
можно подробнее, в чем отличие от STABILIZE, чем лучше? А есть еще и TRAINER вроде.
Stabilize стабилизирует полет, FBWA удерживает в горизонте, подробнее тут ardupilot.org/plane/docs/flight-modes.html
Я почему спрашиваю, про режим STABILIZE написано: RC control with simple stabilization. If you let go of the sticks then Plane will level the plane.
В вольном переводе “Если вы отпускаете стики, Plane выравнивает самолет”. Про FBWA такого не написано. Нужен просто режим 2D как у guardian 2d/3d стабилизатора.
В stabilize поведение от стиков похоже на ручное, в FBWA углы ограничены.
Тогда вопрос по питанию APM pro
теоретически раз есть девайс то должен быть его изобретатель и производитель,
помимо отгрузки товара на продавце обычно лежит обязанность техподдержки
или хотябы предоставления документации
Погуглив еще, нашел вот это. Лучше чем ничего.
Что до продавцов, они не сильно озадачиваются поддержкой и снабжением документацией. Было только обозначение контактов.
Есть тут пользователи APM pro? Купился на малый размер, стандартные разъемы для серв, меньшая цена, якобы тот же функционал что и у версии 2.6.
В stabilize поведение от стиков похоже на ручное, в FBWA углы ограничены.
но в горизонт выводят оба?
Погуглив еще, нашел вот это. Лучше чем ничего.
Что до продавцов, они не сильно озадачиваются поддержкой и снабжением документацией. Было только обозначение контактов.
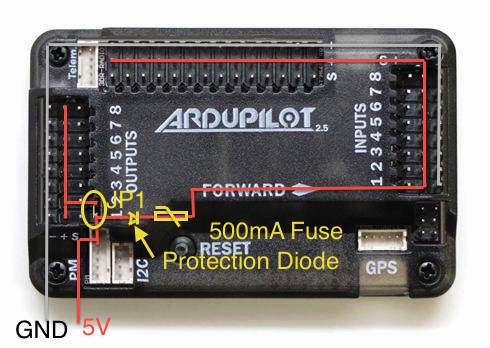
судя по описанию подайте стабильные 5.0 вольт от хорошего бп на v+ рейки входов
Собственно вот кое-какая инфа по питанию.
судя по описанию подайте стабильные 5.0 вольт от хорошего бп на v+ рейки входов
тоже так подумалось. будем пробовать.
Надо будет в выходные попробовать ради интереса.
Попробовал подключить к апм цифровой датчик воздушной скорости, подcоединил в i2c. Так как у меня внешний компасс, подключил все хозяйство через сплитер. В МиссионПланнере выбрал ARSPD_PIN=65. Все работает, воздушную скорость показывает.
Хорошо если возможно. Тогда вопрос по питанию APM pro:
Самого запитать от PM, понятно. Как запитать сервы? Есть BEC от ESC, есть отдельный. Я не нашел пока про питание APM pro. Есть там какие перемычки или как там вообще организовано?
Раньше было так, все понятно:
Может кто кинет ссылку? Ну и на будущее, придется запитывать радиомодем и OSD, все отдельно как я понимаю.
стоит на крыле х8, контроллер отличный. питание от стандартного модуля. и хоббивинговскый 3 амперный бек на планку серв, там внутри ест диод, и питание серв работает и как резервное питание для платы,при отказе пм.
Нужен просто режим 2D как у guardian 2d/3d стабилизатора.
Если сравнивать с гардианом то 2D это FWBA, 3D это Stabilize
питание от стандартного модуля. и хоббивинговскый 3 амперный бек на планку серв, там внутри ест диод
а перемычка JP1 как бы разомкнута уже?
и еще, поролон на бародатчик надо запихивать внутрь или он уже есть там?
а перемычка JP1 как бы разомкнута уже?
и еще, поролон на бародатчик надо запихивать внутрь или он уже есть там?
перемычки там нет, там развязывающий диод, паралон на баро в моем экземпляре было, но доверять китайцам не стоит , лучше открутит 4 винтика и проверит,за одно и качество пайки посмотреть:)