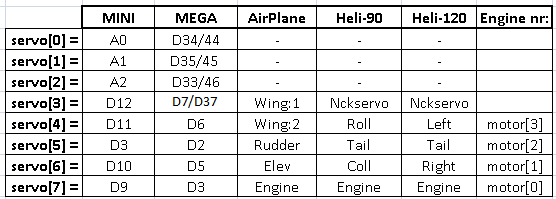
первая строка - научит контроллер, что он управляет самолетом (т.е. что у него в определенных каналах сервы, а не esc)
а вторая - научит, какие датчики задействованы
после этого контроллер подключаем к компу, запускаем гуй - он должен показать картинку самолета и при наклонах платы/датчика должны показываться перемещения
Спасибо. Пока не пришёл usb uart переходник, так что к gui подрубиться не могу. Как придёт, и если будут вопросы, напишу
ну так без ftdi и делать то нечего - прошить мало, настраивать же надо ну и просто “контроллировать”
хм, а чем тогда прошивали?
хм, а чем тогда прошивали?
ну обычный программатор же не отменили еще я думаю 😃
ну обычный программатор же не отменили еще я думаю 😃
именно им и прошивал
а можно ссылку, а то я как то не в теме (не шутка). сам шил свою ардуину про мини через ардуино уно, и так же спокойно потом копашился в GUI через нее
а можно ссылку, а то я как то не в теме (не шутка). сам шил свою ардуину про мини через ардуино уно, и так же спокойно потом копашился в GUI через нее
Спасибо. Чтобы датчик не сходил с ума из-за вибраций, нужно раскомментить одну из этих строк?
//#define MPU6050_LPF_256HZ // This is the default setting, no need to uncomment, just for reference
//#define MPU6050_LPF_188HZ
//#define MPU6050_LPF_98HZ
#define MPU6050_LPF_42HZ
//#define MPU6050_LPF_20HZ
//#define MPU6050_LPF_10HZ
//#define MPU6050_LPF_5HZ
Первая строка видимо не нуждается в раскомментировании? А остальные, все сразу, или можно одновременно только одну? И какую лучше использовать?
И ещё, как надо располагать датчик gy521 в самолёте?
И в догонку . В полёте , чем управляет gy-521? Я так понял, что направление рудером держит. А что ещё он контролит? Сервы элеронов и руля высоты просто дёргаются у меня
Здесь почитай www.p arkflyer.ru/blogs/view_entry/8821
Здесь почитай www.p arkflyer.ru/blogs/view_entry/8821
Так что, управление осуществляется элеронами и рудером?

 Управление идет на все органы управления
Управление идет на все органы управления