Далеко и высоко. Тактика и практика

А почему не рассматривать вариант - летим по ветру - набираем высоту - там ветер сильнее и нам выгоднее, летим против ветра - снижаемся, т.к. у земли ветер слабее. Узнать какой ветер в месте полета самолета можно имея приборы. Вот и оптимизация.
Не совсем понял почему подниматься выгоднее по ветру, но не суть…
Даже если вы и правы, то чисто с точки зрения безопасности полета, взлет и полет “туда” производят против ветра.
Не всем же повезло жить в тайге или пустыне, у кого-то рядом мегаполис, трассы большой и малой авиации - для полета дальше 3км уже надо выбирать не просто направление, а зигзагообразный коридор 😦. Находятся конечно “герои” которым на все наплевать, но это до первого громкого случая…
Выгода не в самом наборе высоты, это как бы отдельно - выгода в том, что с высотой вырастает скорость ветра. В самом простом случае так
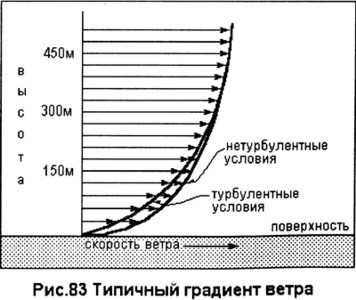
Хотя на деле может на высоте быть ветер другого направления, вот только как про это узнать…

