Автопилот Arduplane - открытое ПО

У меня были проблемы только с РТХ при сильном ветре…заказал такой датчик
ru.aliexpress.com/item/…/32688437198.html
Кто такой юзал ?
А я летаю, как и тысячи других.
Пятеро из шести докторов утверждают что игра в русскую рулетку абсолютно безопасна.
Покажи.
Меньше знаешь - дольше спишь.
Не нравятся мои тезисы не используй, а лучше не общайся со мной, все что я пишу основано на моем личном опыте, где и как я его получил разглашать или нет моё личное право, успехов.
Тезисы, не подкрепленные фактами, не несут никакой ценности, а только вопросы вызывают.
Не нравятся мои тезисы не используй, а лучше не общайся со мной, все что я пишу основано на моем личном опыте, где и как я его получил разглашать или нет моё личное право, успехов.
Писец, задело.
А на хера тогда вообще писать в теме Ардупилот самолёт? Чтобы тебя не читали? Тут вполне взрослые люди с опытом и амбициями летают, делятся своим опытом, достижениями, отвечают новичкам, создаётся впечатление, что человек, сменивший место жительство на Москва, вдруг стал ГУРУ. И этот ГУРУ, сравший во всех темах по автопилотам, стал противником и родной темы. ГУРУ, ни одного нормального видео не выложивший вдруг стал выше всех. Убил на взлёте МиниТалон и тут вдруг лучший знаток автопилотов.
Просто ЧМО, тебе наверно и девки не дают, потому что говном пахнет за километр.
Понимаю, что в баню отправят после этого поста. Но что есть.
зря вы тут ссоритесь, апм или пикс не повод для разборок.
в принципе и апм утрет нос 90% полетных контроллеров по функционалу.
но тем кто полностью освоил функционал и хочет идти дальше нужен 32 битный контроллер
при нынешних ценах это уже не вопрос идеологии , можно взять и то и другое
но с другой стророны, вот превосходная фича - автоматический уход на второй круг, появилась в прошивках для пикса. кто нибудь пробовал?
АПМ работает как калашников уже 3 года и на самолете и на коптере, никаких глюков нет. Настройки - только автотюн. Многие видели, что я на нем наснимал. Все остальные мнения - от рукожопости.
Алексей, вот единственное что расстроило - при 0 спутников и ФС, он продолжает лететь прямо, а не кружить, как мы однажды обсуждали. И это совсем неправильно. Может есть настройки?
Кто такой юзал ?
Самый ходовой. Проблема только однажды возникла, рядом с 1,5-ваттным видеопередатчиком, а так - без нареканий.
Все остальные мнения - от рукожопости.
А срач на форуме - от нежелания это признавать:)
Алексей, вот единственное что расстроило - при 0 спутников и ФС, он продолжает лететь прямо, а не кружить, как мы однажды обсуждали. И это совсем неправильно. Может есть настройки?
не встречал такого,
при потере жпс (что само по себе достаточно сложно достичь) должен включаться циркл,
наблюдали такое несколько раз.
однажды поставили на самоль новые винты от безалаберности даже не проверили балансировку.
тряска была такова что как только даешь газ жпс теряет спутники
еще несколько экспериментов делали наши коллеги будучи приглашенными на испытания военных глушилок в качестве мишени)
на расстоянии порядка километра от радара если самолет наклонен в сторону глушилки жпс теряет сигнал, встает в циркл, постепенно отворачивается к радару экранированной стороной и жпс снова находит спутники)
но в наших тестах есть нюанс. мы не ставим юблокс на самолеты. чипы приемников - медиатек. чипсет mt3333. возможно есть специфика
Потерять спутники в ближайшем подмосковье сейчас - дело пяти минут. Я проверял два раза, при включении РТЛ и 0 спутников - полет по прямой. Последняя прошивка в АПМ.
Тип ЖПС роли играть не может ну совсем никак. 0 он и есть 0.
