Автопилот Arduplane - открытое ПО

Озвучка вариометра включается на экране телеметрии - не скрипта, а именно телеметрии в профиле модели. Требуется “понятная опентх” вертикальная скорость в составе данных, приходящих по телеметрии.
Озвучка вариометра включается на экране телеметрии - не скрипта, а именно телеметрии в профиле модели. Требуется “понятная опентх” вертикальная скорость в составе данных, приходящих по телеметрии.
Эта озвучка работает у Вас? Как это сделать объясните подробнее, очень нужно сейчас чтобы не брать в поле компьютер.
Я думаю затем что должна быть элементарная грамотность.
Ардупилот никак не может заработать на Таранисе.
+1 а еще с криками ура… эгегей… наконец-то!!! накогда такого не было и вот опять!!! )))
Для соединения с портом Sport приёмника R9 изготовил инвертор (адаптер) на транзисторах BC547 , для получения уровней сигналов на Rx Tx 3,3 В применил линейный регулятор LOW DROPOUT VOLTAGE REGULATORS LM2950 3,3 V.
оставлю это здесь… катинка из вашей же приведенной ссылки… а вы подумайте, насколько корректно подобные преобразователи называть инверторами, адаптерами и так далее… вы меня извините конечно… ничего личного, я и видео ваши смотрю, и лайки иногда ставлю. но в профильных сообществах принято разговаривать на общепонятных технически грамотных языках… и раз уж такое мое “мнение чего-то стоит” вопрос для вас, то “для чего весь этот цирк” в который превращается данная дискуссия…
+1 а еще с криками ура… эгегей… наконец-то!!! накогда такого не было и вот опять!!! )))
оставлю это здесь… катинка из вашей же приведенной ссылки… а вы подумайте, насколько корректно подобные преобразователи называть инверторами, адаптерами и так далее… вы меня извините конечно… ничего личного, я и видео ваши смотрю, и лайки иногда ставлю. но в профильных сообществах принято разговаривать на общепонятных технически грамотных языках… и раз уж такое мое “мнение чего-то стоит” вопрос для вас, то “для чего весь этот цирк” в который превращается данная дискуссия…
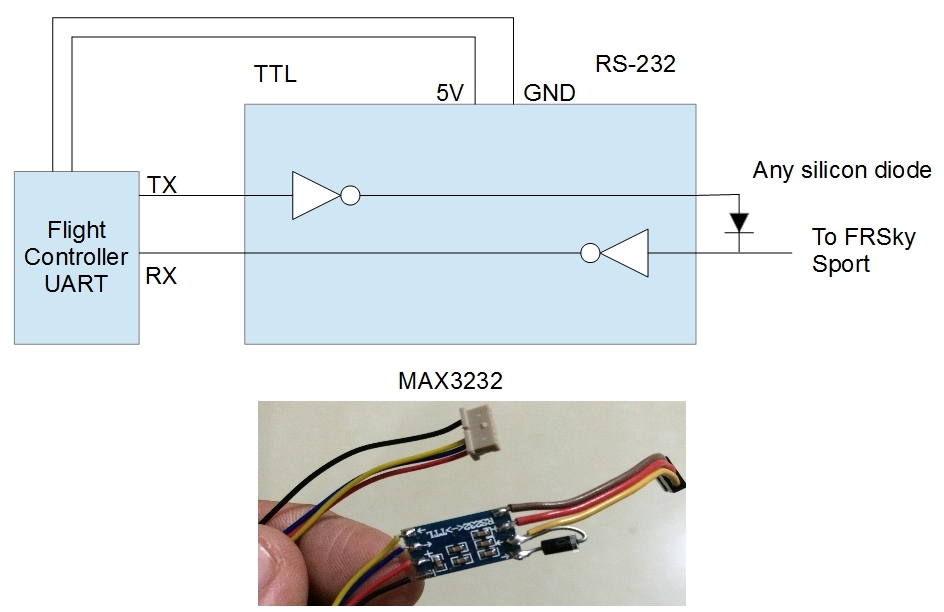
Инвертированный сигнал это из понятия FrSKY они так обозвали сигнал с S-Port, то что Вы показали схему на MAX3232 это я даже рассматривать не стал так как там уровни сигналов стандарта RS232 это совсемь не годится. Можно даже не паять ничего так как телеметрия идёт вк передатчику, потому что с перелатчика не идёт никакой информации, т.е. нет возможности менять какие-либо параметры. О понятиях договариваются, для некоторых понятий существуют стандарты - их надо соблюдать, а Гра́мотность — степень владения человеком навыками чтения и письма на родном языке. Традиционно под словом «грамотный» подразумевают человека, умеющего читать и писать, или только читать на каком-либо языке.
