Автопилот Arduplane - открытое ПО

То что мне попадались gps - либо уже шли с последней прошивкой, либо их нельзя было прошить из-за косяков со стороны китайцев. И вроде как ардупилот может сам конфигурировать gps при старте. Так что можно в самом арду поковырятся.
Даже ковыряться необязательно, тот конфиг, что заливает ardupilot при каждом включении вполне вменяемый.
Прошивку обновлять в М8Н тоже смысла нет.
Короче, со всех сторон засада. )))))
Короче, со всех сторон засада. )))))
Да я и подключиться через МП не смог… 😃
А в чём сложность подключиться через юсб-юарт?
А в чём сложность подключиться через юсб-юарт?
Снимать, разбирать, другой разьём, и.т.д и.т.п.
А в чём сложность подключиться через юсб-юарт?
Лень - двигатель прогресса.
Лень - двигатель прогресса.
Это точно.
Параметр GPS_NAVFILTER у кого какой стоит? По умолчанию 8. Но по описанию, для самолёта вполне подходит и 7. Однозначного ответа в гугле не нашёл.
все дефолт стоит. Имхо не нужно ничего менять если стандартный аппарат
Единственное что заметил, на айнаве конфиг лучше, чем на арду загружает в gps. И спутники быстрее ловятся и количество спутников на айнаве больше.
А так по умолчанию нормально с gps летают пепелацы.
Подскажите, тут на картинке GPS идёт в гребенку где контакты под сервы
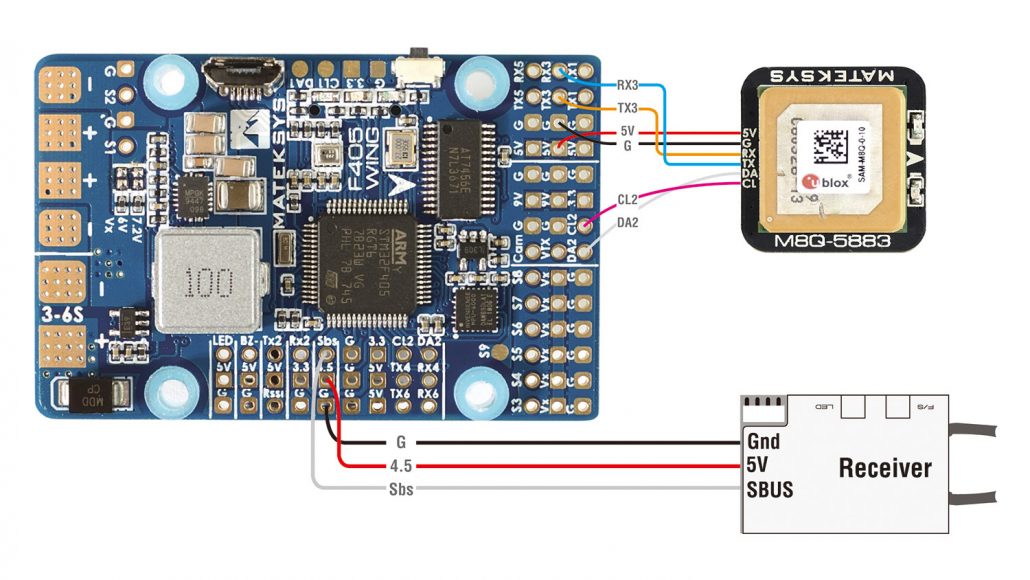
Но под Айнав паяется в гребенку рядом с приёмником.
При этом в параметрах есть такой выбор:
Default UART order
- SERIAL3 = GPS1 = USART3
- SERIAL4 = GPS2 = UART4
Так можно GPS с Арду паять на TX/RX 4 рядом с приёмником?
И ещё, если ставлю не Айнав а Арду, то не смогу с пульта управлять видеопередатчиком по Трампу/Смараудио?
Но под Айнав паяется в гребенку рядом с приёмником.
Чего?
При этом в параметрах есть такой выбор:
Default UART orderSERIAL3 = GPS1 = USART3
SERIAL4 = GPS2 = UART4
Так можно GPS с Арду паять на TX/RX 4 рядом с приёмником?
