Далеко и высоко. Тактика и практика

датчик воздушной скорости? полезен ли он при наших полетах вдаль?
Однозначно полезен. Другое дело как использовать.
Лично был свидетелем, когда пилот развернувшись домой обнаружил что скорость по ГПС равна 0, хотя бароскорость уверенно показывала 60км\час. А до дома еще километров 10 было. Ну что ж, стал плавно разгонять снижением, благо высоты набрал с 1000м. Стала расти и скорость по земле, так вот не повышая расхода электричества, только реализуя высоту и вернулся. Причем со снижением высоты ослабевал и ветер (в тот день он был довольно сильным), а пилот еще и улетел по ветру…
да, теория мне ясна… вопрос скорее тем, кто летает с датчиком воздушной скорости и вопрос про эффективность. можно же по ветру лететь с ГПС-скоростью 90 кмч, жрать 6 ампер и не падать (пример - полет Александра). была бы у него воздушная скорость - он летел бы не 90-95кмч, а 110 кмч но при этом расход был бы больше… но при этом он меньше сжог бы на путь “туда”…
Так мне кажется, многие подбирают эффективность не скоростью, а током… а там уже побаробану, по ветру/ против ветра, мотор кушает одно и тоже на заранее выбранном оптимальном режиме.
не скоростью, а током… а там уже побаробану, по ветру/ против ветра
А когда подъем или снижение ?
Так вроде спросили о роли воздушной скорости на маршруте и как по нему орентиовать еффективность…?
А что с подъёмом и спуском?
Лично у меня есть “два рабочих тока”, выведенные имперически без всяких заумных мыслей: на маршруте и подъём.
Как я себе представляю в голове, то в принципе разницы нет… что выдерживать скажем с фонаря 10 ампер, что с того же фонаря 50км/ч воздушной скорости. Несмотря ни на какой ветер, на определённой воздушной скорости аппарат будет хавать определённый ампераж. Но просто мне на амперы как то удобней смотреть, да и показания правдивей.
Всё это конечно относиться если ветер на протяжении полёта не меняет своё направлениe и посадку производим в точке старта.
в принципе разницы нет… что выдерживать скажем с фонаря 10 ампер, что с того же фонаря 50км/ч воздушной скорости
Да, если прямолинейный, горизонтальный полет, без восходящих и нисходящих потоков, то по идее без разницы.
А почему не рассматривать вариант - летим по ветру - набираем высоту - там ветер сильнее и нам выгоднее, летим против ветра - снижаемся, т.к. у земли ветер слабее. Узнать какой ветер в месте полета самолета можно имея приборы. Вот и оптимизация.
Не совсем понял почему подниматься выгоднее по ветру, но не суть…
Даже если вы и правы, то чисто с точки зрения безопасности полета, взлет и полет “туда” производят против ветра.
Не всем же повезло жить в тайге или пустыне, у кого-то рядом мегаполис, трассы большой и малой авиации - для полета дальше 3км уже надо выбирать не просто направление, а зигзагообразный коридор 😦. Находятся конечно “герои” которым на все наплевать, но это до первого громкого случая…
Выгода не в самом наборе высоты, это как бы отдельно - выгода в том, что с высотой вырастает скорость ветра. В самом простом случае так
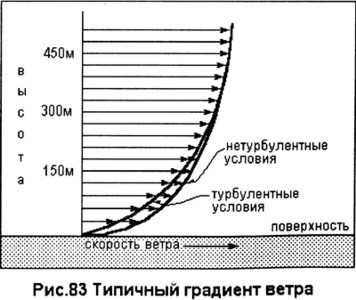
Хотя на деле может на высоте быть ветер другого направления, вот только как про это узнать…

Сегодня читал статистику рекордов полетов в высоту на разных самолетах (речь идет не о моделях), так вот в 1938г. на моторном Биплане с пропеллером поднялся на высоту 17 км. ru.wikipedia.org/wiki/Caproni_Ca.161
Так вот я задумался, может на биплане будет покорение высот будет проще или ему это удалось по каким то другим причинам. Речь идет о проблеме с разряженным воздухом.