Сегодня читал статистику рекордов полетов в высоту на разных самолетах (речь идет не о моделях), так вот в 1938г. на моторном Биплане с пропеллером поднялся на высоту 17 км. ru.wikipedia.org/wiki/Caproni_Ca.161
Так вот я задумался, может на биплане будет покорение высот будет проще или ему это удалось по каким то другим причинам. Речь идет о проблеме с разряженным воздухом.
может на биплане будет покорение высот будет проще или ему это удалось по каким то другим причинам
Однако абсолютный рекорд у планера размахом 61 метр с двумя тюненными движками от 4-ёх местной цессны.
Хотя на деле может на высоте быть ветер другого направления, вот только как про это узнать…
Как раз по этой причине недавно грохнул Х8.
На счет ветра в этой теме давали классный ресурс windru, по каторому можно посмотреть ветер по высотам.
Весь полет в ручном режиме проходил. Я при полете ориентировался по току потребляемому , когда шел туда то ток поддерживал так чтобы высота медленно росла , при этом пролетая море приходилось добавлять на 0,5-1А , так как самолет начинал просаживаться , когда влетал на сушу , особенно там где сопки , меня начинало подымать быстрее и я ток немного уменьшал до ведичины что бы сохранить незначительный подъем. Обратно шел первые 30 км над морем , устанавливая ток что бы поддерживать высоту. При этом за скоростью следил только для информации. Вышел к концу полета на расчетное суммарное потребление. ( Благодаря стабильному ветру без изменений согласно прогноза а также тестовому перед этим полетом на 30 км с тем же весом )
Вчера зашёл в чип и дип, и там целая куча ферритовых колец была, разного размера и характеристики -ххххх НМ. В итоге не купил, решил уточнить. Какое следует брать лучше для использования на видеопередатчик?
Весь полет в ручном режиме проходил.
Класс!
А ПВО над Влади-ком не беспокоило близкой шрапнелью? Или договаривались заранее?😃
del
Раз уж на коптеры высота от 1000м, принимайте в таблицу:
Дата: 5 июля 2014.
Пилот: AlexZam
Дальность при макс высоте: полёт в пределах 20 метров.
Макс высота: 1080 метров (Naza OSD переключается на километры после 1000 и округляет до 1,1 км.).
Длительность: 9 минут наверх и обратно.
Модель, размах: Гексакоптер 68см.
OSD, Автопилот: DJI Naza V2, DJI iOSD mini
Тип АКБ и емкость: 5000Ач 3S LiPo
Расход АКБ: ~3000Ач суммарно
Тип р/у: Futaba T8FG
Частота р/у: 2,4 ГГц
Мощность р/у: 100 мВт
Антенна р/у: Штырь
Приемник р/у: R6208SB
Передатчик видео: Lawmate
Частота видео: 1,2 ГГц
Мощность видео: 1 Вт
Антенна Tx видео: Штырь
Антенна Rx видео: Штырь
Приемник видео: Lawmate
Следящая система: нет
Местность: Яхрома
Погодные условия: ясно, облака выше 2км, +20C
Причина разворота: цель достигнута
Во вложении кадр из видео с Mobius.
полет на 20 км. “просвистел над лезвием ножа”.
перед полетом зарядил все летные акб и на баллансировке последнего сломался блок питания зарядника.
непосредственно перед взлетом стало понятно, что батарейки в наземке на час. ну может на 70 минут. (по плану полет должен был продлиться как раз около часа)
в полете туда при переключении с полета по точкам на круиз контроль и обратно самолет почему-то градусов на 70 начинал отклоняться от курса и приходилось возвращать его на верный курс.
при полете обратно при переключении с RTH на круиз-контроль самолет сходил с ума и почему-то вместо удержания курса летел по дуге (при чем дуга была ПРОТИВ ветра)
ну и в довершении всего во время полета запищал пульт о низкой зарядке батареи: отказала 1 из 3 банок пультовой батарейки.
но не смотря на все преграды я побывал “там”.
www.youtube.com/watch?v=2aVMIbjQmtY&feature=youtu.…
параметры полета:
Время полета 50 минут
Дата: 05.07.2014
Пилот: ayakunin
макс дальность: 20033м
высота при макс дальности: 500м
Тип л/а: классика
Модель: Multiplex Twinstar II (Взлетный вес 1708гр)
OSD, Автопилот: MyFlyDream AP
Аккумуляторы на борту: 2x4650мАч 3s
Расход АКБ: 7469мАч
Тип р/у: FrSky Taranis + Dragonlink
Частота р/у: 433Мгц
Мощность р/у: 0.5Вт
Антенна р/у: IBCrazy’s Moxon
Приемник р/у: dragonlink 12 каналов + штатный диполь
Передатчик видео: ImmersionRC
Частота видео: 5740
Мощность видео: 600мВт
Антенна Tx видео: штатная сосиска
Антенна Rx видео: патч 23дБ
Приемник видео: aomway 32ch
Следящая система: MyFlyDream AAT
Местность: село Страхово, Заокский район, Тульская область
Погодные условия: на земле +22-24, ясно, ветер “в эшелоне” около 4 м/с
Причина разворота: цель достигнута
О как - на 5.8 это рекорд на нашем форуме (если не ошибаюсь). Поздравляю!
Александр, а можно фото компоновки? Сейчас как раз собираю такой самолет. Особенно интересует расположение аккумов и что усиливали.
Заранее спасибо.
О как - на 5.8 это рекорд на нашем форуме (если не ошибаюсь). Поздравляю!
Александр, а можно фото компоновки? Сейчас как раз собираю такой самолет. Особенно интересует расположение аккумов и что усиливали.
Заранее спасибо.
20 км для моего сетапа - это как говорят на бирже “линия сопротивления”
по управлению RSSI 17% в точке максимального удаления
по видео - тоже для меня уже предел
и по батарейке тоже…
нужно модернизировать всё указанное, чтоб лететь на 30 км. я уверен, твинчик на 30 слетать сможет!
фотки ниже.
видео антенна выступает за габарит самолета, перед взлетом я ее раскладываю, а при посадке она складывается. сделал так, чтоб ничто ее не экранировало.
внутрь дополнительно поместил бек 12В 4.5А, т.к. без него были сильные помехи на видео от регулей
на приеме управления - диполь на киле. нижняя часть на РН, верхняя - в трубочке от сока торчит вверх
для полета на 20 км использовал 2 батарейки в параллель, 1 в штатном месте, вторая ровно на ЦТ сверху на крыле около ГПС антенны. ее посадил на липучку и дополнительно прихватил скотчем
но никаких дополнительных усилений пенопласта не делал, самолет и так крепкий
собирал точно по инструкции, но вес экономил на всем: почти все соединения неразборные (пайка вместо разъемов), даже сервы поставил 9-граммовые металлические вместо требуемых 22-граммовых.
…newmailru.users.photofile.ru/…/217380669.jpg
…newmailru.users.photofile.ru/…/217380671.jpg
…newmailru.users.photofile.ru/…/217380675.jpg
…newmailru.users.photofile.ru/…/217380667.jpg
Раз уж на коптеры высота от 1000м, принимайте в таблицу:
Дата: 5 июля 2014.
Пилот: AlexZam
Дальность при макс высоте: полёт в пределах 20 метров.
Макс высота: 1080 метров (Naza OSD переключается на километры после 1000 и округляет до 1,1 км.).
Длительность: 9 минут наверх и обратно.
Модель, размах: Гексакоптер 68см.
OSD, Автопилот: DJI Naza V2, DJI iOSD mini
Тип АКБ и емкость: 5000Ач 3S LiPoРасход АКБ: ~3000Ач суммарно
Тип р/у: Futaba T8FG
Частота р/у: 2,4 ГГц
Мощность р/у: 100 мВт
Антенна р/у: Штырь
Приемник р/у: R6208SB
Передатчик видео: Lawmate
Частота видео: 1,2 ГГц
Мощность видео: 1 Вт
Антенна Tx видео: Штырь
Антенна Rx видео: Штырь
Приемник видео: Lawmate
Следящая система: нет
Местность: Яхрома
Погодные условия: ясно, облака выше 2км, +20C
Причина разворота: цель достигнутаГексакоптер. FPV. Высота 1,1 км.
Во вложении кадр из видео с Mobius.
Здравствуйте Алексей! Можно опытом поделиться как вам удалось видео на 1,2 ГГц с назой скрестить. У меня так и не получилось, разносил на мах расстояние, все одно спутники наза не видит.
Здравствуйте Алексей! Можно опытом поделиться как вам удалось видео на 1,2 ГГц с назой скрестить. У меня так и не получилось, разносил на мах расстояние, все одно спутники наза не видит.
Я на выход с Lawmate сразу поставил Low Pass Filter (т.к. р\у на 2,4 Ghz).
Но при тестах без LPF я с таким не сталкивался.
Lawmate размещен в одной плоскости с Naza.
А GPS на 9 см выше, на штатной стойке.
Раз уж на коптеры высота от 1000м, принимайте в таблицу:
Принято 😃 А как видео антенны на земле и на коптере расположены?
полет на 20 км. “просвистел над лезвием ножа”.
Добавил с таблцу. Отличный результат на 5.8!
Хотел бы поделиться своим результатом «вверх» (ни на что не претендую).
Макс высота 3050 баро (3300 GPS)
Тип л/а Классика
Модель SkyWalker 1680
OSD, Автопилот MegaPirateX
Аккумуляторы на борту 4S 5000
Расход АКБ 4830 (потом на заправке батарея приняла 5000)
Тип р/у Turnigy 9x + Expert Tiny
Частота р/у 433
Мощность р/у 1 Вт
Антенна р/у Харченко
Передатчик видео BEVRC
Частота видео 1.2 ГГц
Мощность видео 0,8 Вт
Антенна Tx видео Vee диполь
Антенна Rx видео Штатные Duck-style
Приемник видео BEVRC + Lawmate (EagleTree Ground Station используется для диверсити)
Следящая система нет
Погодные условия 2-3 м/с, небольшая облачность
Причина разворота Близкий разряд АКБ
Полёт проходил в автоматическом режиме. Предварительно в командный интерпретатор автопилота был загружен скрипт автоматического подъёма. В скрипте были следующие условия прерывания подъёма: ФС, достижение высоты 3300 (по баро), падение напряжения ходовой батареи до 13.9, расход более 5000 мАч. По достижении/сработке одного из условий включается возврат. Взлёт был ручным (так удобнее), после чего включение автоматического режима. Модель галсами набирала высоту. Напряжение ходовой батареи просело до 13.9, что и стало причиной прерывания подъёма. При снижении дважды прерывал автоматический режим для съёмки панорам.
Из-за проблем с наземной писалкой осталась только часть технички на спуске. HD брелок на борту отработал как надо - от начала до конца.
Подъём планировался с учётом пролёта пассажирских судов, дополнительно контролировался по FR24 😉
Фрагмент снимка с самой высокой точки (обрезал чтобы морда не торчала):

