MultiWii на самолете

ну обычный программатор же не отменили еще я думаю 😃
именно им и прошивал
а можно ссылку, а то я как то не в теме (не шутка). сам шил свою ардуину про мини через ардуино уно, и так же спокойно потом копашился в GUI через нее
а можно ссылку, а то я как то не в теме (не шутка). сам шил свою ардуину про мини через ардуино уно, и так же спокойно потом копашился в GUI через нее
Ребята, дайте плиз ссылку на последнюю прошивку для CRIUS SE, AIOP, впрочем под мультика для управления самолетом!) Спасибо заранее!
а в гугле что, забанили? первая ссылка по запросу MultiWii code.google.com/p/multiwii/downloads/list
Надо не забыть еще настроить для самолета ее. 😃
Добрый день, два раза перечитал ветку но так и не понял на какой прошивке есть полноценный RTH? И тонкости его настройки.
На сколько я помню есть автовозврат на маховие и патрика прошивках. ардупилот тоже но это уже другая тема.
Ребята, дайте плиз ссылку на последнюю прошивку для CRIUS SE, AIOP, впрочем под мультика для управления самолетом!) Спасибо заранее!
…googlecode.com/…/MultiWii_FW_EOS_b7_140509.rar последняя для самолета . Вот тема www.multiwii.com/forum/viewtopic.php?f=7&t=2456&si… Gui брать здесь eosbandi.com/downloads/
Пришёл usb uart переходник. Не подскажете, что и как настраивать в gui?
Пришёл usb uart переходник. Не подскажете, что и как настраивать в gui?
…blogspot.com/…/how-to-setup-multiwii-airplane-sam… …blogspot.se/…/multiwii-gps-airplane.html
Спасибо. Чтобы датчик не сходил с ума из-за вибраций, нужно раскомментить одну из этих строк?
//#define MPU6050_LPF_256HZ // This is the default setting, no need to uncomment, just for reference
//#define MPU6050_LPF_188HZ
//#define MPU6050_LPF_98HZ
#define MPU6050_LPF_42HZ
//#define MPU6050_LPF_20HZ
//#define MPU6050_LPF_10HZ
//#define MPU6050_LPF_5HZ
Первая строка видимо не нуждается в раскомментировании? А остальные, все сразу, или можно одновременно только одну? И какую лучше использовать?
И ещё, как надо располагать датчик gy521 в самолёте?
И в догонку . В полёте , чем управляет gy-521? Я так понял, что направление рудером держит. А что ещё он контролит? Сервы элеронов и руля высоты просто дёргаются у меня
Здесь почитай www.p arkflyer.ru/blogs/view_entry/8821
Здесь почитай www.p arkflyer.ru/blogs/view_entry/8821
Так что, управление осуществляется элеронами и рудером?
Вот здесь же в таблице написано как подключать fotoflygarn.blogspot.com/2012...lane-same.html 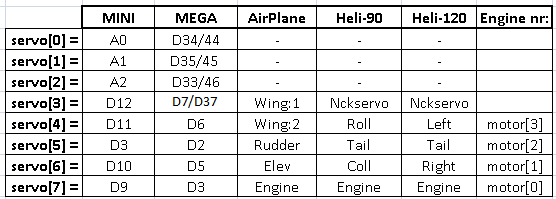 Управление идет на все органы управления
Управление идет на все органы управления
Вот здесь же в таблице написано как подключать fotoflygarn.blogspot.com/2012...lane-same.html Управление идет на все органы управления
Так и подключил. При наклоне влево/право сервы дёргаются и встают на место, хотя, мне кажется, что должны держаться в положении “выправления” до того, как самолёт не восстановит ровный полёт. Или я ошибаюсь?
И ещё, у меня почему-то все режимы горят красным (arm, angle, horizon,passtru). Как сделать их активными?
потому что у вас стоит режим акро, когда полетный контроллер управляется только гироскопами. при этом компенсируются, например, рывки от порывов ветров. для того, что бы самолет удерживал горизонт, нужно выставить режим ANGLE или HORIZON, а для этого нужно настроить переключатель полетных режимов на отдельный канал и приемник подключить на 7 контакт меги

походу мультивий вы никогда не настраивали… советую для изучения multiwiifaq.ts9.ru . пусть он для коптеров, но многое вам объяснит в настройке
Чтобы датчик не сходил с ума из-за вибраций
На электрических пенолётах основной источник вибрации - плохо сбалансированный винт (ВМГ в целом, на самом деле), поэтому, отбалансировав его “в ноль” хотя бы статически, о вибрациях, хоть сколько-нибудь заметно влияющих на работу гиродатчика, можно забыть. На паркфлаере был с месяц назад проект вибростенда для динамической балансировки ВМГ на датчике ADXL345, но это для Ваших задач оверкилл.
В полёте , чем управляет gy-521?
Датчик, по определению, ничем не управляет, он лишь сообщает системе управления о значениях измеряемых им величин, в данном случае - угловых скоростях и проекции вектора ускорения. Управляет, в данном случае, прошивка MultiWii, которая выдаёт команды сервомашинкам, формируя на соответствующих выходах необходимый PWM-сигнал, в котором задаётся положение сервы. С типовым временем цикла мультивия 3-4мс изменения ширины управляющих импульсов происходят весьма быстро. Код MultiWii на самолёте нормальной схемы “интеллектуально” управляет элеронами, рулём высоты, рулём направления и оборотами двигателя, также выдаёт сигнал на закрылки, если такой сигнал передаётся аппаратурой.
На электрических пенолётах основной источник вибрации - плохо сбалансированный винт (ВМГ в целом, на самом деле), поэтому, отбалансировав его “в ноль” хотя бы статически, о вибрациях, хоть сколько-нибудь заметно влияющих на работу гиродатчика, можно забыть. На паркфлаере был с месяц назад проект вибростенда для динамической балансировки ВМГ на датчике ADXL345, но это для Ваших задач оверкилл.
Датчик, по определению, ничем не управляет, он лишь сообщает системе управления о значениях измеряемых им величин, в данном случае - угловых скоростях и проекции вектора ускорения. Управляет, в данном случае, прошивка MultiWii, которая выдаёт команды сервомашинкам, формируя на соответствующих выходах необходимый PWM-сигнал, в котором задаётся положение сервы. С типовым временем цикла мультивия 3-4мс изменения ширины управляющих импульсов происходят весьма быстро. Код MultiWii на самолёте нормальной схемы “интеллектуально” управляет элеронами, рулём высоты, рулём направления и оборотами двигателя, также выдаёт сигнал на закрылки, если такой сигнал передаётся аппаратурой.
Спасибо, разобрался с установкой режимов на тумблеры. Я так понял , horizon рассчитан на удержание самолёта в одном положении, а angle - режим для новичков, ограничивающий отклонение серв, чтобы не угробили самолёт?
И ещё, GYRO_SMOOTHING использовать, только если фильтры не помогут? И фильтр можно одновременно только один активировать? Или можно сразу несколько? И какие лучше?