А как объяснить правильность понятий производителям aliexpress.ru/item/32956111865.html?spm=a2g0o.prod…_ и этому форуму discuss.ardupilot.org/t/…/27613
В приведённой ссылке на инвертор с Али там установлена микросхема 74HC04 - Hex inverter или SN 74LVC2GU04 device contains two inverters
Александр, в любом случае все мы рады что у вас наконец-то -
Ура, сработало! Теперь Ардупилот заработал на Таранисе.
Как это сделать объясните подробнее
Открыть в аппе “страничку” телеметрии в профиле модели и почитать надписи - там нагляднее табуретки.
ХЗ к чему стремится на логах. На коптерах вроде все понятно было. А тут крыло…
А к чему вы стремились в логах для коптера? Закон работы ПИД никто не менял.
Александр, в любом случае все мы рады что у вас наконец-то -
У меня сразу всё заработало, потому что изучил форум разработчика, мануал по установке скрипта, а моя радость связана с продвижением нашего любимого Ардупилота, которого я продвигаю в среду энтузиастов и начинающих. Савьте лайк под моё видео, чтобы нас ардупилотчиков стало больше.
Открыть в аппе “страничку” телеметрии в профиле модели и почитать надписи - там нагляднее табуретки.
Спасибо за направление, начал изучать.
А к чему вы стремились в логах для коптера? Закон работы ПИД никто не менял.
чтобы droll максимально повторял roll, и аналогично dpitch - pitch. И на коптере это получалось. Тут же сильный рассинхрон. Поэтому и хотелось бы понимать насколько оно вообще возможно. Ибо самолет как мне кажется более сложно стабилизировать и графики должны быть менее красивые чем на коптере. Вопрос только насколько
Открыть в аппе “страничку” телеметрии в профиле модели и почитать надписи - там нагляднее табуретки.
Одной “странички” Telemetry не достаточно нужно ещё добавить страничку Special Function и заработало. Там можно диапазоны срабатывания тона установить, ну очень удобная функция, а говорили что ардупилот на передатчике не работает, да он у меня на антенном треккере работает. Спасибо за подсказку.
чтобы droll максимально повторял roll, и аналогично dpitch - pitch. И на коптере это получалось. Тут же сильный рассинхрон. Поэтому и хотелось бы понимать насколько оно вообще возможно. Ибо самолет как мне кажется более сложно стабилизировать и графики должны быть менее красивые чем на коптере. Вопрос только насколько
Тоже пытаюсь полностью понять анализ логов для крыла, думаю вся сложность в механической части - это серво, тяги, рули управления. Все это накладывает отличие от квада, я так думаю.
Одной “странички” Telemetry не достаточно нужно ещё добавить страничку Special Function и заработало.
Вариометр работает безо всяких SF.
Там можно диапазоны срабатывания тона установить,
Это дополнительный функционал, который совершенно необязателен.
а говорили что ардупилот на передатчике не работает
Совершенно верно говорили - ардупилот работает исключительно на полётниках, а на передатчике работает OpenTX.
да он у меня на антенном треккере работает.
Попробуйте запустить его на микроволновке и торшере - вдруг и там заработает?
Свершилось! Ardupilot работает на Frsky R9M!