Вертикальная, горизонтальная проекция пути, график расхода и высоты:

Момент перехода «подъём-спуск»:

Лог командного интерпретатора:
******************************************************
Megapirate X ver 2.0 build 5578
Audio started...OK
Checking hardware...OK
Read settings...OK
Gyro init: don't move!...OK
AHRS init...OK
Read SWID...UNLOCKED mode
Boot check...OK
System started
>OSD started
LED started
CLI restart
*** Скрипт Рекорд Высоты v1.3***
Точек: 2
Плечо: 1200
Цель: 3500м
Отсечка: 13.900000В
Емкость: 4500мАч
*** Ожидаю режим КРУГ ***
Подъем!
Точка 1 пройдена, 300м
Точка 2 пройдена, 933м
Точка 3 пройдена, 1469м
Точка 4 пройдена, 2152м
Точка 5 пройдена, 2809м
Села батарейка, высота 3050м
Иду на посадку
Миссия завершена
CLI restart
*** Скрипт Рекорд Высоты v1.3***
Точек: 2
Плечо: 1200
Цель: 3500м
Отсечка: 13.900000В
Емкость: 4500мАч
*** Ожидаю режим КРУГ ***
Принято 😃 А как видео антенны на земле и на коптере расположены?
На коптере штырь горизонтально.
На земле штырь тоже горизонтально, отношу его подальше от передатчика: ноут на багажнике машины, приёмник на крыше.
кто изучал вопрос сверхлегких батареек на банках GEB8043125?
вот типа таких rangevideo.com/…/315-rv-endurance-24400mah-148v-12…
в чем минусы кроме короткой жизни (30-50 циклов) и низкого тока отдачи (у батареек маленькой емкости)?
Обычные Литий Ионки судя по всему. Их много в продаже, просто на РВ форма и разъем привычные моделисту 😃