Какая разница к какому UART паять gps? В настройках арду поменяете
Если у вас sbus, то приемник лучше паять к sbus на полетнике, другие к Rx2 или согласно картинке.
GPS можно паять на любой uart, желательно кроме uart2
По умолчанию арду настроен как написано на сайте матека, но вам никто не мешает подключать как вам угодно и настраивать как вам нужно.
И ещё, если ставлю не Айнав а Арду, то не смогу с пульта управлять видеопередатчиком по Трампу/Смараудио?
В релизных версиях пока нету поддержки трампа/смартаудио, если не путаю, но вроде как должны когда-то добавить
Если у вас sbus, то приемник лучше паять к sbus на полетнике, другие к Rx2 или согласно картинке.
Вот тут не путайте с iNAV. Sbus надо паять только туда, куда указано в документации арду (не производителя!) для этого полётника, так как арду использует программный детектор-декодер сигнала с приёмника, а режим “ручного управления пином” не на всяком uart работает. Порой Sbus паяется в экзотические места типа LED-пина.
В релизных версиях пока нету поддержки трампа/смартаудио, если не путаю, но вроде как должны когда-то добавить
Она будет только с помощью LUA-скриптов на полётниике (не на аппе), а те, в свою очередь, будут поддерживаться только полётниками с 2Мб флешем, так что F4 в пролёте.
Чего?
на фото с распиновкой пайки для Арду TX и RX GPS показаны паяться на 3й
На Айнаве паяется на 4й
Но тут видно, что для Арду вроде можно тоже паяться на 4й
Default UART order
SERIAL3 = GPS1 = USART3
SERIAL4 = GPS2 = UART4
Так можно на 4й или нет? Работать будет?
на фото с распиновкой пайки для Арду TX и RX GPS показаны паяться на 3й
Показана настройка по умолчанию.
Вы можете подключиться к любому свободному, потом укажете в настройках что на этом порту у вас GPS.
Вы можете подключиться к любому свободному, потом укажете в настройках что на этом порту у вас GPS.
спасибо!!!
Протестировал ARM-DISARM в воздухе и хорошего мало! На тумблер повесил ARM-DISARM армится и дизармится без проблем, не то чтобы гемор как на INAV! Но не все так и просто! Баровысота прописывается новая, котоя была в момент DISARM-ARM!!! Мало того прописывается новая точка дома. И как вы думаете куда полетит и на какой высоте самолет в случае RTL?! Правильно, но новую точку и новую высоту дома! Это сегодня на практике и проверил. Но показания на ОСД направления и дальность до первой точки дома (которая истинная) остаются верными. Так, что будьте внимательнее с этой настройкой. Не понятно почему разрабы не предусмотрели это?
Объясните, зачем дизармить в воздухе?
Здравствуйте товарищи, у меня на HUD экране постоянно горит красным цветом надпись EKF, как я понял это какой-то фильтр Кальмана. Что нужно сделать что бы убрать эту ошибку?
Плата матек 405-wing.
Для начала поймать достаточное количество спутников.
Ловил, 7шт. И почему-то если ЖПС обнаруживает больше 6 спутников, то начинает прыгать авиагоризонт. Если меньше 6ти спутников, то горизонт ведёт себя адекватно.
Что в настройках EKF2 и EKF3?
Объясните, зачем дизармить в воздухе?
В дерево влетел на автовзлете а мотор крутится и крутится пытаясь отработать автовзлет а движок и не выключить! Пришлось лезть на дерево и снимать самоль с работающим винтом. Нужно аварийно сесть, чтоб не сработал РТЛ, включил Disarm и все в порядке движок с винтом будут целы. Можно долго объяснять, но лучше чтоб работал как нужно! А использовать или нет вопрос каждого. Я его никогда не ставил, ну а сейчас если б работал корректно, то можно было бы и оставить.
но лучше чтоб работал как нужно!
Именно так.
И поэтому в арду по умолчанию никаких тумблеров на арминг не предусмотрено.
В дерево влетел на автовзлете а мотор крутится и крутится пытаясь отработать автовзлет а движок и не выключить!
Наверное сложно переключить режим в ручной или стаб и задизармить обычным способом…
