Автопилот Arduplane - открытое ПО

После настройки Калмана можно лететь на инерциалке, с довольно приличной точностью.
инерциалка реализованная на сенсорах апм достоверна примерно 5 сек, затем реальная и прогнозируемая позиция начинает стремительно разбегаться
в условиях пикса с идеалной калибровкой, демпфированеием 10сек. слишком неточные сенсоры
Дмитрий, проблему решили? Отпишитесь плиз.
Пока нет, жду погоду. Ветра какие-то дикие в независимости от времен суток.
На элероны ноль выставил, но пришлось еще в калибровке аппы реверсы изменить. Реагирует теперь адекватно. Жду погоду для облета и калибровки датчика скорости, там посмотрим
Начиная с пикса есть дублирование IMU, для PIX2 оно трехкратное с подогревом, но как писал выше есть загвоздка. А что касается дронрейсеров так там это вынужденная мера ввиду миниатюризации всего и вся.
Про точку; на вкус и цвет, каждому своё.
Похоже Чибиос у всех отлично работает, и несмотря на 10 сенсоров, и кондиционер в Пиксхоке 2 - все скоро будут летать на Ф4 с Ардупайлотом. На одной гире, на китайских клонах - и горя не знать. Такова жизнь. Цена решает.
И кстати, тогда - прощай Айнав. Не долго мучилась старушка…
должна быть термокомпенсация, на край подогрев сенсоров, трассировка платы должа включать несколько источников питания, должна быть разводка питания отдельная для логической цепи и силовой. Фильтры от ESR вообще штатная вещь, даже в некоторых модельных сервах их применяют.
что за фильтры такие? откуда дровишки? может ESD / EMI protection (грозозащита и защита от электромагнитных наводок?)
в пиксе есть несколько проходных кондеров для того чтобы можно было в “резюме” упомянуть что на схеме использованы защитные элементы, но их применение не системное, т.е. защищенное пространство не закрыто экраном и внешние входные линии не имеют защитную обвязку (как к примеру это реализовано практически на любых автомобильных устройствах)
в пиксе есть специализированные контроллеры управления питанием но толку от них не больше чем от пары диодов - после прохождения через этот контроллер напряжение питания периферии нестабильно, к примеру если пикс питается от 5 вольт то без нагрузки на внешних портах будет 4,9 а под нагрузкой 1А уже 4,7V в принципе это не беда если у периферии встроенный стабилизатор и ядро работает от 3,3 вольт, а если это мощный модем питающийся только от четких 5вольт то у него мощность при 4,7 падает почти вдвое. Спрашивается нафига нужен такой контроллер управления питанием.
Подогрев иму, теоретически нужен для условий быстрого запуска для полетов при температурах -30 и ниже, т.к. ттх некоторых сенсоров не предусматривают запуск в таких условиях, т.е. в результате программной компенсации при нагреве до рабочих температур программная компенсация не достаточно точна. Что же делать если нет подогрева иму? для запуска аппарата в лютый мороз достаточно дать ему поработать в реальных условиях минут 5, он сам прогреется до штатной температуры, затем перезагурзить - при этом полетник перекалибрует гироскопы.
другое дело что если говорить про сравнение пикс супротив апм то неоспоримо у пикса 32 битный процессор, куча памяти под прошивку и оперативки, изза нехватки памяти прошивка апм уже много лет как не обновляется,
логи на апм весьма скудные и места в флешке на 20 минут, для многих применений важны длительные и подробные логи полета.
Посмотрите как реализован АП хотябы на DJI мавик там большинство из этого есть и это все равно остается ИГРУШКОЙ
с точки зрения защиты от помех и экранирования мавик на голову выше пикса, в нем применено экранирование отдельно для каждой подсистемы, очень правильно обвязаны входы блоков для защиты от наводок,
а жпс мавика - просто шедевр с точки зрения как нужно готовить питание для навигационного модуля и экранировать приемник, в результате совершенно типовой жпс модуль ubloxm8q установленный в нем ловит спутники быстрее, лучше показатель сигнал/шум и в результате захват происходит в совершенно невероятных условиях а позиция существенно точнее собратьев к которым не приложили руку толковые инженеры.
с точки зрения применения мавик позиционируется как гаджет, те. в нем умышленно не стали развивать функционал на все случаи жизни как это сделано в ардупилоте, оставлено только самое нужное для конкретного применения.
