MultiWii на самолете

А с crius AllInOne 1.1, крылышко без проблем сконфигурилось? Залил версию 2.1 - в Гуи горизонт как положено отображается, а сервы повернуты на 90 градусов. По крену отрабатывают как тангаж, а тангаж как крен. Не правили output.ino ?
В config.h Есть настройки, описывают куда двигать сервы для крена и тангажа.
*********************** Flying Wing ***********************/
/* you can change change servo orientation and servo min/max values here
valid for all flight modes, even passThrough mode
need to setup servo directions here; no need to swap servos amongst channels at rx */
#define PITCH_DIRECTION_L 1 // left servo - pitch orientation
#define PITCH_DIRECTION_R -1 // right servo - pitch orientation (opposite sign to PITCH_DIRECTION_L, if servos are mounted in mirrored orientation)
#define ROLL_DIRECTION_L 1 // left servo - roll orientation
#define ROLL_DIRECTION_R 1 // right servo - roll orientation (same sign as ROLL_DIRECTION_L, if servos are mounted in mirrored orientation)
Тоже собрал и установил самолет. Но у меня отдельно ардуина и отдельно блок иму. Уставноил для эксперимента на цессну 150, полетная масса 540 грамм, центровка передняя. Вытаскивает самолет в горизонт при ветре 6 м.с
Ветер отключает полностью. Ощущения дикие, щенячий восторг был вначале 😃 Стоковые пиды, прошивка 2.1. Единственно что пришлось найти правильную ориентацию иму. Но так как иму у меня отдельно на 4 проводах это не проблема.
Тоже собрал и установил самолет. Но у меня отдельно ардуина и отдельно блок иму. Уставноил для эксперимента на цессну 150, полетная масса 540 грамм, центровка передняя. Вытаскивает самолет в горизонт при ветре 6 м.с
Ветер отключает полностью. Ощущения дикие, щенячий восторг был вначале 😃 Стоковые пиды, прошивка 2.1. Единственно что пришлось найти правильную ориентацию иму. Но так как иму у меня отдельно на 4 проводах это не проблема.
А можно подробней какая ардуина? Что за блок ИМУ. Где его купить вытащить и ссылку на проект спасибо… И если не трудно пару слов подробней фото и схема подключения…
Ардуина вот такая
Иму вот такая.
Использую стоковую 2.1 , работает с частичным использованием акселя, а в основном на гирах. В планах дождаться миним осд и собрать все в кучу.
Хариер на цессне - 😉 смотрится диком, но самолет только завлеи в хариер и бросили пульт. Мультивии держал его сам.
Схема подключения дана в первом посте ветки. Фото пока дать не могу. Единственно что я сделал это выставил инверт серв и подключил канал газа минуя плату, потому что воевать с армингом не есть хорошо на самолете.
По личным ощущениям вещь получилась отличная, учитывая возможность вывести авиагоризонт в осд и теоретически рабочий режим “RTH” вещь будет очень отличная для меня.
Если кому понадобится менять реверсы серв для стабилизации, вот последовательность
#define SERVO_DIRECTION { -1, 1, 1, -1, -1, 1, -1, 1 } // Invert servos by setting -1
// Selectable channels: {1, 2, 3, 4, ROLL, YAW, PITCH, 8}
Спасибо за ответ! А могу я например использовать вот такую плату hobbyking.com/…/__27033__MultiWii_328P_Flight_Cont… И почему вы выбрали отдельную плату иму? Чем вы руководствовались. Судя по цене иму экономить вы не пытались. Значит ваша конфигурация с отдельной палтой иму чем-то лучше. Можете объяснить в чем плюсы и в чем разница?
Спасибо за ответ! А могу я например использовать вот такую плату hobbyking.com/…/__27033__MultiWii_328P_Flight_Cont… И почему вы выбрали отдельную плату иму? Чем вы руководствовались. Судя по цене иму экономить вы не пытались. Значит ваша конфигурация с отдельной палтой иму чем-то лучше. Можете объяснить в чем плюсы и в чем разница?
