MultiWii на самолете

а в гуе нет инвертирования хвостовых серв? я просто уже не помню мвии гуй да и с мвии у меня все крылья были
ну или в исходниках можно покопаться - от массива в config.h, где задаются для серв “расходы” и инверты
/* if you want to preset min/middle/max values for servos right after flashing, because of limited physical * room for servo travel, then you must enable and set all three following options */ //#define SERVO_MIN {1020, 1020, 1020, 1020, 1020, 1020, 1020, 1020} //#define SERVO_MAX {2000, 2000, 2000, 2000, 2000, 2000, 2000, 2000} //#define SERVO_MID {1500, 1500, 1500, 1500, 1500, 1500, 1500, 1500} // (*) //#define FORCE_SERVO_RATES {30,30,100,100,100,100,100,100} // 0 = normal, 1= reverseдо своих миксов в Output.cpp (функция mixTable, там есть большой блок "* AIRPLANE *)
дык мне кажется что просто инвертирование будет не то в “элеронном режиме” элевоны должны работать как обычно а рулении по высоте “наизнанку” если я их буду инвертировать через конфиг или гуи они ж
наверное и в "элеронном режиме свое направление поменяют… или нет ?
упс, я не вчитался
т.е. получается имеем фактически летающее крыло, но с управлением высотой наоборот?
в гуе для крыла в разделе серв есть же отдельно инверт для рола, отдельно для “ника” (я хз почему так называется)
т.е. аппой настраиваем правильные отклонение в “мануале”, а для стабилизации инвертируем для “nick” (блин, я могу неправильно называть… не помню уже)
а то, что (вдруг) меняем настройки а внешне ничего не меняется - еще ничего не значит… у меня (да и не только у меня) настройки серв через гуй - всегда какие-то танцы с бубнами, вплоть до очистки eeprom (или резета из гуя) перед каждой настройкой
Что делать. При включении стабилизации в полёте, хвост начинает дёргаться вправо-влево
Что делать. При включении стабилизации в полёте, хвост начинает дёргаться вправо-влево
Попробуй I yaw убрать в ноль
Попробуй I yaw убрать в ноль
как
Через GUI. PID по yaw параметр I поставь 0
где-то читал, что компас на самолете для автовозврата не работает, т.к. на скорости “рулит” всем gps, для мультивии это тоже относится?
Чисто логически - уверен что нет
Хотя бы потому - как без компаса контроллер определит куда носом лететь?
как без компаса контроллер определит куда носом лететь?
Патриков мультивий как раз определяет курс по данным GPS, если компаса нет или если показания компаса и GPS в части курса расходятся более, чем на 10 градусов, а скорость по GPS - более 2 м/с.
Хотя бы потому - как без компаса контроллер определит куда носом лететь?
Про отключение компаса при наборе скорости писали в ArduPlane если не ошибаюсь, почему бы и на вие такое не испльзовать тогда?! снова решил сделать крыл с маховием 😃
А чем так страшен компас? Вероятность отказа поменьше, чем у GPS - в силу относительной простоты, а вероятность потери сигнала при исправном модуле - почти нулевая.
так ради любопытства спросил:)
Все сервы заработали только в инверте, но это уже хорошо, и у серв очень маленькое отклонение ( по сравнению с стандартной multiwii 2.3), куда смотреть? что менять? Кстати wingui 2.2 и multiwiiconf работает, а wingui 2.3 нет, в чем может быть проблема? И GPS работает, правельно показывает местоположение на карте, значит I2C перешивать не нужно? И последний вопрос возможен ли полет по точкам на вие с прошивкой патрика.
Доброго дня. Всетаки сервы спульта на прошивке 140402 не работают, стабилизация отрабатывает при наклонах и все . Может у кого есть заведомо рабочая прошивка на пробу, напомню что в стандартной 2,3 все работает, все летает, значит подключение верное. Ух не хватает нервов.
Андрей, там решительно нечему не работать. Да и код этот в 140402 такой же, как и в базовой версии. У Вас #define AIRPLANE выставлен?
if(f.PASSTHRU_MODE){ // Direct passthru from RX
servo[3] = rcCommand[ROLL] + flapperons[0]; // Wing 1
servo[4] = rcCommand[ROLL] + flapperons[1]; // Wing 2
servo[5] = rcCommand[YAW]; // Rudder
servo[6] = rcCommand[PITCH]; // Elevator
}else{
// Assisted modes (gyro only or gyro+acc according to AUX configuration in Gui
servo[3] = axisPID[ROLL] + flapperons[0]; // Wing 1
servo[4] = axisPID[ROLL] + flapperons[1]; // Wing 2
servo[5] = axisPID[YAW]; // Rudder
servo[6] = axisPID[PITCH]; // Elevator
}
Все вроде победил. Дело было в том что нужно очищать память перед заливкой прошивки. Появилась новая проблема не могу прошить I2C платку, прошивкой которая идет с прошивкой 140402, выскакивает ошибка stk500_getsync(): not in sync: resp=0x00. Подскажите что делаю не так?
Вариантов несколько:
- Неправильно подключаете кабели
- Не отключаете GPS-приемник от платы I2C-GPS, если шьёте через последовательный порт
- Напряжение питания I2C-GPS платы сильно отличается от напряжения USB-TTL переходника
- Неправильно выбираете тип платы, в т.ч. и загрузчик (Optiboot или станартный)
- При программировании через вторую ардуину, используюемую как ISP, не отключаете Reset на ISP-плате
- Неисправна плата или программатор
А кокой тип платы нужно выбирать если платка моя CRIUS I2C-GPS NAV Module, программатор рабочий он же контроллер шьет, а вот по питанию не знаю, как узнать сколько вольт нужно для моей CRIUS I2C-GPS NAV Module?
Тип платы, по идее, Nano w/Atmega 328, питать от программатора (там или 3.3 или 5 вольт - подойдёт любой), программатор подключать, соответственно, на соответствующие пины на боковой стороне платки.
Кто-нибудь пробовал удержание позиции на крыле с маховием делать? да или хотя бы вообще оно работает?
Ребят, привет, решил я сделать всё то же что описывается в этой теме, т.к. стабилизатор - это довольно полезно для начинающих, но в процессе сборки\настройки возникла проблемма - не работают сервы (при том условии что они рабочие и правильно подключены)
arduino pro mini, mpu 6050, LM 2576 - питание, приёмник\передатчик я думаю значения не имеют, сервы - девятиграмовые TG9E,
на ардуину зашито MultiWii 2.3 датчик датчик и приёмник работают исправно и данные с них отображаются в GUI.
возможно я что то упустил из виду, но заставить работать сервы, подключённые согласно этой схеме у меня не получилось
подключённые согласно этой схеме
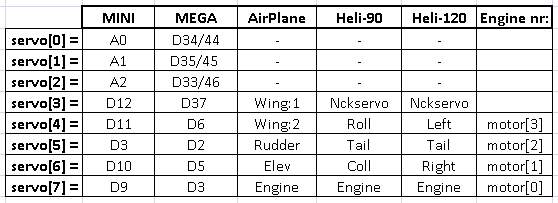
так подключены сервы?