у юблокса есть такая дурная привычка показывать позицию очень уж из далека, спутников ноль. хдоп наверное с точностью до попадания в земной шарик. а координаты все равнокакие то шлет и в мишене эта координата может погулять по каспию, заглянуть в казань, слетать в европу. зачастую это поведение видно в мишен планере, медиатек же не выдает позицию пока нормально не захватит с точностью скажем до 10 метров. и еще 3.4 прошиву было лень пересобирать под нмеа. поэтому летаем на ардуплейн 3.3 с нмеа она лежит тут hobby.msdatabase.ru/…/arduplane-3-3-firmware
на бн-880 ни разу такого не замечал. с координатами все в порядке. не скачют.
при потере жпс (что само по себе достаточно сложно достичь) должен включаться циркл,
наблюдали такое несколько раз
кстати, при просто потере спутников - самолет продолжает лететь без малейших изменений в поведении, это проверенно многократно, потому что спутники потерять сейчас можно 100% в целом ряде мест, которые я конкретно могу показать на карте, и это могут подтвердить еще несколько пилотов.
собственно это происходит в половине ближнего подмосковья, начиная с высоты 100 метров, так что потерять спутники, само по себе, уже давно элементарно.
у меня впечатление, что у нас разные апмы, жпсы и мы живем в разных городах.
я сделал за последние пару месяцев более 40 вылетов в разных местах, и у меня очень четкая статистика.
то что серкл не включается по умолчанию - это 100%.
ни одного нормального видео не выложивший
Да он рекордсмен вроде. За самолетом его везли на машине, а он визуально управлял, в общем рекорд по дальность. Гы 😃
для начала можно попробовать откатиться на мою прошиву 3.3 могу выдать жпс для тестов
вот изменения ардуплейн 3.4
discuss.ardupilot.org/t/…/6727
в частности написано
Even to get this release onto the APM1/APM2 we had to make sacrifices in terms of functionality. The APM1/APM2 release is missing quite a few features that are on the Pixhawk and other boards. For example:
[li]no advanced failsafe support[/li]
а судя по доке события файилсэйф жпса обрабатываются именно адвансед файилсэйф модулем
ardupilot.org/…/advanced-failsafe-configuration.ht…
собственно первое что следует проверить - откатиться на 3.3
и подтверждение что вы не первый кто с этим столкнулся discuss.ardupilot.org/t/…/25814
Дмитрий, проблему решили? Отпишитесь плиз.
Потерять спутники в ближайшем подмосковье сейчас - дело пяти минут.
После настройки Калмана можно лететь на инерциалке, с довольно приличной точностью.
За самолетом его везли на машине
На что хватило со школьных завтраков в 8-9 классах, на том и летал, и тем не менее уже в то время свободно налетывал по 150 км, еще толком не зная про кучи параметров оптимизации. Спасибо тем людям кто в меня на тот момент вкладывал собственный опыт.
медиатек же не выдает позицию пока нормально не захватит с точностью скажем до 10 метров
Опять же решается настройкой EKF там несколько параметров для этих целей. Но на сколько помню только для пиксов EKF доступен.
P.S.
Но что есть.
Умилило) А сколько у тебя единомышленников, круть)))
А на хера тогда вообще писать в теме Ардупилот самолёт?
От ведь, для тебя стараюсь, было бы равнодушно я бы вообще на форум не заходил, и так времени нет. Есть банальные понятие надежности железа и алгоритмов, и мягко говоря у АПМ они никакие даже пусть в сравнении с теми-же новыми прошивками, как уже писал до этого русская рулетка. Кому-то везет, кому-то нет.
Сенсоров должно быть несколько, китайское глюкалово лично мне разложило ни один аппарат и опрос их должен быть не на одной шине SPI как сделано в pix2, должна быть термокомпенсация, на край подогрев сенсоров, трассировка платы должа включать несколько источников питания, должна быть разводка питания отдельная для логической цепи и силовой. Фильтры от ESR вообще штатная вещь, даже в некоторых модельных сервах их применяют.
Ну где это все в АПМ???
И мне при этом пишут что АРМ надежен потому что налетал десятки часов, ну смешно что сказать.
А потом обиженного из себя строишь видите-ли задело. Круть чё.
