MultiWii на самолете

Андрей, там решительно нечему не работать. Да и код этот в 140402 такой же, как и в базовой версии. У Вас #define AIRPLANE выставлен?
if(f.PASSTHRU_MODE){ // Direct passthru from RX
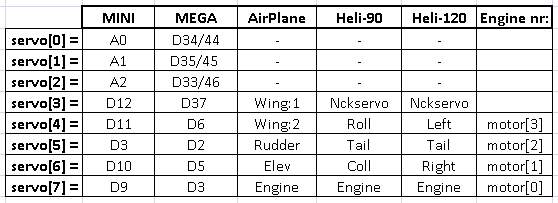
servo[3] = rcCommand[ROLL] + flapperons[0]; // Wing 1
servo[4] = rcCommand[ROLL] + flapperons[1]; // Wing 2
servo[5] = rcCommand[YAW]; // Rudder
servo[6] = rcCommand[PITCH]; // Elevator
}else{
// Assisted modes (gyro only or gyro+acc according to AUX configuration in Gui
servo[3] = axisPID[ROLL] + flapperons[0]; // Wing 1
servo[4] = axisPID[ROLL] + flapperons[1]; // Wing 2
servo[5] = axisPID[YAW]; // Rudder
servo[6] = axisPID[PITCH]; // Elevator
}
Все вроде победил. Дело было в том что нужно очищать память перед заливкой прошивки. Появилась новая проблема не могу прошить I2C платку, прошивкой которая идет с прошивкой 140402, выскакивает ошибка stk500_getsync(): not in sync: resp=0x00. Подскажите что делаю не так?
Вариантов несколько:
- Неправильно подключаете кабели
- Не отключаете GPS-приемник от платы I2C-GPS, если шьёте через последовательный порт
- Напряжение питания I2C-GPS платы сильно отличается от напряжения USB-TTL переходника
- Неправильно выбираете тип платы, в т.ч. и загрузчик (Optiboot или станартный)
- При программировании через вторую ардуину, используюемую как ISP, не отключаете Reset на ISP-плате
- Неисправна плата или программатор
А кокой тип платы нужно выбирать если платка моя CRIUS I2C-GPS NAV Module, программатор рабочий он же контроллер шьет, а вот по питанию не знаю, как узнать сколько вольт нужно для моей CRIUS I2C-GPS NAV Module?
Тип платы, по идее, Nano w/Atmega 328, питать от программатора (там или 3.3 или 5 вольт - подойдёт любой), программатор подключать, соответственно, на соответствующие пины на боковой стороне платки.
Кто-нибудь пробовал удержание позиции на крыле с маховием делать? да или хотя бы вообще оно работает?
Ребят, привет, решил я сделать всё то же что описывается в этой теме, т.к. стабилизатор - это довольно полезно для начинающих, но в процессе сборки\настройки возникла проблемма - не работают сервы (при том условии что они рабочие и правильно подключены)
arduino pro mini, mpu 6050, LM 2576 - питание, приёмник\передатчик я думаю значения не имеют, сервы - девятиграмовые TG9E,
на ардуину зашито MultiWii 2.3 датчик датчик и приёмник работают исправно и данные с них отображаются в GUI.
возможно я что то упустил из виду, но заставить работать сервы, подключённые согласно этой схеме у меня не получилось
подключённые согласно этой схеме
так подключены сервы?
Вопрос к знатокам…Нужно на газ вместо регулятора подцепить серву(хочу попробовать Вий на ДВС самолете)
Может кто знает что нужно подправить в коде?
#define USE_THROTTLESERVO
config.h стоит хотя бы раз прочитать от начала до конца…
Обижаете,это было сделано с самого начала,но почему то все равно не работает.
Пробовал подключать и цифровые и аналоговые сервы,гудят и вроде пытаются двигаться,но не более .Прошивка от ПатрикаЕ,плата на базе ардуино Леонардо…Атмега32у4.
А другие сервы двигаются нормально? Серва газа, буде подключена вместо, условно, сервы руддера, двигается?
Все сервы рабочие,на всех какналах кроме газа отрабатывают как надо.
Кстати если подключть регулятор с мотором (в канал газа)и включить дефайн серво тротл,то он не работает,даже не пищит что мол нет сигнала.Выходит,что что то меняется,но видимо не так как надо…
А A32U4_4_HW_PWM_SERVOS не выставляли?
Не выставлял.А это дает?Единственное с чем баловался,так это Servo Refreshrates.
Ну это уже другая конфигурация получается, я как раз за это боялся… С ходу не знаю, должно работать. Попробуйте затереть EEPROM и залить заново скачанную прошивку с минимальными правками, мало ли что… Refresh Rate лучше вернуть на дефолтные 50Гц - с некоторыми совсем дешевыми сервами больше не работает.
Добрый вечер.Вроде победил проблему.Стер ЕЕПРОМ и перепрошил. Проблема теперь такая.Как менять направление серв? В ГУЙной вкладке меняю,запоминаю,но ничего по факту не меняется.
Как и где менять в коде честно говоря не догоняю…Нужна помощь…
Вообщем разобрался что да как.Почему то настройки сохраняются только один раз после чистки епрома.
Назрел такой вопрос, когда спутники определили положение “дом” и где-то в полете пропадает этот “фикс”, на некоторое время не показываются координаты и положение домой, и сколько бы “фикс” не появлялся он все равно запомнил где дом? и как только спутники появятся он вернет мое положение на “дом”? не будет такого, что “дом” покажет на новом месте где появились спутники?
MultiWii запоминает “дом” при арме. если арм был до фикса, то тогда “дом” будет там, где был певый фикс