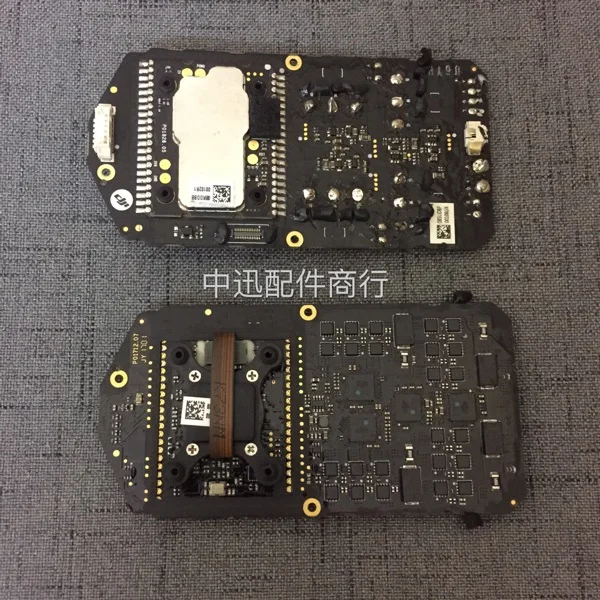
на фото полетный контроллер мавика
блок процессора закрытый экраном на верхней фото
другое дело что если говорить про сравнение пикс супротив апм то неоспоримо у пикса 32 битный процессор, куча памяти под прошивку и оперативки, изза нехватки памяти прошивка апм уже много лет как не обновляется,
логи на апм весьма скудные и места в флешке на 20 минут, для многих применений важны длительные и подробные логи полета.
Тоже считаю, что это основные критерии предпочтения Пикса, а не все то, что Андрей описал.
Но по сути мы получаем это все и на Ф4 - поэтому в Пиксах особого смысла уже тоже нет, особенно для тех, кого и АПМ устраивает.
функционал на все случаи жизни как это сделано в ардупилоте
Как выяснилось уже не на все. В Питлабе есть очень крутые фишки, которых нет в Ардупайлоте, по типу нормального осд, отрисовки взлетки, радара других пилотов, передачи телеметрии через видео тракт, штатной поворотки и другого, что очень нужно именно хоббистам. И нужно признать, это делает его интереснее Пикса для многих, поскольку все Пиксовские навороты им не нужны, а Питлабовские - пригодились бы.
Ну кто летает в Москве при -30? Никто. Подогрев сенсоров - смешная опция, в этом случае.
Но по сути мы получаем это все и на Ф4 - поэтому в Пиксах особого смысла уже тоже нет, особенно для тех, кого и АПМ устраивает.
если говорить про омнибусы то там проблема в том что изначально прошивка пикса туда не входила, использован проц меньшего размера (64 ноги) соотвественно нет модели с 2мб флеша
изначально туда казалось нереальным впихнуть ардупилот, но волшебники из команды разработчиков поколдовали и утоптали прошивку что стала помещаться,
на сегодняшний момент флешка забита около 80% и есть порядка 32кб рам с дефолтными настройками (без включения подвеса и ек3), но тенденция такова что этого запаса хватит не надолго
Ну кто летает в Москве при -30? Никто. Подогрев сенсоров - смешная опция, в этом случае.
москва - не вся россия, к примеру нефтянники что мониторят трубы круглогодично вынуждены летать не только когда это комфортно.
Форум для любителей, оставим нефтянников в покое.
но тенденция такова что этого запаса хватит не надолго
Ну так F7 - уже в наличии. А потом Ф4 в любом случае лучше АПМ. А там и еще новое железо подтянется.
С f7 вообще все плохо. В рейсеровские пк ставят что-то вроде f722 с 512кб флеша . В них то бета флайт с трудом влезает. Шаг вперёд, два назад.
по “вестям с полей” с f7 и бетафляй и инав глючит, что то в прошивках накосячено
По вестям с полей Ф7 активно фигурирует в беседах разработчиков Ардупайлота. Причем, как очень активно поддерживаемый.
mackay
Paul,
Mateksys replied that they are indeed working on an f7 version of the F405-Wing board and a GPS/compass module to go with it.
We support a number of the f7 Pixhawk family of boards like the Pixhack V52 and I hear Hex has one or two new Cubes coming with the F7 in it. I think Holybro’s KakuteF7 is also supported now although we don’t seem to have a flight controller page for it.
так f7 это семейство а не один проц варьируется размер флеша и опреативки, в чип с 512 флеша ардупилот не впихнешь, а все самые мелкие платы типа омнибуса ф7 именно с такими процами
www.st.com/en/…/stm32f7-series.html?querycriteria=… смотрим flash size
Про омнибус речь не шла. Есть платы с 1мб. Видимо в Ф7 не больше памяти, чем в Ф4, но это пока никого не останавливает.
…единственное что расстроило - при 0 спутников и ФС, он продолжает лететь прямо, а не кружить, как мы однажды обсуждали. И это совсем неправильно. Может есть настройки?
По логике АП это возможно. Такое поведение будет, если ФС настиг Вас в одном из автоматических режимов при значении параметра FS_SHORT_ACTN=0.
Он, кстати, как и FS_LONG_ACTN, по умолчанию установлен в нуль.