На личности переходить не стоит, побереги нервы.
P.P.S
Посмотрите как реализован АП хотябы на DJI мавик там большинство из этого есть и это все равно остается ИГРУШКОЙ.
Что касается срешь в родной теме.
Огонь, я ни разу нигде не говорил что ардупилот это плохо, это единственный адекватный автопилот, код отлажен и не выдает сбоев при правильной вдумчивой настройке. Но только на новых прошивках и на новом железе.
Большинство используемых моделистами АП и от других производителей, не имеют никаких дублирований, и прочих понтов и сотни людей на них летают. Все коптер-рейсеры летают на платах с одним датчиком, который еще и колотят беспощадно день и ночь, и что-то я ни разу не слышал о том, что бы в полете отказала гира. Поэтому, как говорится - давайте без фанатизма. АПМ надежный автопилот, и точка. Летать в полях на пене - ничего больше не нужно. А многие тут только так и летают.
Большинство используемых моделистами АП и от других производителей, не имеют никаких дублирований, и прочих понтов и сотни людей на них летают.
Начиная с пикса есть дублирование IMU, для PIX2 оно трехкратное с подогревом, но как писал выше есть загвоздка. А что касается дронрейсеров так там это вынужденная мера ввиду миниатюризации всего и вся.
Про точку; на вкус и цвет, каждому своё.
После настройки Калмана можно лететь на инерциалке, с довольно приличной точностью.
инерциалка реализованная на сенсорах апм достоверна примерно 5 сек, затем реальная и прогнозируемая позиция начинает стремительно разбегаться
в условиях пикса с идеалной калибровкой, демпфированеием 10сек. слишком неточные сенсоры
Дмитрий, проблему решили? Отпишитесь плиз.
Пока нет, жду погоду. Ветра какие-то дикие в независимости от времен суток.
На элероны ноль выставил, но пришлось еще в калибровке аппы реверсы изменить. Реагирует теперь адекватно. Жду погоду для облета и калибровки датчика скорости, там посмотрим
Начиная с пикса есть дублирование IMU, для PIX2 оно трехкратное с подогревом, но как писал выше есть загвоздка. А что касается дронрейсеров так там это вынужденная мера ввиду миниатюризации всего и вся.
Про точку; на вкус и цвет, каждому своё.
Похоже Чибиос у всех отлично работает, и несмотря на 10 сенсоров, и кондиционер в Пиксхоке 2 - все скоро будут летать на Ф4 с Ардупайлотом. На одной гире, на китайских клонах - и горя не знать. Такова жизнь. Цена решает.
И кстати, тогда - прощай Айнав. Не долго мучилась старушка…
должна быть термокомпенсация, на край подогрев сенсоров, трассировка платы должа включать несколько источников питания, должна быть разводка питания отдельная для логической цепи и силовой. Фильтры от ESR вообще штатная вещь, даже в некоторых модельных сервах их применяют.
что за фильтры такие? откуда дровишки? может ESD / EMI protection (грозозащита и защита от электромагнитных наводок?)
в пиксе есть несколько проходных кондеров для того чтобы можно было в “резюме” упомянуть что на схеме использованы защитные элементы, но их применение не системное, т.е. защищенное пространство не закрыто экраном и внешние входные линии не имеют защитную обвязку (как к примеру это реализовано практически на любых автомобильных устройствах)
в пиксе есть специализированные контроллеры управления питанием но толку от них не больше чем от пары диодов - после прохождения через этот контроллер напряжение питания периферии нестабильно, к примеру если пикс питается от 5 вольт то без нагрузки на внешних портах будет 4,9 а под нагрузкой 1А уже 4,7V в принципе это не беда если у периферии встроенный стабилизатор и ядро работает от 3,3 вольт, а если это мощный модем питающийся только от четких 5вольт то у него мощность при 4,7 падает почти вдвое. Спрашивается нафига нужен такой контроллер управления питанием.
