Автопилот Arduplane - открытое ПО

Скорость у нас по дефолту 57600, иногда снижали до 38400, но ничего не выиграли с этим.
Это скорость UART, а есть еще AirSpeed, и именно ее надо снижать.
Это скорость UART, а есть еще AirSpeed, и именно ее надо снижать.
ясно, ну мы не заморачивались больше особо, т.к. эффект с направленной антенной нас полностью устроил.
Все нормально откалибровано и настроено. Самолет сам возвращается домой в режиме RTL, летает по маршруту в AUTO режиме. Все нормально работает, но только после ручного старта. А вот почему авто взлет работает через раз, я понять не могу. Может я что-то в планере не так делаю, может точку не так указываю. Может там какие-нибудь настройки перед стартом сбрасывать надо.
Перед стартом, в поле, еще раз подключаю самолет к ноуту и проверяю маршрут и настройки. Ноут у меня все равно видеорегистратором работает.
а в мануле его не кренит?
так, управление подвесом еще та затея…
включил стабилизацию, проверил вроде что-то удерживает, запустил в поле, а камера постоянно смотрит на север, как бы её на курс вывести?
пошел от супротивного и выключил Stabalise Pan, подвес повернулся по курсу и удерживает его 
Доброе всем время суток. Помогите пожалуйста разобраться новичку. У меня через раз получается авто взлёт. Я включаю режим auto, автоматически включается двигатель и я кидаю свой skyhunter по направлению ко второй точке. Или он улетает по маршруту, или заваливается на левое крыло и падает. Тяги двигателя хватает избытком. В первой точке я указываю takeoff, высоту и угол набора высоты 25. Точка home и первая точка должны быть разными или после того, как APM поймал спутники, home становится автоматически первой точкой? Радиомодема у меня пока нет. Всем большое спасибо за ответ!
Была такая проблема, вылечилось нормальной калибровкой магнитометра. Автовзлет без него нормально работать не будет.
Была такая проблема, вылечилось нормальной калибровкой магнитометра. Автовзлет без него нормально работать не будет.
Калибровал несколько раз магнитометр дома. Попробую откалибровать магнитометр в поле. Я заметил такую вещь, что когда нос самолета направлен допустим на юг, а в планере показывается, что нос самолета направлен на восток.
а в мануле его не кренит?
Нет, не кренит летит ровно.
вчера не спалось… сидел читал( пейджер) логи…много думал…вот все таки, что за хрень такая “nav roll” и " nav pitch" и чем они отличаются от просто “pitch” и “roll”. Сначала думал , что эти параметры передают положение по крену и тангажу, подключил Мишку помахал самолем - нетушки практически идеальные прямые…теряюсь в догадках…
…теряюсь в догадках…
суть ардуплане раскладывается на две составляющие
“стабилизация” - достижение требуемого угла за счет действий рулями
“навигация” - расчет требуемых углов в авторежимах для следования требуемому маршруту
просто “pitch” это фактический
" nav pitch" это расчетный в авторежиме
Калибровал несколько раз магнитометр дома. Попробую откалибровать магнитометр в поле.
Калибровать надо на открытом пространстве и подальше от металлических предметов.
суть ардуплане раскладывается на две составляющие
“стабилизация” - достижение требуемого угла за счет действий рулями
“навигация” - расчет требуемых углов в авторежимах для следования требуемому маршруту
просто “pitch” это фактический
" nav pitch" это расчетный в авторежиме
мало того, эти параметры очень полезны при тюнинге самолета, применение данных параметров описано тут
просто “pitch” это фактический
тоесть “pitch"это фактическое отклонение самолета от горизонта или величина отклонения руля высоты для достижения горизонтального положения? Ну и
следовательно в мануале “pitch” не расчитывается и график получается ровный? А " nav pitch” показывает насколько самоль отклонился от курсовой линии (пусть он при этом и летит в горизонте) и расчитывается только в автоматических режимах а в стабе и мануале данный параметр “нулевой”?
следовательно в мануале “pitch” не расчитывается и график получается ровный? А " nav pitch" показывает насколько самоль отклонился от курсовой линии (пусть он при этом и летит в горизонте) и расчитывается только в автоматических режимах а в стабе и мануале данный параметр “нулевой”?
pitch и roll фактические углы тангажа и крена САМОЛЕТА, nav pitch и nav roll,- требуемые, которые задает самолю навигационный контролер (Козин уже это говорил).
при полетах в мануале nav параметры предполагаю что будет прямая (не проверял), а в полете на авто режимах pitch и roll должны максимально повторять параметры nav pitch и nav roll. по логу делаем анализ соотвесвия этих параметров друг другу, если есть явные несоответсвия- это признак что требуется дополнительная настройка. Либо пид, либо смещенияе цт, или тримирование, смотря какое расхождение и где
например у меня была проблема что самоль на скоростном снижении (пикировании), не достигал желаемой скорости. анализ этих графиков показал что на самых на нижних участках графика pitch, не дотягивает до желаний контролера nav pitch. то есть самоль просто не может войти в столь крутое пике как ему хочет дать контроллер. вылечил смещением хвостового стабилизатора и небольшой коррекцией цт.
А как залить нужную мне прошивку на комп (НЕХ), что бы залить её потом без интернета?
Захожу в прошивки
А их там тьма, и какие под мою плату и какая версия прошивок не знаю.
(имею ввиду не только последнею а к примеру 3.2.2)
И попутный вопрос, что означает AR2.4.7 AP 3.2.2 AC 3.2.1 ?