Вообщем кто не знает есть замечательная прога
github.com/…/android-taranis-smartport-telemetry
один косяк - не работала телеметрия ardupilot в нем. Поддерживался только Inav\betaflight. Так как я бомжеобладатель 9XR, хотелось иметь телеметрию в аппе для поиска модели. Несколько дней кодинга и все работает
github.com/…/android-taranis-smartport-telemetry
надесь скоро будет в основном проекте. Сегодня отлетал две батки на дарте. Все работает как часы.
хотелось иметь телеметрию в аппе для поиска модели
Сурово! А в 9XR у вас родная прошивка, не OpenTX?
Я Telemetry Viewer использую сугубо как “синхрокарту” при полётах на дальняк - по ней удобнее ориетироваться, чем по FPV-картинке и лимбу “компаса” на OSD.
надесь скоро будет в основном проекте.
Респектище за проделанную работу!
Сурово! А в 9XR у вас родная прошивка, не OpenTX?
OpenTX (актуальной) нету для 9XR (старой на атмеле, не PRO которая клон тараниса). Очень облегчает поиск самоля в траве. Дарт250 очень мелкий. В траве не увидишь пока вплотную не подойдешь. А пищалка родная от пиксрейсера еле пищит.
Зато сейчас по смарту выходишь прямо на него с первого раза. Ну разумеется если затупил и не посадил его рядом с собой )) Сегодня пока пиды тюнил так раза 4 случилось. Один раз вообще задизармил в полете) Кирпичей конечно отложил прилично, но дарт приятно спланировал 😃
PS: APK если кому надо попробовать:
1drv.ms/u/s!AuFPVI_eDaZbhMcAdVa9Iqnq196Mgg?e=79oX1…
не работала телеметрия ardupilot
И всё-же: нет никакой телеметрии ardupilot. Есть телеметрия в формате mavlink которая передаётся ПК под управлением ardupilot.
И всё-же: нет никакой телеметрии ardupilot. Есть телеметрия в формате mavlink которая передаётся ПК под управлением ardupilot.
И все же Алексей использует вовсе не mavlink, а FrSky SPort Passthrough - это совсем другой протокол 😃
Вариометр работает безо всяких SF.
Это дополнительный функционал, который совершенно необязателен.
Совершенно верно говорили - ардупилот работает исключительно на полётниках, а на передатчике работает OpenTX.
Попробуйте запустить его на микроволновке и торшере - вдруг и там заработает?
Сколько существует тема а что есть Ардупилот не все понимают. Вы можете иметь своё понимание, однако есть официальное определение : Платформа для управления беспилотными летательными аппаратами, мультикоптерами, самолетами с неподвижным крылом, стандартными вертолетами и самоходными аппаратами. ArduPilot (включая Copter, Plane, Rover, Sub и AntennaTracker) и наземное программное обеспечение управления (включая Mission Planner, APM Planner2 и MAVProxy) являются свободными программами: вы можете перераспределить его и/или изменить его в соответствии с условиями общей публичной лицензионной версии GNU 3, опубликованной Free Software Foundation. На устройствах может работать платформа Ардупилот если разработчики обеспечили его поддержку. Покажите пожалуйста как у Вас работает озвучка вариометра без переключателя, я здесь просил ромощи в этом вопросе, а оказалось Вы специалист и скромно промолчали. Я в ответ вышлю Вам своё видео как у меня работает с переключателем, потому что этот звук может мешать и включается по необходимости
Так и работает, если включить ее на экране телеметрии, не понимаю ваших проблем с этим. Вы не просили отключаемый вариометр, вы спрашивали как его вообще включить - я ответил где смотреть. То, что вам нужна еще и отключалка - ваше дело, но вариометр и без нее прекрасно работает.
Равно как и не понимаю:
- как же все-таки ваша “мегауниверсальная платформа” умудряется работать “на таранисе”? Разработчики Open TX не в курсе, что ардупилот их с табуретки выпихивает 😃
- зачем постить такие пространные банальности ни о чем? Создаётся впечатление, что вы плохо понимаете о чем идет речь, но “аргументируете” копипастами “близких по звучанию” абзацев.