Подогрев иму, теоретически нужен для условий быстрого запуска для полетов при температурах -30 и ниже, т.к. ттх некоторых сенсоров не предусматривают запуск в таких условиях, т.е. в результате программной компенсации при нагреве до рабочих температур программная компенсация не достаточно точна. Что же делать если нет подогрева иму? для запуска аппарата в лютый мороз достаточно дать ему поработать в реальных условиях минут 5, он сам прогреется до штатной температуры, затем перезагурзить - при этом полетник перекалибрует гироскопы.
другое дело что если говорить про сравнение пикс супротив апм то неоспоримо у пикса 32 битный процессор, куча памяти под прошивку и оперативки, изза нехватки памяти прошивка апм уже много лет как не обновляется,
логи на апм весьма скудные и места в флешке на 20 минут, для многих применений важны длительные и подробные логи полета.
Посмотрите как реализован АП хотябы на DJI мавик там большинство из этого есть и это все равно остается ИГРУШКОЙ
с точки зрения защиты от помех и экранирования мавик на голову выше пикса, в нем применено экранирование отдельно для каждой подсистемы, очень правильно обвязаны входы блоков для защиты от наводок,
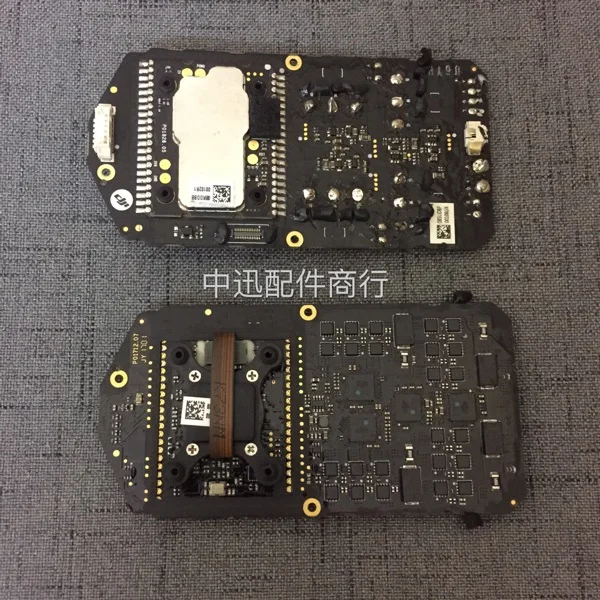
а жпс мавика - просто шедевр с точки зрения как нужно готовить питание для навигационного модуля и экранировать приемник, в результате совершенно типовой жпс модуль ubloxm8q установленный в нем ловит спутники быстрее, лучше показатель сигнал/шум и в результате захват происходит в совершенно невероятных условиях а позиция существенно точнее собратьев к которым не приложили руку толковые инженеры.
с точки зрения применения мавик позиционируется как гаджет, те. в нем умышленно не стали развивать функционал на все случаи жизни как это сделано в ардупилоте, оставлено только самое нужное для конкретного применения.
на фото полетный контроллер мавика
блок процессора закрытый экраном на верхней фото
другое дело что если говорить про сравнение пикс супротив апм то неоспоримо у пикса 32 битный процессор, куча памяти под прошивку и оперативки, изза нехватки памяти прошивка апм уже много лет как не обновляется,
логи на апм весьма скудные и места в флешке на 20 минут, для многих применений важны длительные и подробные логи полета.
Тоже считаю, что это основные критерии предпочтения Пикса, а не все то, что Андрей описал.
Но по сути мы получаем это все и на Ф4 - поэтому в Пиксах особого смысла уже тоже нет, особенно для тех, кого и АПМ устраивает.
функционал на все случаи жизни как это сделано в ардупилоте
Как выяснилось уже не на все. В Питлабе есть очень крутые фишки, которых нет в Ардупайлоте, по типу нормального осд, отрисовки взлетки, радара других пилотов, передачи телеметрии через видео тракт, штатной поворотки и другого, что очень нужно именно хоббистам. И нужно признать, это делает его интереснее Пикса для многих, поскольку все Пиксовские навороты им не нужны, а Питлабовские - пригодились бы.
Ну кто летает в Москве при -30? Никто. Подогрев сенсоров - смешная опция, в этом случае.