может на биплане будет покорение высот будет проще или ему это удалось по каким то другим причинам
Однако абсолютный рекорд у планера размахом 61 метр с двумя тюненными движками от 4-ёх местной цессны.
Хотя на деле может на высоте быть ветер другого направления, вот только как про это узнать…
Как раз по этой причине недавно грохнул Х8.
На счет ветра в этой теме давали классный ресурс windru, по каторому можно посмотреть ветер по высотам.
Весь полет в ручном режиме проходил. Я при полете ориентировался по току потребляемому , когда шел туда то ток поддерживал так чтобы высота медленно росла , при этом пролетая море приходилось добавлять на 0,5-1А , так как самолет начинал просаживаться , когда влетал на сушу , особенно там где сопки , меня начинало подымать быстрее и я ток немного уменьшал до ведичины что бы сохранить незначительный подъем. Обратно шел первые 30 км над морем , устанавливая ток что бы поддерживать высоту. При этом за скоростью следил только для информации. Вышел к концу полета на расчетное суммарное потребление. ( Благодаря стабильному ветру без изменений согласно прогноза а также тестовому перед этим полетом на 30 км с тем же весом )
Вчера зашёл в чип и дип, и там целая куча ферритовых колец была, разного размера и характеристики -ххххх НМ. В итоге не купил, решил уточнить. Какое следует брать лучше для использования на видеопередатчик?
Весь полет в ручном режиме проходил.
Класс!
А ПВО над Влади-ком не беспокоило близкой шрапнелью? Или договаривались заранее?😃
del
Раз уж на коптеры высота от 1000м, принимайте в таблицу:
Дата: 5 июля 2014.
Пилот: AlexZam
Дальность при макс высоте: полёт в пределах 20 метров.
Макс высота: 1080 метров (Naza OSD переключается на километры после 1000 и округляет до 1,1 км.).
Длительность: 9 минут наверх и обратно.
Модель, размах: Гексакоптер 68см.
OSD, Автопилот: DJI Naza V2, DJI iOSD mini
Тип АКБ и емкость: 5000Ач 3S LiPo
Расход АКБ: ~3000Ач суммарно
Тип р/у: Futaba T8FG
Частота р/у: 2,4 ГГц
Мощность р/у: 100 мВт
Антенна р/у: Штырь
Приемник р/у: R6208SB
Передатчик видео: Lawmate
Частота видео: 1,2 ГГц
Мощность видео: 1 Вт
Антенна Tx видео: Штырь
Антенна Rx видео: Штырь
Приемник видео: Lawmate
Следящая система: нет
Местность: Яхрома
Погодные условия: ясно, облака выше 2км, +20C
Причина разворота: цель достигнута
Во вложении кадр из видео с Mobius.
полет на 20 км. “просвистел над лезвием ножа”.
перед полетом зарядил все летные акб и на баллансировке последнего сломался блок питания зарядника.
непосредственно перед взлетом стало понятно, что батарейки в наземке на час. ну может на 70 минут. (по плану полет должен был продлиться как раз около часа)
в полете туда при переключении с полета по точкам на круиз контроль и обратно самолет почему-то градусов на 70 начинал отклоняться от курса и приходилось возвращать его на верный курс.
при полете обратно при переключении с RTH на круиз-контроль самолет сходил с ума и почему-то вместо удержания курса летел по дуге (при чем дуга была ПРОТИВ ветра)
ну и в довершении всего во время полета запищал пульт о низкой зарядке батареи: отказала 1 из 3 банок пультовой батарейки.