Вот описание этих параметров
ardupilot.org/…/apms-failsafe-function.html#plane-…
…
Short failsafe action (Plane:FS_SHORT_ACTN)
The action to take on a short (FS_SHORT_TIMEOUT seconds) failsafe event in AUTO, GUIDED or LOITER modes. A short failsafe event in stabilization modes will always cause a change to CIRCLE mode. In AUTO mode you can choose whether it will RTL (ReturnToLaunch) or continue with the mission. If FS_SHORT_ACTN is 0 then it will continue with the mission, if it is 1 then it will enter CIRCLE mode, and then enter RTL if the failsafe condition persists for FS_LONG_TIMEOUT seconds.
VALUE MEANING
0 Continue
1 Circle/ReturnToLaunch
Тут нужно рассматривать два случая - первый, это когда ФС включается с пульта, либо приемником - тогда самолет переходит в РТЛ, но при отсутствии спутников - просто продолжает лететь прямо. И я уверен, что никогда Сёркл уже не включится в этом случае.
Второй - это тот который вы описываете. Но тут мы все равно опять приходим к первому варианту, если в результате все настроено правильно, и включился РТЛ, а спутники выключились - никакого Сёркла тоже не будет. Во всяком случае об этом нигде не написано.
Поэтому, на основании чего Алексей утверждает, что включится Сёркл - мне не ясно.
Еще раздражает, что в документации нет никакого объяснения это один и тот же РТЛ, который включается как полетный режим, и который включается автопилотом по уровню газа, или разные.
файлсэйф шорт и лонг вместе работают так
например летишь и отказало радио ненадолго, пока срабатывает шорт видишь на осд надпись CIRC но как только сигнал восстановился режим снова вернется к предыдущему режиму.
если сработал лонг с RTL то при возврате связи нужно будет переключить режим туда-сюда чтобы восстановить прежний режим.
для дальних полетов в авторежиме можно настроить чтобы тротл фаилсэв не включался при потере связи если выбран один из авто режимов (авто или гайдед)
…и включился РТЛ, а спутники выключились - никакого Сёркла тоже не будет. Во всяком случае об этом нигде не написано.
Поэтому, на основании чего Алексей утверждает, что включится Сёркл - мне не ясно.Еще раздражает, что в документации нет никакого объяснения это один и тот же РТЛ, который включается как полетный режим, и который включается автопилотом по уровню газа, или разные.
Рискну предположить, что обработчик FS-события один и тот же, универсальный. Ну просто это логично с точки зрения программирования и экономии памяти программ. Характер обработки меняется в зависимости от условий возникновения ивента и значения переменных.
Так как ФС двухфазный (short и long), РТЛ включается не сразу. При некоторых условиях он может вообще не включиться.
Но если режим РТЛ активировался и тут пропали спутники, лететь уже просто некуда. Обязан запуститься режим посадки (коптер). Для самолета это, скорее всего, Circle.
Может это и глюк, или до возврата дело не доходит, и миссия продолжается…😃
Ну вот в моих тестах Серкал не включился при пропадании спутников. Возможно потому, что я включал РТЛ, когда спутников уже не было. Но как вы говорите, если логика одна - то какая разница когда они пропали. Из чего я делаю вывод, что либо логика не одна. Либо включение Серкал, не происходит при пропадании спутников.
Нужно код смотреть, а не гадать, конечно. Жаль, я не умею.
вот код самоля 3.4
обработка события короткого фаилсэйва
github.com/ArduPilot/ardupilot/blob/…/events.cpp#L…
но есть нюанс
из ртл циркл не включится
github.com/ArduPilot/ardupilot/blob/…/events.cpp#L…
если конечно не найдется еще какой нибудь кусок исключающий эту ветку и обрабатывающий иначе
Короткий ФС нам не особо интересен, а интересен сам режим РТЛ. Т.е. мы летим уже в РТЛ, и вдруг пропали спутники. Там есть в коде проверка на это, и включение Серкал?
Боролся сегодня с датчиком воздушной скорости. Аналоговый, АПМ 2.8.
Сделал префлайт калибрэйшен. Поставил Автокалк. Ратио был равн 1. Полетал, приземлился. В полете показания вызывали сомнения. Рэйтио после посадки всё равно 1.
Поставил Рэйтио вручную 2. Полетал, показания вроде адекватные. Приземлился, в Мишен планере обнаружил, что рэйтио опять сбросился в 1.
Что делать? Вручную подбирать Рэйтио?
Странное поведение датчика. У меня все оке было. Единственное на что обратил внимание колибровкой надо заниматься в тихую погоду. И почему было около 1? Там по умолчанию около 2 стоит. И что значит сбросился? Если поставили, то он не сбрасывается! Но ставить надо когда контроллер в арминге находится. Т е не просто сервами щевелит, но может и двигатель запускать. У меня , кстати, пока полный арминг не сделал - так же скидывалось все на старые значения. Т е если не заармин, то просто менять это значение не дает. И также отключать надо как только посадки и тут же ставить 0 там. Что бы он дальше не пересчитывал его.
И у меня APM 2,8 лучше показывал Air Speed чем PX 4. Хотя мне может так кажется. Надо еще откалибровать. Калибровал там погода мерзкая была просто…