Так и работает, если включить ее на экране телеметрии, не понимаю ваших проблем с этим. Вы не просили отключаемый вариометр, вы спрашивали как его вообще включить - я ответил где смотреть. То, что вам нужна еще и отключалка - ваше дело, но вариометр и без нее прекрасно работает.
Равно как и не понимаю:
- как же все-таки ваша “мегауниверсальная платформа” умудряется работать “на таранисе”? Разработчики Open TX не в курсе, что ардупилот их с табуретки выпихивает 😃
- зачем постить такие пространные банальности ни о чем? Создаётся впечатление, что вы плохо понимаете о чем идет речь, но “аргументируете” копипастами “близких по звучанию” абзацев.
Да я конкретно просил включить конкретно озвучку вариометра, в телеметрии он есть и на странице Telemetry можно выбрать либо постоянный тон либо тихий, но при этом звука нет потому что нет условия - назначить переключатель. Ну ладно с этим теперь Вы знаете как это сделать от меня. В остальном сообщаю дальше можете не читать это для всех: ArduPilot Configuration
The two main wiring configurations are
ArduPilot sends native frsky passthrough telemetry data
The flight controller is configured to send native frsky passthrough telemetry data either with an inverting cable or without (pixracer). To enable this feature the SERIALn_PROTOCOL of the uart connected to the receiver has to be set to 10, check the ardupilot wiki for details.
This configuration requires a “special” cable that acts as logic level converter and inverter, an example of such a cable is here
For the pixracer an inverting cable is not needed but the wiring requires that the TX and RX pin of the frs port be connected together, check this image for further details.
ArduPilot sends mavlink telemetry data
The flight controller is configured to send mavlink messages and an external board (Teensy, Blue Pill,etc) is used to convert mavlink to frsky using Eric Stockenstrom MavlinkToPassthru firmware.
This is the default configuration for long range systems (Dragonlink, TBS Crossfire, ULRS to name a few) unable to carry native frsky telemetry but compatible with mavlink.
If using a convertor (Mavlink to Frsky Passthrough) that is actually another project. github.com/zs6buj/MavlinkToPassthru/wiki
github.com/zs6buj/MavlinkToPassthru/wiki
MAVLink or Micro Air Vehicle Link is a protocol for communicating with small unmanned vehicle. It is designed as a header-only message marshaling library. MAVLink was first released early 2009[1] by Lorenz Meier under LGPL license
На мой вопрос о перспективах настройки параметров через передатчик получил ответ:
Двунаправленная телеметрия находится на ранней стадии, она работает, но еще не в мастер, и не должна быть проверена на конечных пользователей.
Прямо сейчас было бы невозможно включить его в виджет в любом случае, потому что виджеты в текущем выпуске OpenTX (2.3.8) не получают уведомления о событиях кнопки, когда эти события будут availbale для полного экрана виджеты (планируется функция в OpenTX) Я мог бы добавить функциональность на мой виджет
В протоколе управления моделями у тараниса нет ни “телеметрии снизу вверх” вообще ни мавлинка в частности. Правда, есть возможность передавать по протоколам sbus и fport некоторые сообщения от lua-скрипта, которые уже несколько лет используются в прошивке betaflight для настройки некоторых параметров полетника (пиды, рейты, фильтры, частота и мощность передатчика) “с экрана аппы”. Но прикол в том, что для этого требуется соответствующая поддержка со стороны прошивки полетника, а вовсе не опенТХ - так что ждёте вы совсем не тех. При этом ардупилот так мееееееедленно добавляааааает поддержку нового, что в ближайшие годы я бы вашей “сбычи мечт” не ждал. 😁
А вот в iNAV такое вполне может быстро появиться, если Спихальский не отвлечёт команду разработчиков на очередную малонужную ерунду.