Хоббикинговская плата ничем не плоха. Просто я хотел чтобы блок иму я мог закрепить где мне удобнее. А готовую плату мультивии тяжелее разместить правильно и по горизонту, в отличии от маленького блока иму. По цене все выходит дороже, но не настолько чтобы совсем, а в плане размещения, и удобства настроек все в разы приятнее. единственное что пришлось городить кучу проводов. Но это пока тестовая версия, на ней все обкатаем и будет разводить и заказывать единую печатную плату, с осд и гпс модулем на борту.
Изначально я для себя делаю осд с авиагоризонтом и простенькой стабилизацией. по цене выйдет мои блоки + цена гпс + цена миним осд. Будет чуть дороже чем покупная, но даст мне свободу настройки и подгонки под себя.
Если кому понадобится менять реверсы серв для стабилизации, вот последовательность
#define SERVO_DIRECTION { -1, 1, 1, -1, -1, 1, -1, 1 } // Invert servos by setting -1
// Selectable channels: {1, 2, 3, 4, ROLL, YAW, PITCH, 8}
Каналы идут немного по другому, согласно картинке в первом посту
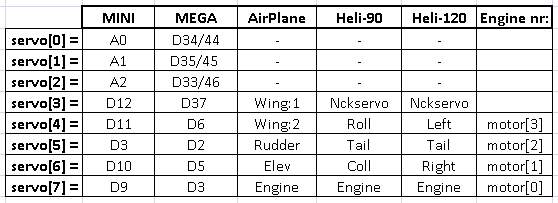
#define SERVO_DIRECTION { -1, 1, 1, -1, -1, 1, -1, 1 } // Invert servos by setting -1
// Selectable channels: {0, 1, 2, WING1, Wing2, Rudder, Elev, THR}
опять же конечно в зависимости от того какой тип носителя вы выбрали, в прошивке 2,1 я выбрал airplane
Единственное на что стоит очень сильно обращать внимание, канал газа должен идти напрямую на регулятор. Точнее через игрек кабель, с приемника зайти в мультивии и парралельно уйти на регулятор. Иначе с армингом будет тяжело.
Эту картинку видел когда изучал тему, но собираю уже не первый самолет и забыл про нее. Не лез в мануал, по памяти все подключил, а сервы вычислил.
Каналы идут немного по другому, согласно картинке в первом посту
И где каналы отличаются? Точно так же идут
тестовый полет
тестовый полет
Центровка сильно задняя или не верен угол установки крыла и хвоста. Весь полёт на винте без нормального планирования.
Центровка сильно задняя или не верен угол установки крыла и хвоста. Весь полёт на винте без нормального планирования.
ммм… дело в том что самолет собран изначально не по правилам. Моя задача была проверить возможности стабилизации. Центровка очень сильно задняя. Самолет без мотора валится сразу. Мотор стоит совсем не по массе самолета, вес превышен в два раза. Но факт что самолет летит, и летит очень ровно. Даже если он идет только на винте без планирования, извините он летает 28 минут… мне за глаза 😃
С зимы изучаю тему по возврату домой на самолете www.multiwii.com/forum/viewtopic.php?f=7&t=2456. Все не как не удавалось затестировать прошивку. То погодные условия мешали, то проблемы с носителем…а то просто отсутствие результата с недонастроенной моделью. И сегодня, наконец…самолет вернулся 😃
Есть еще недоработки в прошивке, такие как
- после возврата самолет продолжает улетать в другую сторону пока не передернешь тумблер возврата
- при включении залипают сервы на какое-то время
- радиус разворота был разный. Пару раз даже приходилось помогать разворачивать самолет, т.к. поле достаточно ограниченное, а самолет размашисто уходил из его зоны в сторону построек и леса
- в один полет возврат вообще не срабатывал, и пришлось посадить самолет и передернуть питание
- при развороте самолет терял немного высоты
Но в целом прошивка работает. Надо еще будет потестировать в выходной с ФПВ и блютусом, посмотреть данные. Думаю еще поднастроить чуть прошивку.