но не смотря на все преграды я побывал “там”.
www.youtube.com/watch?v=2aVMIbjQmtY&feature=youtu.…
параметры полета:
Время полета 50 минут
Дата: 05.07.2014
Пилот: ayakunin
макс дальность: 20033м
высота при макс дальности: 500м
Тип л/а: классика
Модель: Multiplex Twinstar II (Взлетный вес 1708гр)
OSD, Автопилот: MyFlyDream AP
Аккумуляторы на борту: 2x4650мАч 3s
Расход АКБ: 7469мАч
Тип р/у: FrSky Taranis + Dragonlink
Частота р/у: 433Мгц
Мощность р/у: 0.5Вт
Антенна р/у: IBCrazy’s Moxon
Приемник р/у: dragonlink 12 каналов + штатный диполь
Передатчик видео: ImmersionRC
Частота видео: 5740
Мощность видео: 600мВт
Антенна Tx видео: штатная сосиска
Антенна Rx видео: патч 23дБ
Приемник видео: aomway 32ch
Следящая система: MyFlyDream AAT
Местность: село Страхово, Заокский район, Тульская область
Погодные условия: на земле +22-24, ясно, ветер “в эшелоне” около 4 м/с
Причина разворота: цель достигнута
О как - на 5.8 это рекорд на нашем форуме (если не ошибаюсь). Поздравляю!
Александр, а можно фото компоновки? Сейчас как раз собираю такой самолет. Особенно интересует расположение аккумов и что усиливали.
Заранее спасибо.
О как - на 5.8 это рекорд на нашем форуме (если не ошибаюсь). Поздравляю!
Александр, а можно фото компоновки? Сейчас как раз собираю такой самолет. Особенно интересует расположение аккумов и что усиливали.
Заранее спасибо.
20 км для моего сетапа - это как говорят на бирже “линия сопротивления”
по управлению RSSI 17% в точке максимального удаления
по видео - тоже для меня уже предел
и по батарейке тоже…
нужно модернизировать всё указанное, чтоб лететь на 30 км. я уверен, твинчик на 30 слетать сможет!
фотки ниже.
видео антенна выступает за габарит самолета, перед взлетом я ее раскладываю, а при посадке она складывается. сделал так, чтоб ничто ее не экранировало.
внутрь дополнительно поместил бек 12В 4.5А, т.к. без него были сильные помехи на видео от регулей
на приеме управления - диполь на киле. нижняя часть на РН, верхняя - в трубочке от сока торчит вверх
для полета на 20 км использовал 2 батарейки в параллель, 1 в штатном месте, вторая ровно на ЦТ сверху на крыле около ГПС антенны. ее посадил на липучку и дополнительно прихватил скотчем
но никаких дополнительных усилений пенопласта не делал, самолет и так крепкий
собирал точно по инструкции, но вес экономил на всем: почти все соединения неразборные (пайка вместо разъемов), даже сервы поставил 9-граммовые металлические вместо требуемых 22-граммовых.
…newmailru.users.photofile.ru/…/217380669.jpg
…newmailru.users.photofile.ru/…/217380671.jpg
…newmailru.users.photofile.ru/…/217380675.jpg
…newmailru.users.photofile.ru/…/217380667.jpg
Раз уж на коптеры высота от 1000м, принимайте в таблицу:
Дата: 5 июля 2014.
Пилот: AlexZam
Дальность при макс высоте: полёт в пределах 20 метров.
Макс высота: 1080 метров (Naza OSD переключается на километры после 1000 и округляет до 1,1 км.).
Длительность: 9 минут наверх и обратно.
Модель, размах: Гексакоптер 68см.
OSD, Автопилот: DJI Naza V2, DJI iOSD mini
Тип АКБ и емкость: 5000Ач 3S LiPoРасход АКБ: ~3000Ач суммарно
Тип р/у: Futaba T8FG
Частота р/у: 2,4 ГГц
Мощность р/у: 100 мВт
Антенна р/у: Штырь
Приемник р/у: R6208SB
Передатчик видео: Lawmate
Частота видео: 1,2 ГГц
Мощность видео: 1 Вт
Антенна Tx видео: Штырь
Антенна Rx видео: Штырь
Приемник видео: Lawmate
Следящая система: нет
Местность: Яхрома
Погодные условия: ясно, облака выше 2км, +20C
Причина разворота: цель достигнутаГексакоптер. FPV. Высота 1,1 км.
Во вложении кадр из видео с Mobius.
Здравствуйте Алексей! Можно опытом поделиться как вам удалось видео на 1,2 ГГц с назой скрестить. У меня так и не получилось, разносил на мах расстояние, все одно спутники наза не видит.