что означает AR2.4.7 AP 3.2.2 AC 3.2.1 ?
AR- для автомобилей, AC- ардукоптер; AP - ардупланер. Выбираете на страничке картинку планера, и МП сообразит что вам нужна AP версия
А их там тьма, и какие под мою плату и какая версия прошивок не знаю.
Шаритесь по папочкам, (можете выбрать посвежее) ищите те в которых есть подпапочка APM2. Заходите туда , там будет два файла hex- он то вам и нужен, и tex. И если вы не экстримал то проверяете в текстовом файле (там содержится номер версии прошивки) не бетта ли это версия. если это бетта то отступаете назад ориентируясь на даты. Хотя то еще занятие искать, в папке stable лежит последняя проверенная версия.
Только не уверен, что вам не понадобится еще какая то програмулина чтобы этот hex залить в контроллер типа IDE Arduino. Не пробовал в МП открывать hex. хотя теоретически должно получиться люди как то даже кастомные прошивки заливают.
люди как то даже кастомные прошивки заливают
Что значит как то? Через МР всю жизнь прошивки и заливаем. А вы Василий через что обновляетесь?
Через МР всю жизнь прошивки и заливаем
Я тоже через МП, но выбираю прошивку из списка предложенного МП, а hex в чистом виде не помню как заливать.
Я тоже через МП, но выбираю прошивку из списка предложенного МП, а hex в чистом виде не помню как заливать.
А разве эта кнопка не даёт залить НЕХ ?

Прекрасно даёт 😃
Добрый день.
Столкнулся со странным.
Новое ЛК и новый АПМ. В АПМ залит арду-плейн (последняя версия с консолью) и сброшены настройки командой RESET
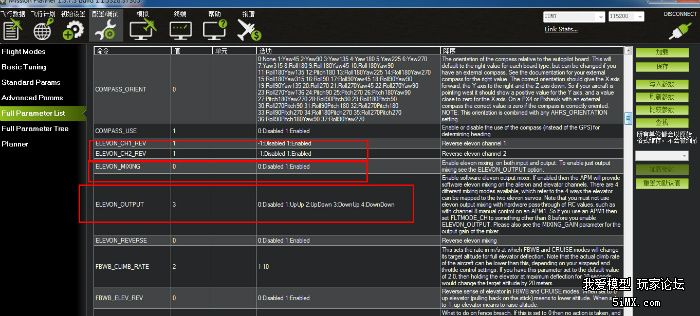
далее в разделе калибровки радио АПМ настроен на управление элевонами. Во всех режимах кроме “мануал” ЛК управляется как ЛК, элевоны работают. а в мануале же 1 и 2 канал не микшируются и работают раздельно.
Повторный сброс настроек не помогает.
В чём может быть беда?
в мануале же 1 и 2 канал не микшируются и работают раздельно
ELEVON_MIXING - 0
ELEVON_OUTPUT - 1, 2, 3, 4 в зависимости от кинематики серво-элевон (у меня 2).
Никто не сталкивался с такой проблемой:
внезапно уплывает горизонт. Причем за секунду по ролу/пинчу он на 40+ градусов уплывает. При полете в стабилайзе самолет пытается выправить несуществующий крен и падает. А на земле элероны/руль высоты ходят волнами, вверх-вниз. Причем начинается не сразу, до этого можно спокойно минут 5-10 летать.
Апм 2.6, прошивка 3.2.3, гпс в наличии, компас отключен.
Вибраций по ролу/пинчу практически нет, по yaw от -8 до -12 в среднем
Причем до сегодняшнего дня такой проблемы не было, самолет стабильно летал по 10 км.
Носитель бикслер