Еще видео
что то я не пойму можно ли сделать стабилизацию по курсу ?
В смысле что бы самолет летел в строго заданном направлении…
У меня на данный момент получилось в гуи настроить стабилизацию по тангажу и крену - что бы при отклонении рули занимали фиксированный угол. А вот по курсу мультивий реагирует на само отклонение, а после задает какой то угол - но очень маленький… Может кто сталкивался?
Коллеги, требуется помощь зала.
Поставил на самолет MultiWii 2.2 на вот этой плате. С режимом сглаживания колебаний (который не Passtrough и не Angle, а режим по умолчанию) - все замечательно. Проблемы начинаются с режимом Angle. Углы тангажа и крена он действительно держит, только не те, которые надо. Поскольку у самолета довольно большие значения субтриммеров, плата в режиме Angle воспринимает отклонения каналов от нуля как целевые углы и соответственно самолет и ставит.
Вопрос : это как-то настраивается без правки кода ? Как сказать MultiWii, что положение “ручка брошена” - это не ровно 1500 мкс на канал, а те триммера, которые сейчас есть ?
можно ли сделать стабилизацию по курсу ?
Нужно поставить режим MAG в дополнение к ANGLE и откалибровать магнитометр.
#define SERVO_DIRECTION { -1, 1, 1, -1, -1, 1, -1, 1 } // Invert servos by setting -1
// Selectable channels: {1, 2, 3, 4, ROLL, YAW, PITCH, 8}
Вот нет бы им этот комментарий в код внести. Час промудохался с вот этими ±1.
Спасибо! Попробую. Кстати плата у меня такая-же. ( мультивий 328P ) Поддерживаю вопрос - мне то-же интересно…
П.С.
RTemka: то-же спасибо… Пытался в личку ответить, но что то у меня сообщения не отправляются…
А что за “Пират” такой? где почитать можно ?
Режим маг включил, компас откалибровал. Плата выставляет угол, но все равно реагирует на изменение курса большим углом …
То есть задает угол больше чем нужно во время движения ( кручение платы по курсу )
как только плата перестает двигаться по курсу - выставляется нужный угол…
Мне-же нужно, что-бы плата задавала угол пропорционально отклонению…
Просто я пытаюсь приспособить самолетный режим под трехосевой гимбал…
так как режим гимбал имеет всего две оси, то приходится как-то извращаться…
Ура, все я разобрался…
Привет,нужна помощ у меня контроллер MultiWii NanoWii ATmega32U4 Micro Flight Controller специально взял для самика.
В прошивку я раскоментировал летающие крыло и залил прошивку,после того я подсоединил серво и включил арминг и ничего не происходит,что делать дальше?
А, что должно произойти ???😃
машинки не реагируют
Спросите в профильной теме про мультивий.
Привет,нужна помощ у меня контроллер MultiWii NanoWii ATmega32U4 Micro Flight Controller специально взял для самика. В прошивку я раскоментировал летающие крыло и залил прошивку,после того я подсоединил серво и включил арминг и ничего не происходит,что делать дальше?
Сконфигурированная прошивка www.ex.ua/load/82551548
Сервы вроде на D5 и D11.
Удачи
P.S. только сателлит надо отключить в прошивке или повесить на плату вместо приемника
что то не выходит,машинки по прежнему не реагируют:(
А питание на платку идет? Там есть перемычка SJ2, которую надо запаять, если питание 5 вольт от БЭКа, и оставить незапаянной - если от батареи.
Вообще, надо изучить мануал www.hobbyking.com/…/741171780X846863X47.pdf
что то не выходит,машинки по прежнему не реагируют:(
В наземке входные каналы шевеляться ??
Если шевеляться, то какой полетный режим стоит ? И те ли каналы шевелятся.
И вообще наземка то коннектиться ?